|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
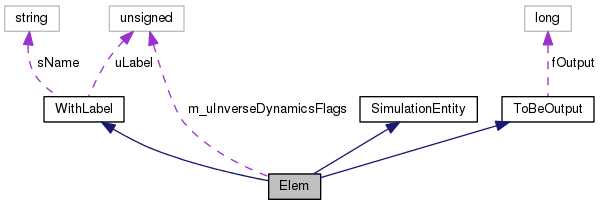
#include <elem.h>
Inherits WithLabel, SimulationEntity, and ToBeOutput.
Inherited by AbsoluteCouple [virtual], AbsoluteDispForce [virtual], AbsoluteForce [virtual], AbsoluteInternalCouple [virtual], AbsoluteInternalDispForce [virtual], AbsoluteInternalForce [virtual], AbstractForce [virtual], AbstractInternalForce [virtual], Accelerometer [virtual], Accumulator [virtual], Actuator [virtual], Aerodynamic2DElem< iNN > [virtual], Aerodynamic2DElem< 1 > [virtual], Aerodynamic2DElem< 2 > [virtual], Aerodynamic2DElem< 3 > [virtual], AerodynamicBeam [virtual], AerodynamicBeam2 [virtual], AerodynamicBody [virtual], AerodynamicElem [virtual], AerodynamicModal [virtual], AeroDynModule [virtual], AircraftInstruments [virtual], AirProperties [virtual], AngularAccelerationJoint [virtual], AngularVelocityJoint [virtual], asynchronous_machine [virtual], AutomaticStructDispElem [virtual], AutomaticStructElem [virtual], AxialRotationJoint [virtual], BasicAirProperties [virtual], Beam [virtual], Beam2 [virtual], BeamSliderJoint [virtual], Body [virtual], Brake [virtual], BufferStreamElem [virtual], BufferStreamElem_base [virtual], BufferStreamElemRaw [virtual], Bulk [virtual], BulkSpringSupport [virtual], CentralGravity [virtual], ClampJoint [virtual], ContactJoint [virtual], Control_valve [virtual], Control_valve2 [virtual], CyclocopterInflow [virtual], CyclocopterNoInflow [virtual], CyclocopterPolimi [virtual], CyclocopterUniform1D [virtual], CyclocopterUniform2D [virtual], DeformableAxialJoint [virtual], DeformableDispJoint [virtual], DeformableHingeJoint [virtual], DeformableJoint [virtual], DiscreteControlElem [virtual], DispMeasure [virtual], DistanceJoint [virtual], DistanceJointWithOffset [virtual], DriveDisplacementJoint [virtual], DriveDisplacementPinJoint [virtual], DriveHingeJoint [virtual], DrivenElem [virtual], Dynamic_control_valve [virtual], Dynamic_pipe [virtual], DynamicBody [virtual], DynamicInflowRotor [virtual], DynamicMass [virtual], DynamicPipe [virtual], DynamicRegularization [virtual], DynamicVariableBody [virtual], ElasticAxialJoint [virtual], ElasticDispJoint [virtual], ElasticDispJointInv [virtual], ElasticHingeJoint [virtual], ElasticHingeJointInv [virtual], ElasticJoint [virtual], ElasticJointInv [virtual], Electric [virtual], ElemGravityOwner [virtual], ElemWithDofs [virtual], ExtForce [virtual], Flow_valve [virtual], FollowerCouple [virtual], FollowerForce [virtual], FollowerInternalCouple [virtual], FollowerInternalForce [virtual], Force [virtual], Genel [virtual], GenelClamp [virtual], GenelCrossSpringDamperSupport [virtual], GenelCrossSpringSupport [virtual], GenelDistance [virtual], GenelMass [virtual], GenelSpring [virtual], GenelSpringDamperSupport [virtual], GenelSpringSupport [virtual], GenericAerodynamicForce [virtual], GimbalRotationJoint [virtual], GlauertRotor [virtual], Gravity [virtual], HBeam [virtual], HydraulicElem [virtual], HydrodynamicPlainBearing [virtual], InducedVelocity [virtual], InducedVelocityElem [virtual], Inertia [virtual], InitialAssemblyElem [virtual], InlineFriction [virtual], InLineJoint [virtual], InLineWithOffsetJoint [virtual], InPlaneJoint [virtual], InPlaneWithOffsetJoint [virtual], JacobianRegularization [virtual], Joint [virtual], Joint_ [virtual], Joint_1Node [virtual], Joint_2Nodes [virtual], Joint_NNodes [virtual], JointRegularization [virtual], LinearAccelerationJoint [virtual], LinearVelocityJoint [virtual], LoadableElem [virtual], LoadIncForce [virtual], LoadIncNorm [virtual], ManglerRotor [virtual], Mass [virtual], Membrane [virtual], Membrane4EAS [virtual], MinorLoss [virtual], Modal [virtual], ModalBody [virtual], ModalExt [virtual], ModalForce [virtual], ModalMappingExt [virtual], ModuleFMU [virtual], ModuleIMU [virtual], ModuleIMUConstraint [virtual], ModuleMDS [virtual], ModuleNonsmoothNode [virtual], ModuleTemplate [virtual], Motor [virtual], NestedElem [virtual], NoRotor [virtual], Orifice [virtual], PetersHeRotor [virtual], PinJoint [virtual], Pipe [virtual], PlaneHingeJoint [virtual], PlanePinJoint [virtual], PlaneRotationJoint [virtual], PointSurfaceContact [virtual], Pressure_flow_control_valve [virtual], Pressure_valve [virtual], PrismaticJoint [virtual], Rod [virtual], RodBezier [virtual], RodWithOffset [virtual], RotAccel [virtual], Rotor [virtual], RotorTrim [virtual], RotorTrimBase [virtual], RotorTrimGeneric [virtual], RTMBDynOutElem [virtual], Shell [virtual], Shell4EAS [virtual], Shell4EASANS [virtual], SphericalHingeJoint [virtual], StaticBody [virtual], StaticMass [virtual], StaticVariableBody [virtual], StdAirProperties [virtual], StreamOutElem [virtual], StructExtEDGEForce [virtual], StructExtForce [virtual], StructMappingExtForce [virtual], StructMembraneMappingExtForce [virtual], StructuralForce [virtual], StructuralInternalForce [virtual], SwashPlate [virtual], Tank [virtual], Thermal [virtual], ThreeWayMinorLoss [virtual], TikhonovRegularization [virtual], TimeStep [virtual], TotalEquation [virtual], TotalForce [virtual], TotalJoint [virtual], TotalPinJoint [virtual], TotalReaction [virtual], TranslAccel [virtual], UniformGravity [virtual], UniformRotor [virtual], UniformRotor2 [virtual], UniversalHingeJoint [virtual], UniversalPinJoint [virtual], UniversalRotationJoint [virtual], UserDefinedElem [virtual], VariableBody [virtual], ViscoElasticAxialJoint [virtual], ViscoElasticBeam [virtual], ViscoElasticBeam2 [virtual], ViscoElasticDispJoint [virtual], ViscoElasticHingeJoint [virtual], ViscoElasticHingeJointInv [virtual], ViscoElasticJoint [virtual], ViscoElasticRod [virtual], ViscousAxialJoint [virtual], ViscousBody [virtual], ViscousDispJoint [virtual], ViscousHingeJoint [virtual], ViscousHingeJointInv [virtual], ViscousJoint [virtual], Wheel2 [virtual], and Wheel4 [virtual].
Classes | |
| struct | ChangedEquationStructure |
Public Types | |
| enum | Type { UNKNOWN = -1, AIRPROPERTIES = 0, INDUCEDVELOCITY, AUTOMATICSTRUCTURAL, GRAVITY, BODY, JOINT, JOINT_REGULARIZATION, BEAM, PLATE, FORCE, INERTIA, ELECTRICBULK, ELECTRIC, THERMAL, HYDRAULIC, BULK, LOADABLE, DRIVEN, EXTERNAL, AEROMODAL, AERODYNAMIC, GENEL, SOCKETSTREAM_OUTPUT, RTAI_OUTPUT = SOCKETSTREAM_OUTPUT, LASTELEMTYPE } |
 Public Types inherited from SimulationEntity Public Types inherited from SimulationEntity | |
| typedef std::vector< Hint * > | Hints |
| Public Types inherited from ToBeOutput | |
| enum | { OUTPUT = 0x1U, OUTPUT_MASK = 0xFU, OUTPUT_PRIVATE = 0x10U, OUTPUT_PRIVATE_MASK = ~OUTPUT_MASK } |
Public Member Functions | |
| Elem (unsigned int uL, flag fOut) | |
| virtual | ~Elem (void) |
| virtual std::ostream & | Restart (std::ostream &out) const =0 |
| virtual Elem::Type | GetElemType (void) const =0 |
| virtual unsigned int | iGetNumDof (void) const |
| virtual std::ostream & | DescribeDof (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeDof (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual std::ostream & | DescribeEq (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeEq (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual DofOrder::Order | GetDofType (unsigned int) const |
| virtual void | WorkSpaceDim (integer *piNumRows, integer *piNumCols) const =0 |
| virtual void | AssMats (VariableSubMatrixHandler &WorkMatA, VariableSubMatrixHandler &WorkMatB, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr)=0 |
| virtual VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr)=0 |
| virtual bool | bInverseDynamics (void) const |
| void | SetInverseDynamicsFlags (unsigned uIDF) |
| unsigned | GetInverseDynamicsFlags (void) const |
| bool | bIsErgonomy (void) const |
| bool | bIsRightHandSide (void) const |
| virtual VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| virtual SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr, const VectorHandler &XPrimePrimeCurr, InverseDynamics::Order iOrder=InverseDynamics::INVERSE_DYNAMICS) |
| virtual int | GetNumConnectedNodes (void) const |
| virtual void | GetConnectedNodes (std::vector< const Node * > &connectedNodes) const |
| Public Member Functions inherited from WithLabel | |
| WithLabel (unsigned int uL=0, const std::string &sN="") | |
| virtual | ~WithLabel (void) |
| void | PutLabel (unsigned int uL) |
| void | PutName (const std::string &sN) |
| unsigned int | GetLabel (void) const |
| const std::string & | GetName (void) const |
| Public Member Functions inherited from SimulationEntity | |
| SimulationEntity (void) | |
| virtual | ~SimulationEntity (void) |
| virtual bool | bIsValidIndex (unsigned int i) const |
| virtual DofOrder::Order | GetEqType (unsigned int i) const |
| virtual void | SetValue (DataManager *pDM, VectorHandler &X, VectorHandler &XP, SimulationEntity::Hints *h=0) |
| virtual Hint * | ParseHint (DataManager *pDM, const char *s) const |
| virtual void | BeforePredict (VectorHandler &, VectorHandler &, VectorHandler &, VectorHandler &) const |
| virtual void | AfterPredict (VectorHandler &X, VectorHandler &XP) |
| virtual void | Update (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | DerivativesUpdate (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | Update (const VectorHandler &XCurr, InverseDynamics::Order iOrder) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP, const VectorHandler &XPP) |
| virtual unsigned int | iGetNumPrivData (void) const |
| virtual unsigned int | iGetPrivDataIdx (const char *s) const |
| virtual doublereal | dGetPrivData (unsigned int i) const |
| virtual std::ostream & | OutputAppend (std::ostream &out) const |
| virtual void | ReadInitialState (MBDynParser &HP) |
| Public Member Functions inherited from ToBeOutput | |
| ToBeOutput (flag fOut=fDefaultOut) | |
| virtual | ~ToBeOutput (void) |
| virtual void | OutputPrepare (OutputHandler &OH) |
| virtual void | Output (OutputHandler &OH) const |
| virtual void | Output (OutputHandler &OH, const VectorHandler &X, const VectorHandler &XP) const |
| virtual flag | fToBeOutput (void) const |
| virtual bool | bToBeOutput (void) const |
| virtual void | SetOutputFlag (flag f=flag(1)) |
Private Attributes | |
| unsigned | m_uInverseDynamicsFlags |
Additional Inherited Members | |
| Protected Attributes inherited from WithLabel | |
| unsigned int | uLabel |
| std::string | sName |
| Protected Attributes inherited from ToBeOutput | |
| flag | fOutput |
| enum Elem::Type |
Definition at line 91 of file elem.h.
Definition at line 41 of file elem.cc.
References NO_OP.
|
virtual |
|
pure virtual |
Implemented in PetersHeRotor, FollowerInternalCouple, DynamicInflowRotor, PlanePinJoint, FollowerInternalForce, LoadIncForce, ViscoElasticHingeJoint, Flow_valve, TotalForce, AbsoluteInternalForce, AerodynamicBeam2, StaticBody, Pressure_valve, AxialRotationJoint, GenelMass, ModalBody, ViscoElasticAxialJoint, FollowerCouple, ViscousHingeJoint, GenelSpringDamperSupport, TimeStep, Shell4EASANS, AerodynamicBeam, Pressure_flow_control_valve, TotalPinJoint, ModuleIMUConstraint, DynamicBody, Shell4EAS, TotalReaction, Beam, GenelCrossSpringDamperSupport, Wheel4, ViscousAxialJoint, DiscreteControlElem, FollowerForce, GenelCrossSpringSupport, RodWithOffset, ClampJoint, Modal, AerodynamicBody, Dynamic_control_valve, PlaneRotationJoint, UniversalPinJoint, Membrane4EAS, DriveDisplacementPinJoint, DynamicPipe, LoadableElem, AutomaticStructElem, Beam2, GenelSpringSupport, StaticVariableBody, AbsoluteForce, HBeam, PiezoActuatorVEBeam, JacobianRegularization, ElasticHingeJoint, ViscoElasticRod, InducedVelocity, StaticMass, PiezoActuatorVEBeam2, Orifice, ElasticAxialJoint, InPlaneWithOffsetJoint, Control_valve2, PinJoint, AeroDynModule, GenelSpring, RotAccel, UniversalRotationJoint, DistanceJointWithOffset, TotalJoint, Joint_NNodes, Tank, DeformableJoint, DynamicRegularization, TotalEquation, GenelStateSpaceMIMO, AngularVelocityJoint, InLineWithOffsetJoint, ModuleNonsmoothNode, AerodynamicModal, Dynamic_pipe, BeamSliderJoint, DynamicVariableBody, AngularAccelerationJoint, PlaneHingeJoint, DeformableDispJoint, DynamicMass, ThreeWayMinorLoss, Joint_2Nodes, AirProperties, Inertia, AutomaticStructDispElem, NestedElem, DriveHingeJoint, GenelDistance, Brake, ViscousBody, TranslAccel, DriveDisplacementJoint, GenericAerodynamicForce, PointSurfaceContact, RotorTrimBase, Motor, PiezoActuatorBeam, TikhonovRegularization, Rod, SwashPlate, BulkSpringSupport, Accumulator, PiezoActuatorBeam2, Force, GimbalRotationJoint, RodBezier, Wheel2, Gravity, asynchronous_machine, Joint_1Node, AircraftInstruments, Actuator, ModuleFMU, ContactJoint, InPlaneJoint, DrivenElem, InPlaneContactJoint, PrismaticJoint, SphericalHingeJoint, GenelStateSpaceSISO, UniversalHingeJoint, Control_valve, LoadIncNorm, DistanceJoint, Pipe, LinearVelocityJoint, InLineJoint, InlineFriction, MinorLoss, GenelClamp, LinearAccelerationJoint, StreamOutElem, Accelerometer, HydrodynamicPlainBearing, DispMeasure, ModuleIMU, ModuleMDS, ModuleTemplate, ThermalResistance, ThermalCapacitance, and ThermalSource.
Referenced by DataManager::AssConstrJac(), DrivenElem::AssJac(), NestedElem::AssJac(), and DataManager::AssJac().
|
virtual |
Reimplemented in TotalPinJoint, ClampJoint, Beam2, ElasticJoint, ElasticHingeJoint, ElasticDispJoint, ElasticAxialJoint, TotalJoint, NestedElem, Rod, Inertia, RodBezier, TikhonovRegularization, and DrivenElem.
Definition at line 96 of file elem.cc.
References GetElemType(), WithLabel::GetLabel(), and psElemNames.
|
virtual |
Reimplemented in ViscoElasticHingeJoint, StaticBody, ModalBody, ViscoElasticAxialJoint, ViscousHingeJoint, DynamicBody, Beam, ElasticJointInv, ViscousAxialJoint, ElasticDispJointInv, ClampJoint, LoadableElem, AutomaticStructElem, ElasticJoint, StaticVariableBody, ElasticHingeJoint, StaticMass, ElasticDispJoint, ElasticAxialJoint, DeformableJoint, DynamicVariableBody, DeformableDispJoint, DynamicMass, AutomaticStructDispElem, NestedElem, ViscousBody, Rod, and DrivenElem.
Definition at line 55 of file elem.cc.
References GetElemType(), WithLabel::GetLabel(), and psElemNames.
Referenced by DrivenElem::AssMats(), NestedElem::AssMats(), and DataManager::AssMats().
|
pure virtual |
Implemented in CyclocopterPolimi, CyclocopterUniform2D, PetersHeRotor, FollowerInternalCouple, AbsoluteInternalCouple, DynamicInflowRotor, FollowerInternalForce, ViscoElasticHingeJoint, PlanePinJoint, LoadIncForce, CyclocopterUniform1D, Flow_valve, TotalForce, ViscoElasticDispJoint, AbsoluteInternalForce, AerodynamicBeam2, StaticBody, ManglerRotor, Pressure_valve, AxialRotationJoint, GenelMass, ModalBody, ViscoElasticAxialJoint, GlauertRotor, ViscousDispJoint, ViscousHingeJoint, FollowerCouple, CyclocopterNoInflow, GenelSpringDamperSupport, TimeStep, AerodynamicBeam, Pressure_flow_control_valve, TotalPinJoint, ModuleIMUConstraint, DynamicBody, Shell4EASANS, AbsoluteCouple, TotalReaction, GenelCrossSpringDamperSupport, Shell4EAS, ViscousAxialJoint, Beam, ElasticDispJointInv, Wheel4, DiscreteControlElem, ClampJoint, FollowerForce, GenelCrossSpringSupport, RodWithOffset, AerodynamicBody, Modal, UniformRotor, Dynamic_control_valve, PlaneRotationJoint, UniversalPinJoint, DriveDisplacementPinJoint, LoadableElem, AutomaticStructElem, DynamicPipe, Membrane4EAS, GenelSpringSupport, StaticVariableBody, Beam2, AbsoluteForce, ElasticHingeJoint, NoRotor, HBeam, ViscoElasticRod, AbstractInternalForce, StaticMass, ElasticDispJoint, ElasticAxialJoint, JacobianRegularization, Orifice, InPlaneWithOffsetJoint, GenelSpring, Control_valve2, AeroDynModule, PinJoint, RotAccel, UniversalRotationJoint, DeformableJoint, DistanceJointWithOffset, TotalJoint, ModalExt, Tank, TotalEquation, GenelStateSpaceMIMO, InLineWithOffsetJoint, ModuleNonsmoothNode, AerodynamicModal, AngularVelocityJoint, Joint_NNodes, Dynamic_pipe, BeamSliderJoint, DynamicRegularization, DynamicVariableBody, AbstractForce, UniformGravity, AngularAccelerationJoint, DynamicMass, PlaneHingeJoint, AutomaticStructDispElem, ContactJoint, NestedElem, ThreeWayMinorLoss, ViscousBody, AirProperties, Inertia, DriveHingeJoint, GenelDistance, Brake, DriveDisplacementJoint, TranslAccel, AbsoluteInternalDispForce, Joint_2Nodes, BulkSpringSupport, GenericAerodynamicForce, StructMappingExtForce, PointSurfaceContact, StructExtForce, RotorTrimBase, Rod, Motor, SwashPlate, Accumulator, GimbalRotationJoint, ModalMappingExt, RodBezier, Gravity, Wheel2, asynchronous_machine, AircraftInstruments, TikhonovRegularization, Actuator, ModuleFMU, DrivenElem, InPlaneJoint, GenelStateSpaceSISO, Joint_1Node, InPlaneContactJoint, PrismaticJoint, SphericalHingeJoint, UniversalHingeJoint, Control_valve, HydrodynamicPlainBearing, LoadIncNorm, Pipe, DistanceJoint, LinearVelocityJoint, InLineJoint, InlineFriction, GenelClamp, MinorLoss, LinearAccelerationJoint, Accelerometer, ModalForce, DispMeasure, StreamOutElem, AbsoluteDispForce, ModuleIMU, ModuleMDS, ModuleTemplate, ThermalResistance, ThermalCapacitance, and ThermalSource.
Referenced by DataManager::AssConstrRes(), DrivenElem::AssRes(), NestedElem::AssRes(), and DataManager::AssRes().
|
virtual |
Reimplemented in FollowerInternalCouple, AbsoluteInternalCouple, FollowerInternalForce, ViscoElasticHingeJoint, TotalForce, ViscoElasticDispJoint, AbsoluteInternalForce, StaticBody, ViscoElasticAxialJoint, ViscousDispJoint, ViscousHingeJoint, FollowerCouple, TotalPinJoint, AbsoluteCouple, ViscousAxialJoint, Beam, ElasticDispJointInv, ClampJoint, FollowerForce, Beam2, StaticVariableBody, ElasticHingeJoint, AbsoluteForce, StaticMass, ElasticDispJoint, ElasticAxialJoint, TotalJoint, DeformableJoint, NestedElem, Rod, Inertia, ViscousBody, RodBezier, AbsoluteInternalDispForce, DrivenElem, and AbsoluteDispForce.
Definition at line 106 of file elem.cc.
References GetElemType(), WithLabel::GetLabel(), invdyn2str(), and psElemNames.
|
virtual |
Reimplemented in TotalForce, StaticBody, TotalPinJoint, Beam, ClampJoint, Beam2, StaticVariableBody, StaticMass, TotalJoint, NestedElem, Rod, ViscousBody, Inertia, DeformableHingeJoint, RodBezier, DeformableDispJoint, DeformableJoint, TikhonovRegularization, and DeformableAxialJoint.
Definition at line 65 of file elem.cc.
Referenced by NestedElem::bInverseDynamics(), and ReadBeam2().
| bool Elem::bIsErgonomy | ( | void | ) | const |
Definition at line 83 of file elem.cc.
References InverseDynamics::ERGONOMY, and m_uInverseDynamicsFlags.
Referenced by DataManager::AssConstrJac(), DataManager::AssConstrRes(), DrivenElem::AssJac(), RodBezier::AssJac(), Rod::AssJac(), ElasticAxialJoint::AssJac(), ElasticDispJoint::AssJac(), ElasticHingeJoint::AssJac(), ElasticJoint::AssJac(), Beam2::AssJac(), RodBezier::AssRes(), Rod::AssRes(), DeformableJoint::AssRes(), ElasticAxialJoint::AssRes(), ElasticDispJoint::AssRes(), ElasticHingeJoint::AssRes(), Beam2::AssRes(), and DataManager::IDDofInit().
| bool Elem::bIsRightHandSide | ( | void | ) | const |
Definition at line 89 of file elem.cc.
References m_uInverseDynamicsFlags, and InverseDynamics::RIGHT_HAND_SIDE.
Referenced by DataManager::AssRes(), and DataManager::IDDofInit().
|
virtual |
Implements SimulationEntity.
Reimplemented in PlanePinJoint, AxialRotationJoint, TotalPinJoint, TotalReaction, Modal, ClampJoint, PlaneRotationJoint, DriveDisplacementPinJoint, Aerodynamic2DElem< iNN >, Aerodynamic2DElem< 1 >, Aerodynamic2DElem< 2 >, Aerodynamic2DElem< 3 >, TotalJoint, TotalEquation, PlaneHingeJoint, DriveHingeJoint, DriveDisplacementJoint, NestedElem, asynchronous_machine, and InlineFriction.
Definition at line 124 of file elem.cc.
Referenced by NestedElem::DescribeDof(), DataManager::DofOwnerInit(), and DataManager::InitialJointAssembly().
|
virtual |
Implements SimulationEntity.
Reimplemented in PlanePinJoint, AxialRotationJoint, TotalPinJoint, TotalReaction, Modal, ClampJoint, PlaneRotationJoint, DriveDisplacementPinJoint, Aerodynamic2DElem< iNN >, Aerodynamic2DElem< 1 >, Aerodynamic2DElem< 2 >, Aerodynamic2DElem< 3 >, TotalJoint, TotalEquation, PlaneHingeJoint, DriveHingeJoint, DriveDisplacementJoint, and NestedElem.
Definition at line 130 of file elem.cc.
References ASSERT.
|
virtual |
Implements SimulationEntity.
Reimplemented in PlanePinJoint, AxialRotationJoint, TotalPinJoint, Modal, ClampJoint, PlaneRotationJoint, DriveDisplacementPinJoint, Aerodynamic2DElem< iNN >, Aerodynamic2DElem< 1 >, Aerodynamic2DElem< 2 >, Aerodynamic2DElem< 3 >, TotalJoint, TotalEquation, PlaneHingeJoint, DriveHingeJoint, DriveDisplacementJoint, NestedElem, asynchronous_machine, and InlineFriction.
Definition at line 137 of file elem.cc.
Referenced by NestedElem::DescribeEq(), DataManager::DofOwnerInit(), and DataManager::InitialJointAssembly().
|
virtual |
Implements SimulationEntity.
Reimplemented in PlanePinJoint, AxialRotationJoint, TotalPinJoint, Modal, ClampJoint, PlaneRotationJoint, DriveDisplacementPinJoint, Aerodynamic2DElem< iNN >, Aerodynamic2DElem< 1 >, Aerodynamic2DElem< 2 >, Aerodynamic2DElem< 3 >, TotalJoint, TotalEquation, PlaneHingeJoint, DriveHingeJoint, DriveDisplacementJoint, and NestedElem.
Definition at line 143 of file elem.cc.
References ASSERT.
|
inlinevirtual |
Reimplemented in PlanePinJoint, LoadIncForce, Flow_valve, AerodynamicBeam2, AxialRotationJoint, Pressure_valve, StructuralInternalForce, GenelMass, TotalPinJoint, Shell4EASANS, AerodynamicBeam, Beam, TimeStep, GenelSpringDamperSupport, Pressure_flow_control_valve, Shell4EAS, Modal, TotalReaction, ModuleIMUConstraint, GenelCrossSpringDamperSupport, ClampJoint, Beam2, Wheel4, Body, DiscreteControlElem, PlaneRotationJoint, AerodynamicBody, Membrane4EAS, UniversalPinJoint, DriveDisplacementPinJoint, GenelCrossSpringSupport, Dynamic_control_valve, LoadableElem, HBeam, StaticVariableBody, AutomaticStructElem, DynamicPipe, GenelSpringSupport, AbstractInternalForce, TotalJoint, PiezoActuatorVEBeam, InducedVelocity, InPlaneWithOffsetJoint, TotalEquation, PinJoint, ContactJoint, DistanceJointWithOffset, PiezoActuatorVEBeam2, UniversalRotationJoint, Orifice, AerodynamicModal, AeroDynModule, AngularVelocityJoint, BeamSliderJoint, Control_valve2, InLineWithOffsetJoint, RotAccel, GenelSpring, DynamicVariableBody, StructuralForce, GenelStateSpaceMIMO, Tank, ModalExt, PlaneHingeJoint, AngularAccelerationJoint, Rotor, Rod, Dynamic_pipe, AbstractForce, ModuleNonsmoothNode, RotorTrim, DriveHingeJoint, DriveDisplacementJoint, NestedElem, Brake, GenericAerodynamicForce, RodBezier, DeformableJoint, AutomaticStructDispElem, DeformableDispJoint, AbsoluteInternalDispForce, DeformableHingeJoint, ThreeWayMinorLoss, GenelDistance, BulkSpringSupport, TranslAccel, GimbalRotationJoint, StructMappingExtForce, DeformableAxialJoint, SphericalHingeJoint, StructExtForce, PrismaticJoint, RotorTrimBase, InPlaneJoint, PiezoActuatorBeam, Motor, SwashPlate, Accumulator, PiezoActuatorBeam2, DistanceJoint, UniversalHingeJoint, AircraftInstruments, InPlaneContactJoint, ViscousBody, ModalMappingExt, LinearVelocityJoint, Actuator, InLineJoint, CyclocopterInflow, Wheel2, GenelStateSpaceSISO, asynchronous_machine, ModuleFMU, LinearAccelerationJoint, ModalForce, Mass, Pipe, Control_valve, LoadIncNorm, AbsoluteDispForce, HydrodynamicPlainBearing, GenelClamp, Accelerometer, MinorLoss, InlineFriction, DispMeasure, ModuleIMU, ModuleMDS, ModuleTemplate, ThermalResistance, ThermalCapacitance, and ThermalSource.
Definition at line 243 of file elem.h.
Referenced by DataManager::DofOwnerInit(), NestedElem::GetConnectedNodes(), PiezoActuatorVEBeam2::GetConnectedNodes(), PiezoActuatorVEBeam::GetConnectedNodes(), and GetNumConnectedNodes().
|
virtual |
Implements SimulationEntity.
Reimplemented in PlanePinJoint, Flow_valve, Pressure_valve, GenelMass, AxialRotationJoint, Pressure_flow_control_valve, TotalPinJoint, ModuleIMUConstraint, Wheel4, Shell4EASANS, TotalReaction, DiscreteControlElem, Shell4EAS, Modal, InducedVelocityElem, Dynamic_control_valve, ClampJoint, UniversalPinJoint, PlaneRotationJoint, DriveDisplacementPinJoint, DynamicPipe, LoadableElem, Membrane4EAS, Aerodynamic2DElem< iNN >, Aerodynamic2DElem< 1 >, Aerodynamic2DElem< 2 >, Aerodynamic2DElem< 3 >, Orifice, InPlaneWithOffsetJoint, Control_valve2, AeroDynModule, RotAccel, PinJoint, UniversalRotationJoint, Tank, DistanceJointWithOffset, ModuleNonsmoothNode, Dynamic_pipe, AngularVelocityJoint, InLineWithOffsetJoint, GenelStateSpaceMIMO, BeamSliderJoint, TotalJoint, AerodynamicModal, AngularAccelerationJoint, TotalEquation, DeformableJoint, ThreeWayMinorLoss, PlaneHingeJoint, DeformableDispJoint, TranslAccel, ModuleFMU, DriveHingeJoint, GenelDistance, DriveDisplacementJoint, Brake, Motor, NestedElem, Accumulator, LoadIncNorm, ViscousBody, Actuator, asynchronous_machine, ContactJoint, GimbalRotationJoint, InPlaneJoint, Control_valve, InPlaneContactJoint, SphericalHingeJoint, Pipe, UniversalHingeJoint, PrismaticJoint, GenelStateSpaceSISO, LinearVelocityJoint, MinorLoss, DistanceJoint, ModuleMDS, LinearAccelerationJoint, InLineJoint, InlineFriction, Accelerometer, and GenelClamp.
Definition at line 150 of file elem.cc.
References GetElemType(), WithLabel::GetLabel(), MBDYN_EXCEPT_ARGS, and psElemNames.
Referenced by DrivenElem::AssJac(), DataManager::DofOwnerInit(), and NestedElem::GetDofType().
|
pure virtual |
Implemented in Shell4EASANS, Body, Beam, InducedVelocityElem, Beam2, Aerodynamic2DElem< iNN >, Aerodynamic2DElem< 1 >, Aerodynamic2DElem< 2 >, Aerodynamic2DElem< 3 >, HBeam, Joint, AerodynamicModal, Inertia, GenericAerodynamicForce, AirProperties, VariableBody, Force, Membrane, CyclocopterInflow, Shell, Mass, HydraulicElem, AutomaticStructDispElem, AircraftInstruments, Genel, Gravity, Bulk, NestedElem, Electric, StreamOutElem, JointRegularization, Thermal, and UserDefinedElem.
Referenced by DataManager::AfterPredict(), AssJac(), AerodynamicBody::AssJac(), DataManager::AssJac(), AerodynamicBeam::AssJac(), AerodynamicBeam2::AssJac(), AssMats(), AssRes(), DataManager::AssRes(), DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), AerodynamicBody::AssVec(), AerodynamicBeam::AssVec(), AerodynamicBeam2::AssVec(), Elem2Param::Bind(), StrainGageParam::Bind(), DataManager::Cast(), DataManager::DofOwnerInit(), DataManager::DofOwnerSet(), ElemPrivPlugIn::Err(), GetDofType(), NestedElem::GetElemType(), DataManager::IDDofOwnerSet(), DataManager::InitialJointAssembly(), DataManager::ReadElems(), and PrivDriveCaller::Restart().
| unsigned Elem::GetInverseDynamicsFlags | ( | void | ) | const |
Definition at line 77 of file elem.cc.
References m_uInverseDynamicsFlags.
Referenced by Joint::bIsPrescribedMotion(), and Joint::bIsTorque().
|
inlinevirtual |
Reimplemented in LoadableElem, AeroDynModule, AirProperties, NestedElem, and Gravity.
Definition at line 234 of file elem.h.
References GetConnectedNodes().
Referenced by NestedElem::GetNumConnectedNodes().

|
virtual |
Implements SimulationEntity.
Reimplemented in PetersHeRotor, DynamicInflowRotor, Flow_valve, PlanePinJoint, Pressure_valve, GenelMass, AxialRotationJoint, Pressure_flow_control_valve, ModuleIMUConstraint, Wheel4, TotalPinJoint, Shell4EASANS, DiscreteControlElem, TotalReaction, Shell4EAS, Dynamic_control_valve, Modal, ClampJoint, UniversalPinJoint, DynamicPipe, PlaneRotationJoint, LoadableElem, DriveDisplacementPinJoint, Membrane4EAS, Aerodynamic2DElem< iNN >, Aerodynamic2DElem< 1 >, Aerodynamic2DElem< 2 >, Aerodynamic2DElem< 3 >, Orifice, Control_valve2, AeroDynModule, InPlaneWithOffsetJoint, RotAccel, PinJoint, UniversalRotationJoint, Tank, DistanceJointWithOffset, Dynamic_pipe, AngularVelocityJoint, InLineWithOffsetJoint, GenelStateSpaceMIMO, InducedVelocity, ModuleNonsmoothNode, BeamSliderJoint, AngularAccelerationJoint, AerodynamicModal, DeformableJoint, DeformableHingeJoint, ThreeWayMinorLoss, TotalJoint, TranslAccel, ModuleFMU, DeformableDispJoint, DeformableAxialJoint, TotalEquation, GenelDistance, Motor, Brake, PlaneHingeJoint, RotorTrimBase, Accumulator, LoadIncNorm, DriveHingeJoint, Rod, ViscousBody, PointSurfaceContact, RodBezier, NestedElem, Actuator, DriveDisplacementJoint, asynchronous_machine, ContactJoint, GimbalRotationJoint, Control_valve, Pipe, InPlaneJoint, InPlaneContactJoint, SphericalHingeJoint, UniversalHingeJoint, PrismaticJoint, GenelStateSpaceSISO, MinorLoss, LinearVelocityJoint, ModuleMDS, LinearAccelerationJoint, InlineFriction, DistanceJoint, Accelerometer, InLineJoint, and GenelClamp.
Definition at line 118 of file elem.cc.
Referenced by DataManager::AssConstrJac(), DataManager::AssConstrRes(), DrivenElem::AssJac(), TikhonovRegularization::AssJac(), DynamicRegularization::AssJac(), JacobianRegularization::AssJac(), DrivenElem::AssMats(), DrivenElem::AssRes(), TikhonovRegularization::AssRes(), DynamicRegularization::AssRes(), DataManager::DofOwnerInit(), DataManager::DofOwnerSet(), DataManager::IDDofOwnerSet(), DataManager::IDSetTest(), NestedElem::iGetNumDof(), ReadJointRegularization(), TikhonovRegularization::WorkSpaceDim(), DynamicRegularization::WorkSpaceDim(), and JacobianRegularization::WorkSpaceDim().
|
pure virtual |
Implemented in PetersHeRotor, FollowerInternalCouple, AbsoluteInternalCouple, DynamicInflowRotor, LoadIncForce, FollowerInternalForce, Flow_valve, PlanePinJoint, TotalForce, AbsoluteInternalForce, ManglerRotor, AerodynamicBeam2, Pressure_valve, GenelMass, GlauertRotor, TimeStep, FollowerCouple, AxialRotationJoint, ModuleIMUConstraint, AerodynamicBeam, GenelSpringDamperSupport, Pressure_flow_control_valve, AbsoluteCouple, Wheel4, Shell4EASANS, GenelCrossSpringDamperSupport, TotalPinJoint, Shell4EAS, Body, UniformRotor, DiscreteControlElem, Beam, FollowerForce, TotalReaction, AerodynamicBody, GenelCrossSpringSupport, RodWithOffset, Dynamic_control_valve, Modal, ClampJoint, UniversalPinJoint, LoadableElem, DynamicPipe, PlaneRotationJoint, NoRotor, AbsoluteForce, RotorTrimGeneric, GenelSpringSupport, Membrane4EAS, DriveDisplacementPinJoint, Beam2, AbstractInternalForce, AutomaticStructElem, HBeam, Orifice, PiezoActuatorVEBeam, Joint, PiezoActuatorVEBeam2, CentralGravity, AeroDynModule, Control_valve2, ModuleNonsmoothNode, InPlaneWithOffsetJoint, RotAccel, GenelSpring, PinJoint, RotorTrim, Tank, UniversalRotationJoint, DistanceJointWithOffset, GenelStateSpaceMIMO, Dynamic_pipe, AngularVelocityJoint, InLineWithOffsetJoint, AbstractForce, StdAirProperties, AngularAccelerationJoint, BeamSliderJoint, AerodynamicModal, Rotor, UniformGravity, ThreeWayMinorLoss, Inertia, AbsoluteInternalDispForce, DeformableJoint, TranslAccel, GenelDistance, TotalJoint, DeformableHingeJoint, Wheel2, Force, asynchronous_machine, ModuleFMU, GenericAerodynamicForce, TotalEquation, Motor, BufferStreamElemRaw, DeformableDispJoint, AirProperties, Brake, PlaneHingeJoint, LoadIncNorm, CyclocopterInflow, DeformableAxialJoint, Accumulator, HydrodynamicPlainBearing, BasicAirProperties, BulkSpringSupport, SwashPlate, Rod, Actuator, HydraulicElem, PointSurfaceContact, InlineFriction, PiezoActuatorBeam, PiezoActuatorBeam2, RodBezier, VariableBody, DriveHingeJoint, ViscousBody, BufferStreamElem, DriveDisplacementJoint, AutomaticStructDispElem, Control_valve, GimbalRotationJoint, GenelStateSpaceSISO, ModuleIMU, AircraftInstruments, Pipe, InPlaneJoint, InPlaneContactJoint, JointRegularization, SphericalHingeJoint, Genel, ModuleMDS, MinorLoss, DrivenElem, UniversalHingeJoint, LinearVelocityJoint, PrismaticJoint, LinearAccelerationJoint, ModuleTemplate, Electric, DistanceJoint, AbsoluteDispForce, RTMBDynOutElem, Accelerometer, GenelClamp, InLineJoint, DispMeasure, Thermal, and Mass.
Referenced by DrivenElem::Restart().
| void Elem::SetInverseDynamicsFlags | ( | unsigned | uIDF | ) |
Definition at line 71 of file elem.cc.
References m_uInverseDynamicsFlags.
Referenced by ReadBeam2(), and ReadBody().
Implemented in PetersHeRotor, FollowerInternalCouple, AbsoluteInternalCouple, DynamicInflowRotor, FollowerInternalForce, LoadIncForce, PlanePinJoint, Flow_valve, TotalForce, AbsoluteInternalForce, StaticBody, Pressure_valve, AxialRotationJoint, GenelMass, ModalBody, FollowerCouple, TimeStep, GenelSpringDamperSupport, Pressure_flow_control_valve, TotalPinJoint, ModuleIMUConstraint, DynamicBody, Shell4EASANS, AbsoluteCouple, TotalReaction, GenelCrossSpringDamperSupport, Shell4EAS, Wheel4, Beam, DiscreteControlElem, FollowerForce, GenelCrossSpringSupport, ClampJoint, Modal, RodWithOffset, Dynamic_control_valve, PlaneRotationJoint, UniversalPinJoint, DriveDisplacementPinJoint, DynamicPipe, LoadableElem, AutomaticStructElem, Membrane4EAS, GenelSpringSupport, AbsoluteForce, StaticVariableBody, Beam2, Aerodynamic2DElem< iNN >, Aerodynamic2DElem< 1 >, Aerodynamic2DElem< 2 >, Aerodynamic2DElem< 3 >, AbstractInternalForce, JacobianRegularization, HBeam, InducedVelocity, StaticMass, Orifice, PiezoActuatorVEBeam, InPlaneWithOffsetJoint, PiezoActuatorVEBeam2, Control_valve2, AeroDynModule, GenelSpring, PinJoint, RotAccel, ModalExt, UniversalRotationJoint, DistanceJointWithOffset, TotalJoint, Tank, GenelStateSpaceMIMO, TotalEquation, AngularVelocityJoint, InLineWithOffsetJoint, ModuleNonsmoothNode, Dynamic_pipe, AerodynamicModal, DynamicRegularization, BeamSliderJoint, AbstractForce, AngularAccelerationJoint, DeformableJoint, DynamicVariableBody, DeformableHingeJoint, PlaneHingeJoint, ThreeWayMinorLoss, DynamicMass, Inertia, AirProperties, AbsoluteInternalDispForce, DeformableDispJoint, StructMappingExtForce, AutomaticStructDispElem, TranslAccel, GenelDistance, DeformableAxialJoint, DriveHingeJoint, StructExtForce, Brake, DriveDisplacementJoint, GenericAerodynamicForce, Motor, RotorTrimBase, NestedElem, PointSurfaceContact, ModalMappingExt, Accumulator, ViscousBody, SwashPlate, BulkSpringSupport, TikhonovRegularization, Rod, Wheel2, asynchronous_machine, RodBezier, Actuator, GimbalRotationJoint, ModuleFMU, AircraftInstruments, Gravity, PiezoActuatorBeam, PiezoActuatorBeam2, ContactJoint, InPlaneJoint, GenelStateSpaceSISO, InPlaneContactJoint, SphericalHingeJoint, Control_valve, PrismaticJoint, UniversalHingeJoint, LoadIncNorm, Pipe, DistanceJoint, LinearVelocityJoint, InlineFriction, MinorLoss, InLineJoint, LinearAccelerationJoint, ModalForce, Accelerometer, GenelClamp, StreamOutElem, AbsoluteDispForce, HydrodynamicPlainBearing, DispMeasure, ModuleIMU, ModuleMDS, ModuleTemplate, ThermalResistance, ThermalCapacitance, and ThermalSource.
Referenced by ElasticAxialJoint::AssJac(), ViscoElasticRod::AssJac(), ElasticHingeJoint::AssJac(), AerodynamicBody::AssJac(), ViscousAxialJoint::AssJac(), AerodynamicBeam::AssJac(), ViscousHingeJoint::AssJac(), ViscoElasticAxialJoint::AssJac(), AerodynamicBeam2::AssJac(), ViscoElasticHingeJoint::AssJac(), ElasticAxialJoint::AssMats(), ElasticDispJoint::AssMats(), ElasticHingeJoint::AssMats(), ElasticJoint::AssMats(), ElasticDispJointInv::AssMats(), ViscousAxialJoint::AssMats(), ElasticJointInv::AssMats(), ViscousHingeJoint::AssMats(), ViscoElasticAxialJoint::AssMats(), ViscoElasticHingeJoint::AssMats(), ElasticAxialJoint::AssRes(), ElasticDispJoint::AssRes(), ViscoElasticRod::AssRes(), ElasticHingeJoint::AssRes(), AerodynamicBody::AssRes(), ElasticDispJointInv::AssRes(), ViscousAxialJoint::AssRes(), AerodynamicBeam::AssRes(), ViscousHingeJoint::AssRes(), ViscousDispJoint::AssRes(), ViscoElasticAxialJoint::AssRes(), AerodynamicBeam2::AssRes(), ViscoElasticDispJoint::AssRes(), ViscoElasticHingeJoint::AssRes(), DataManager::ElemAssInit(), AerodynamicBody::InitialAssRes(), and NestedElem::WorkSpaceDim().
|
private |
Definition at line 81 of file elem.h.
Referenced by bIsErgonomy(), bIsRightHandSide(), GetInverseDynamicsFlags(), and SetInverseDynamicsFlags().
 1.8.7
1.8.7 
