|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
#include <mbpar.h>

Classes | |
| class | ErrGeneric |
| class | ErrReferenceAlreadyDefined |
| class | ErrReferenceUndefined |
| class | Manip |
| class | RefTplManip |
| class | RefVec3Manip |
| class | TplManip |
| class | VecAbsManip |
| class | VecRelManip |
Public Types | |
| enum | Frame { UNKNOWNFRAME = 0, GLOBAL, NODE, LOCAL, REFERENCE, OTHER_POSITION, OTHER_ORIENTATION, OTHER_NODE, LASTFRAME } |
| enum | VecMatOpType { VM_NONE = 0, VM_POSABS, VM_VELABS, VM_OMEABS, VM_VECABS, VM_UNITVECABS, VM_MATABS, VM_ROTABS, VM_MOD_REL = 0x1000U, VM_MOD_OTHER = 0x2000U, VM_POSREL = VM_POSABS | VM_MOD_REL, VM_VELREL = VM_VELABS | VM_MOD_REL, VM_OMEREL = VM_OMEABS | VM_MOD_REL, VM_VECREL = VM_VECABS | VM_MOD_REL, VM_UNITVECREL = VM_UNITVECABS | VM_MOD_REL, VM_MATREL = VM_MATABS | VM_MOD_REL, VM_ROTREL = VM_ROTABS | VM_MOD_REL, VM_LAST } |
| typedef std::map< unsigned, const ReferenceFrame * > | RFType |
| typedef std::map< unsigned, const HydraulicFluid * > | HFType |
| typedef std::map< unsigned, C81Data * > | ADType |
| typedef std::map< unsigned, const DriveCaller * > | DCType |
| typedef std::map< unsigned, const TplDriveCaller < doublereal > * > | DC1DType |
| typedef std::map< unsigned, const TplDriveCaller< Vec3 > * > | DC3DType |
| typedef std::map< unsigned, const TplDriveCaller< Vec6 > * > | DC6DType |
| typedef std::map< unsigned, const TplDriveCaller< Mat3x3 > * > | DC3x3DType |
| typedef std::map< unsigned, const TplDriveCaller< Mat6x6 > * > | DC6x6DType |
 Public Types inherited from HighParser Public Types inherited from HighParser | |
| enum | Token { UNKNOWN = -1, DESCRIPTION, FIRSTARG, ARG, LASTARG, NOARGS, WORD, NUMBER, STRING, ENDOFFILE, LASTITEM } |
| enum | Delims { UNKNOWNDELIM = -1, PLAINBRACKETS, SQUAREBRACKETS, CURLYBRACKETS, SINGLEQUOTE, DOUBLEQUOTE, DEFAULTDELIM, LASTDELIM } |
| enum | { NONE = 0x00U, EATSPACES = 0x01U, ESCAPE = 0x02U, LOWER = 0x04U, UPPER = 0x08U } |
Public Member Functions | |
| const RFType & | GetReferenceFrameContainer (void) const |
| const HFType & | GetHydraulicFluidContainer (void) const |
| const ADType & | GetC81DataContainer (void) const |
| const DCType & | GetDriveCallerContainer (void) const |
| const DC1DType & | GetDriveCaller1DContainer (void) const |
| const DC3DType & | GetDriveCaller3DContainer (void) const |
| const DC6DType & | GetDriveCaller6DContainer (void) const |
| const DC3x3DType & | GetDriveCaller3x3DContainer (void) const |
| const DC6x6DType & | GetDriveCaller6x6DContainer (void) const |
| void | PopManip (void) |
| void | PushManip (const Manip *) |
| const Manip * | GetManip (void) const |
| bool | bEmptyManip (void) const |
| MBDynParser (MathParser &MP, InputStream &streamIn, const char *initial_file) | |
| ~MBDynParser (void) | |
| void | SetDataManager (DataManager *pdm) |
| DataManager * | GetDataManager (void) const |
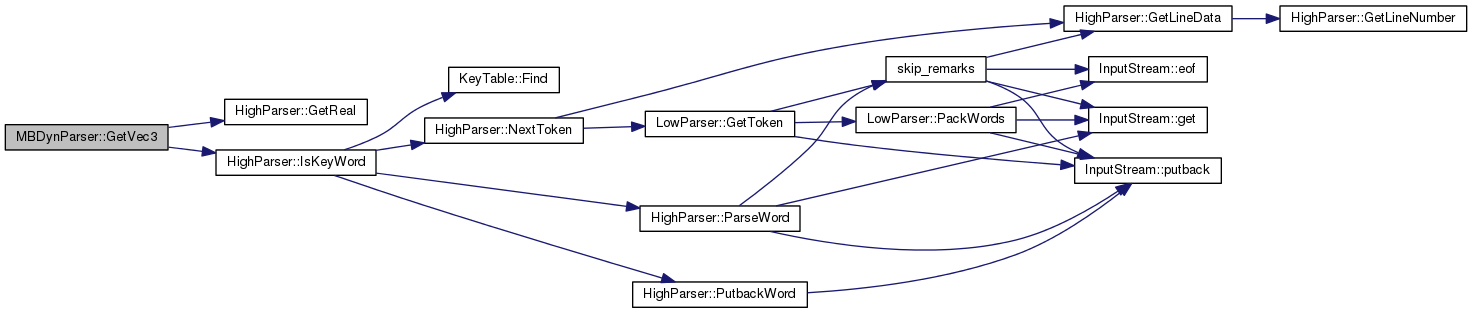
| virtual Vec3 | GetVec3 (void) |
| virtual Vec3 | GetVec3 (const Vec3 &vDef) |
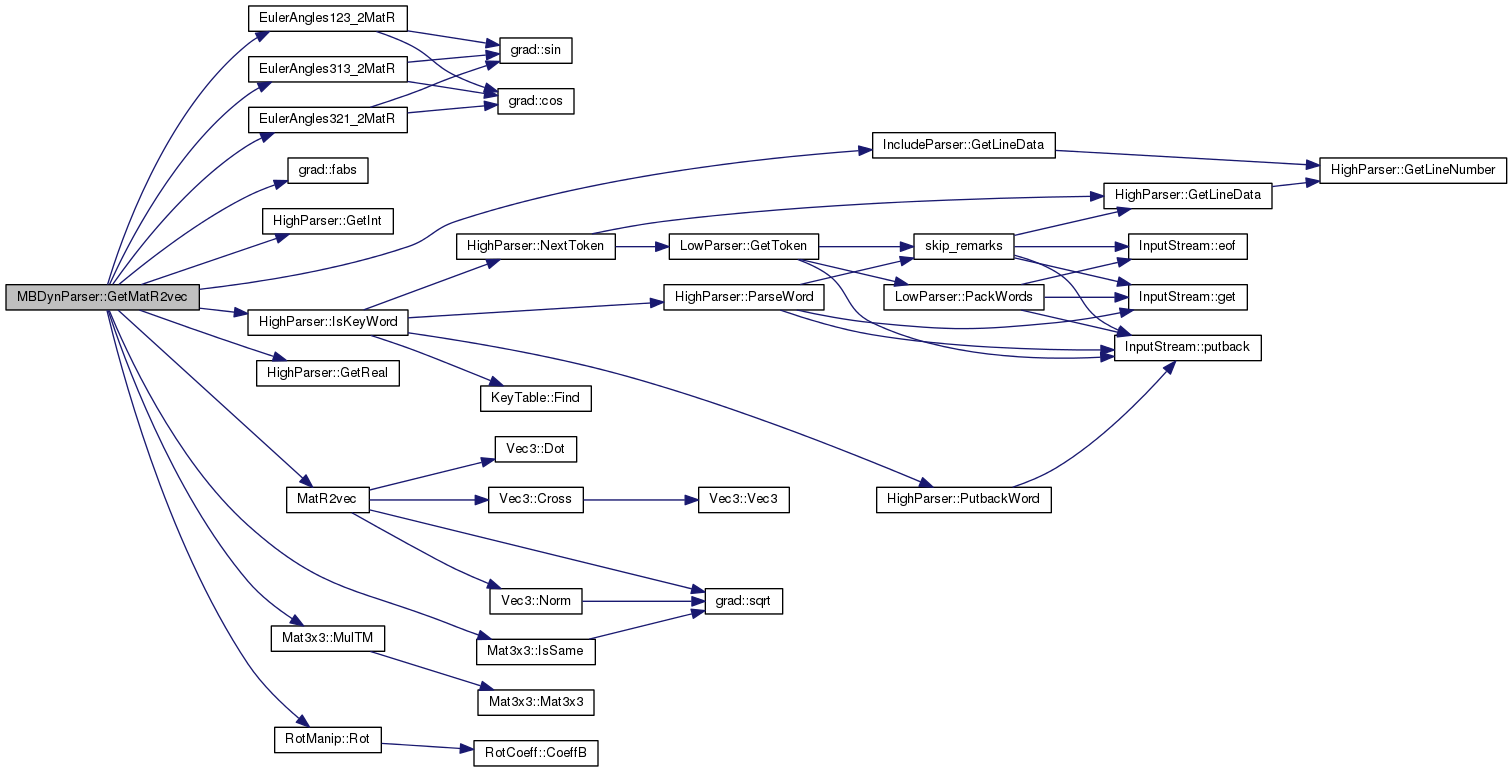
| virtual Mat3x3 | GetMatR2vec (void) |
| virtual Mat3x3 | GetMat3x3Sym (void) |
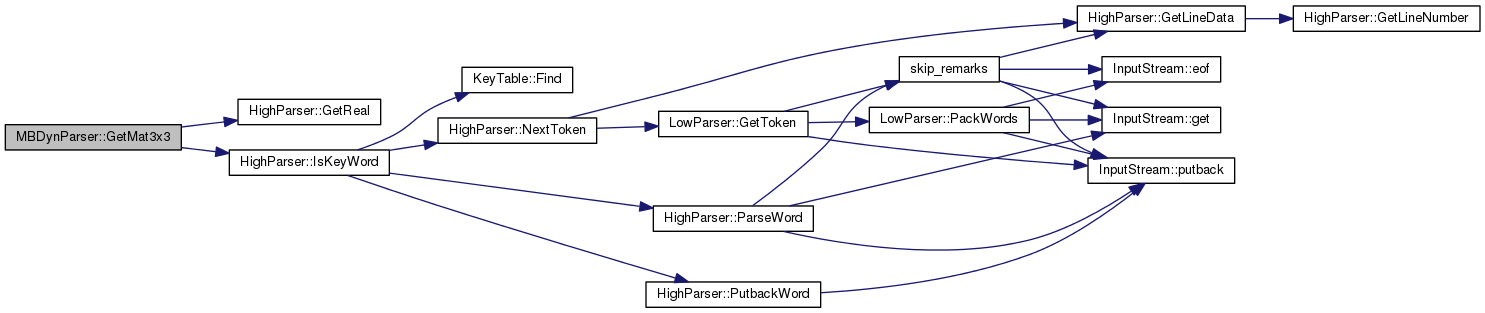
| virtual Mat3x3 | GetMat3x3 (void) |
| virtual Mat3x3 | GetMat3x3 (const Mat3x3 &mDef) |
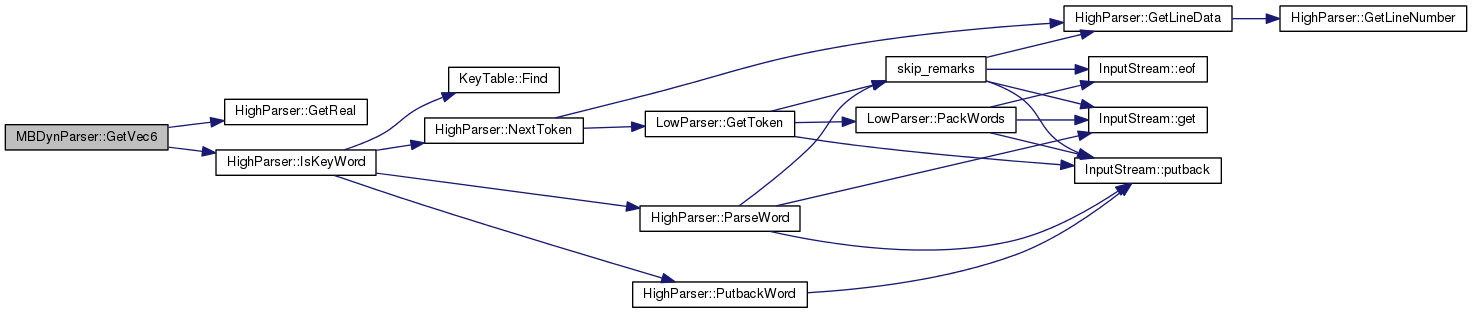
| virtual Vec6 | GetVec6 (void) |
| virtual Vec6 | GetVec6 (const Vec6 &vDef) |
| virtual Mat6x6 | GetMat6x6 (void) |
| virtual Mat6x6 | GetMat6x6 (const Mat6x6 &mDef) |
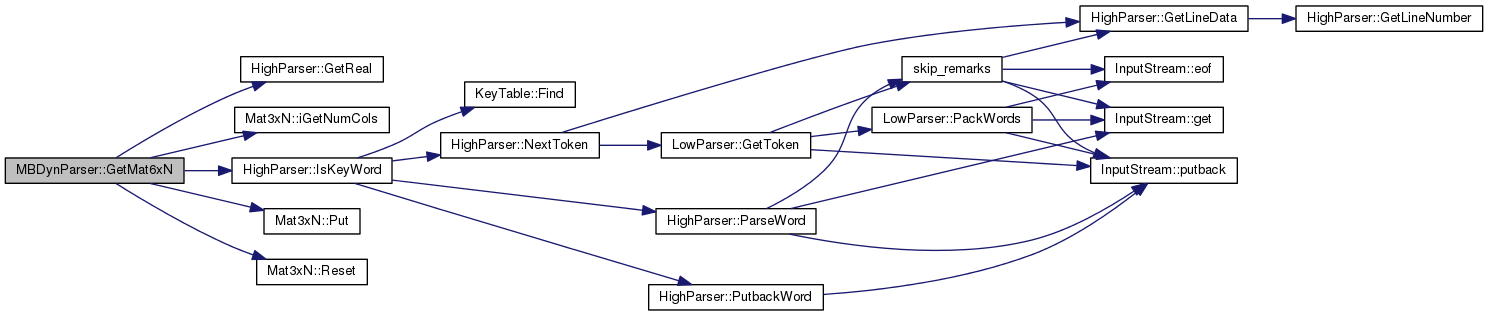
| virtual void | GetMat6xN (Mat3xN &m1, Mat3xN &m2, integer iNumCols) |
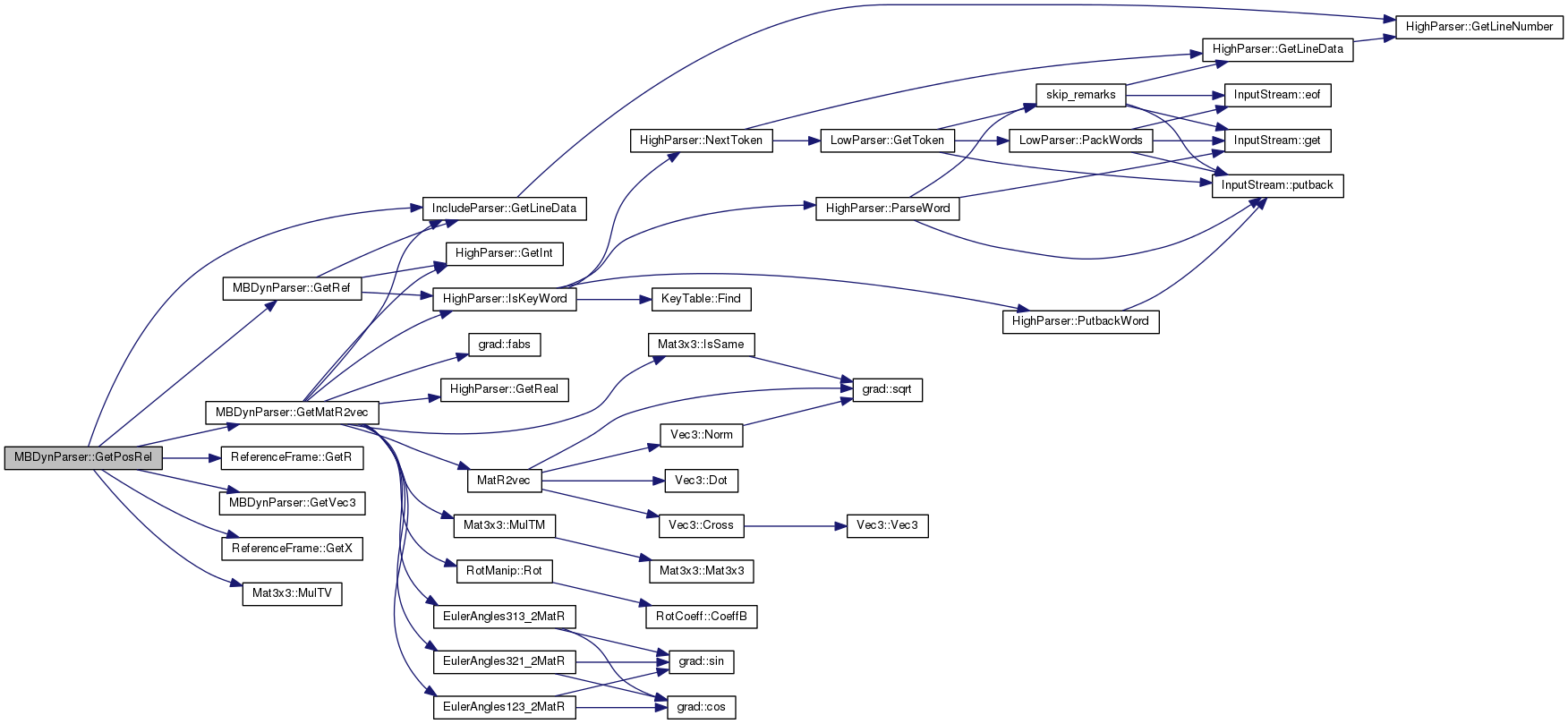
| Vec3 | GetPosRel (const ReferenceFrame &rf) |
| Vec3 | GetPosRel (const ReferenceFrame &rf, const ReferenceFrame &other_rf, const Vec3 &other_X) |
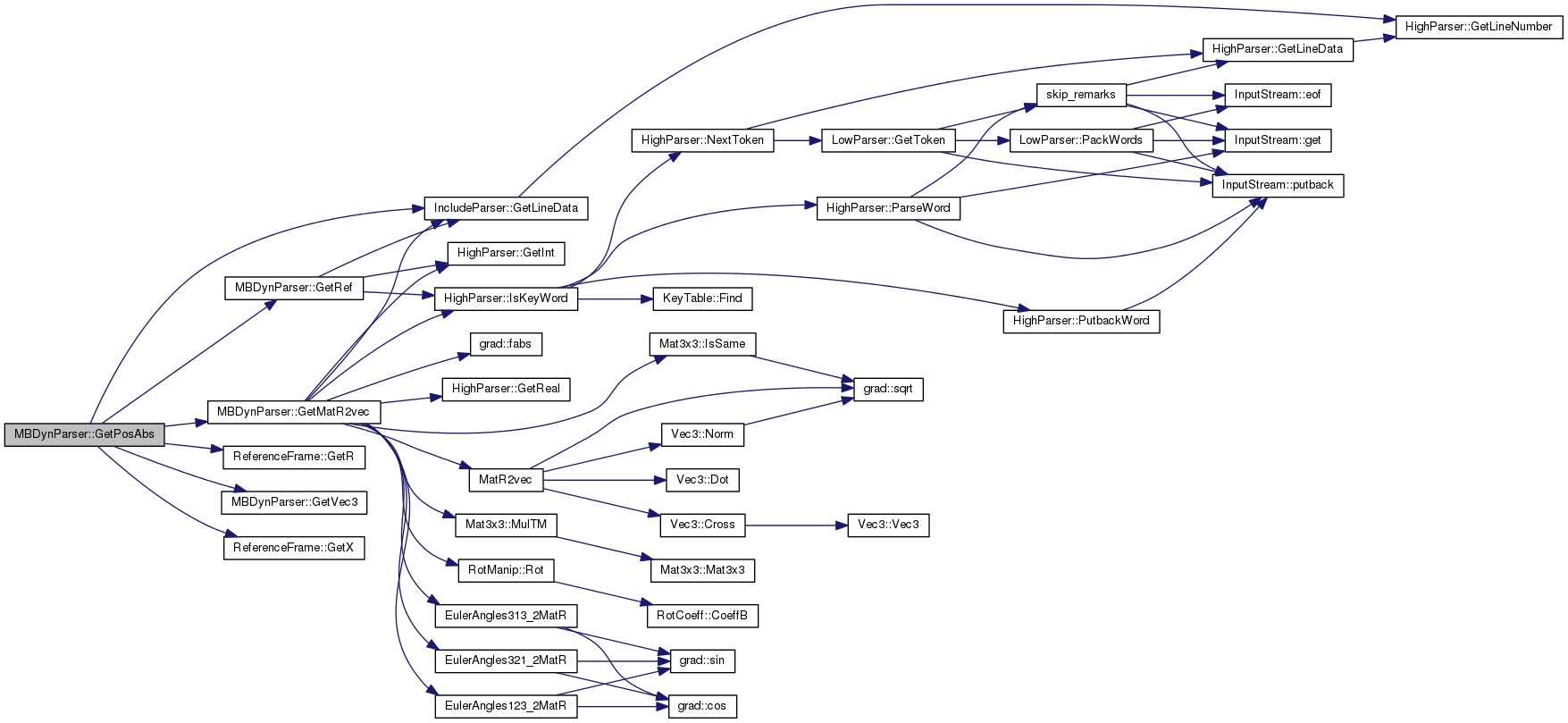
| Vec3 | GetPosAbs (const ReferenceFrame &rf) |
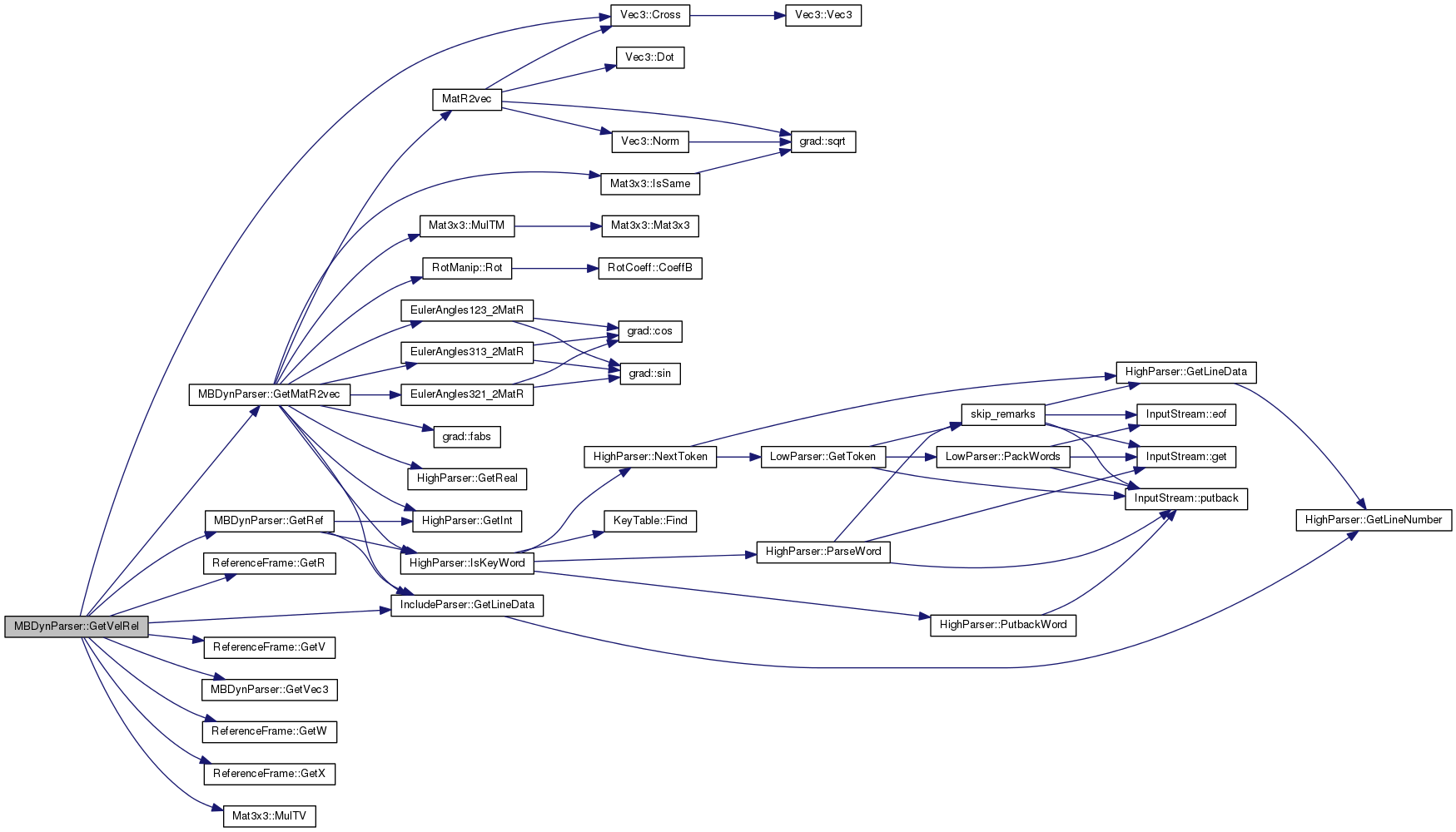
| Vec3 | GetVelRel (const ReferenceFrame &rf, const Vec3 &x) |
| Vec3 | GetVelAbs (const ReferenceFrame &rf, const Vec3 &x) |
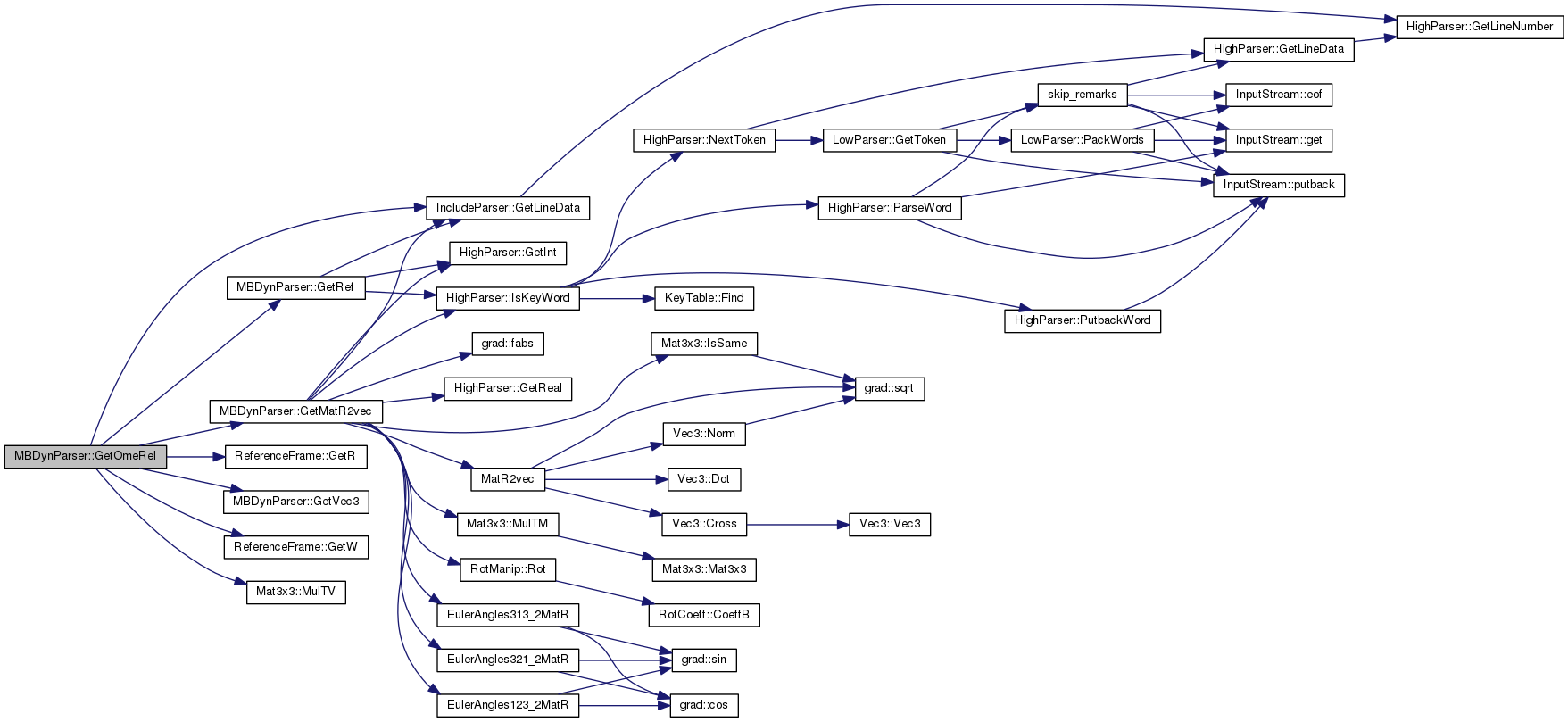
| Vec3 | GetOmeRel (const ReferenceFrame &rf) |
| Vec3 | GetOmeAbs (const ReferenceFrame &rf) |
| Vec3 | GetVecRel (const ReferenceFrame &rf) |
| Vec3 | GetVecAbs (const ReferenceFrame &rf) |
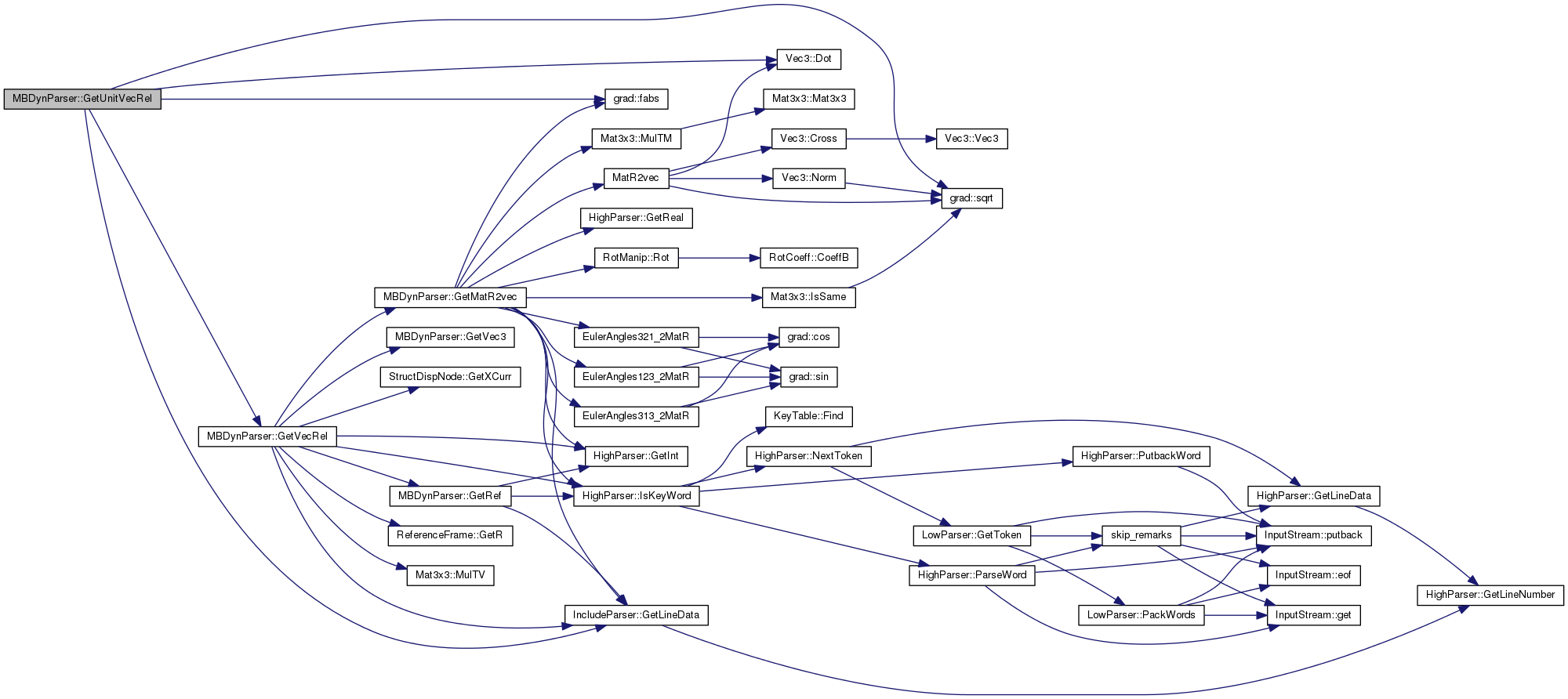
| Vec3 | GetUnitVecRel (const ReferenceFrame &rf) |
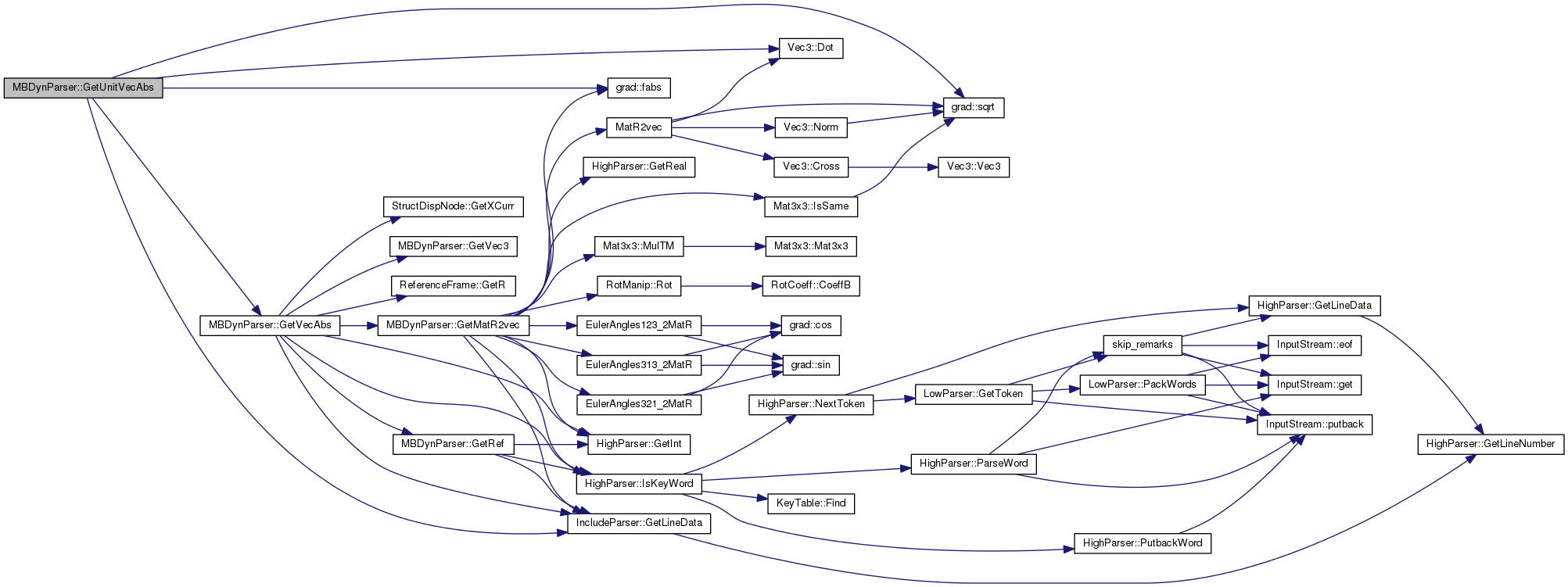
| Vec3 | GetUnitVecAbs (const ReferenceFrame &rf) |
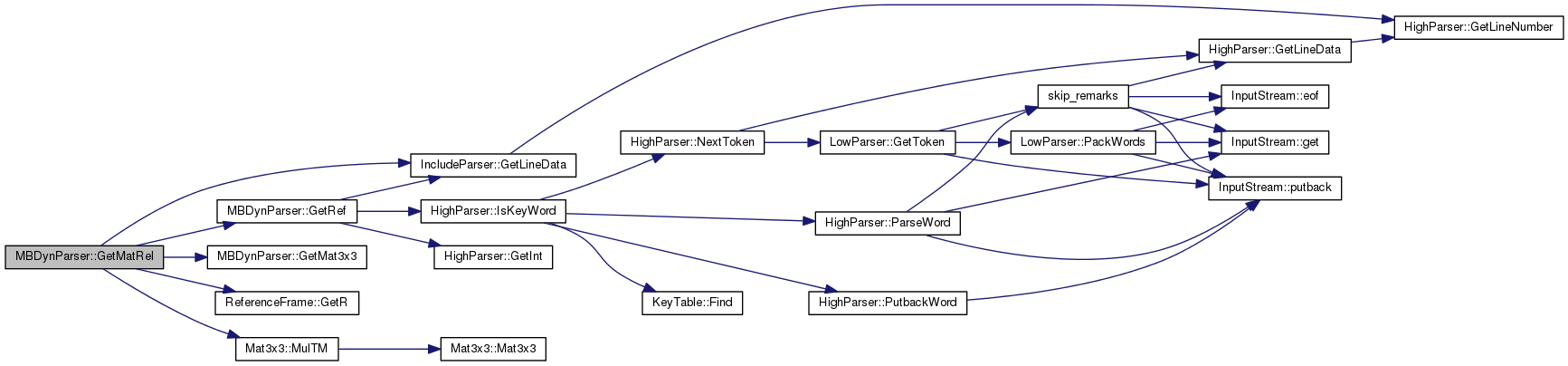
| Mat3x3 | GetMatRel (const ReferenceFrame &rf) |
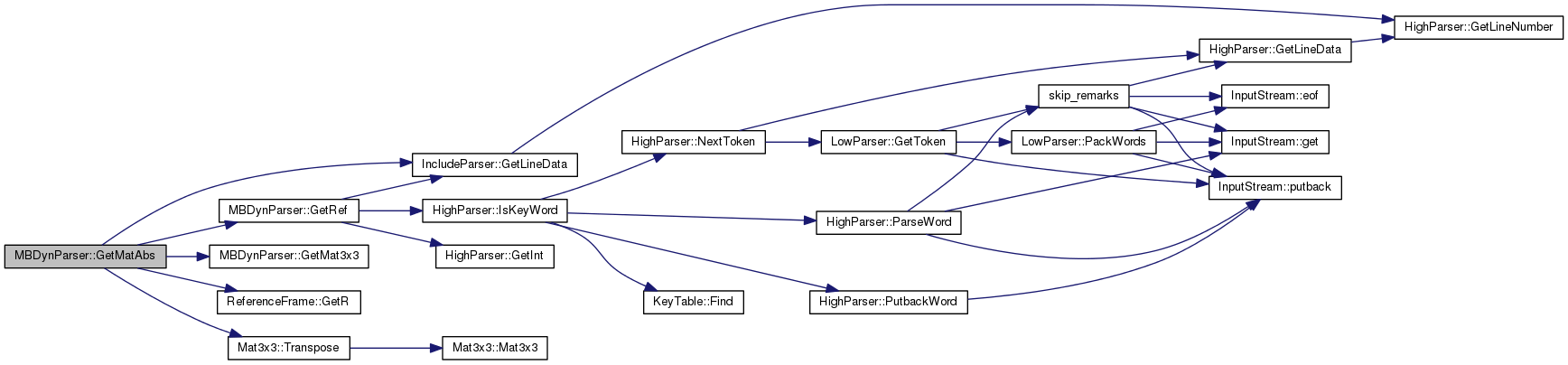
| Mat3x3 | GetMatAbs (const ReferenceFrame &rf) |
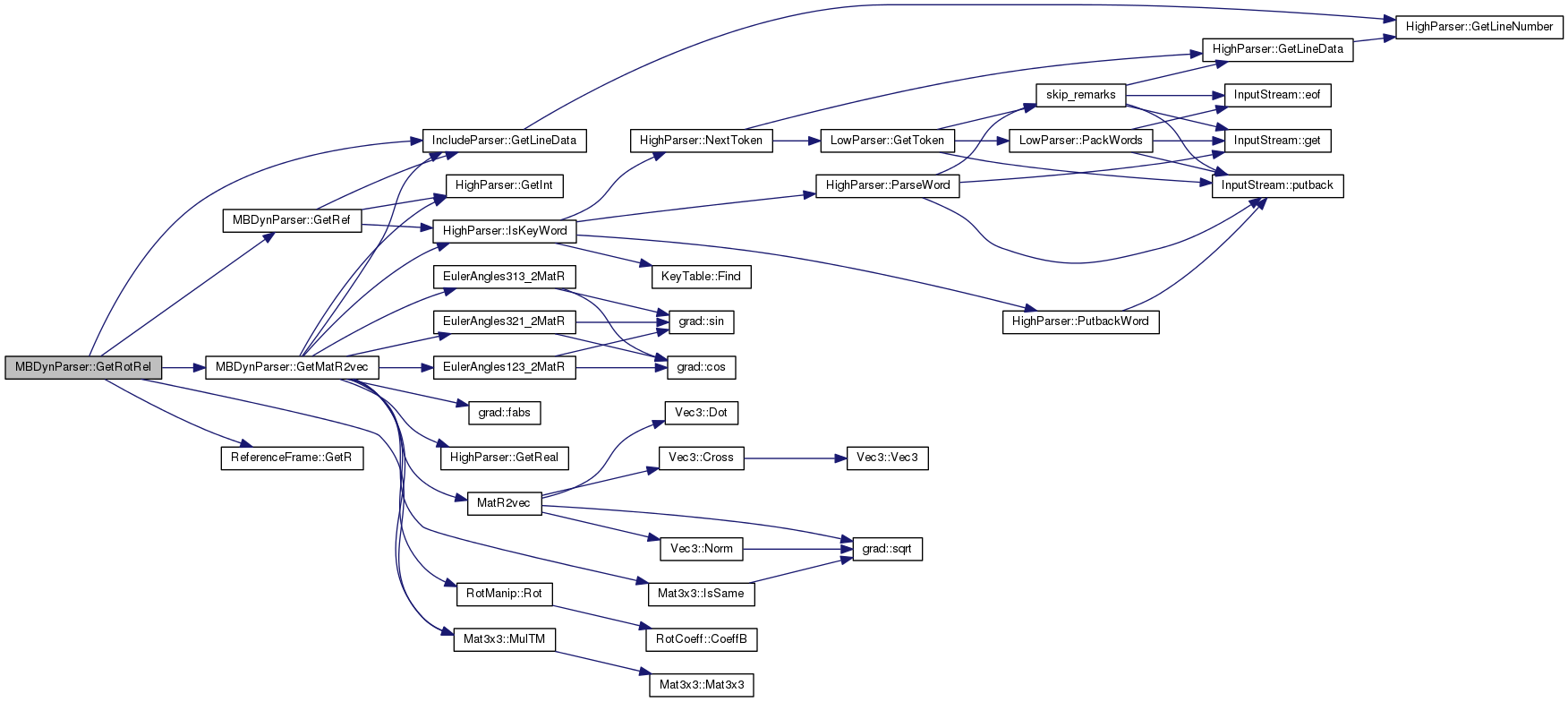
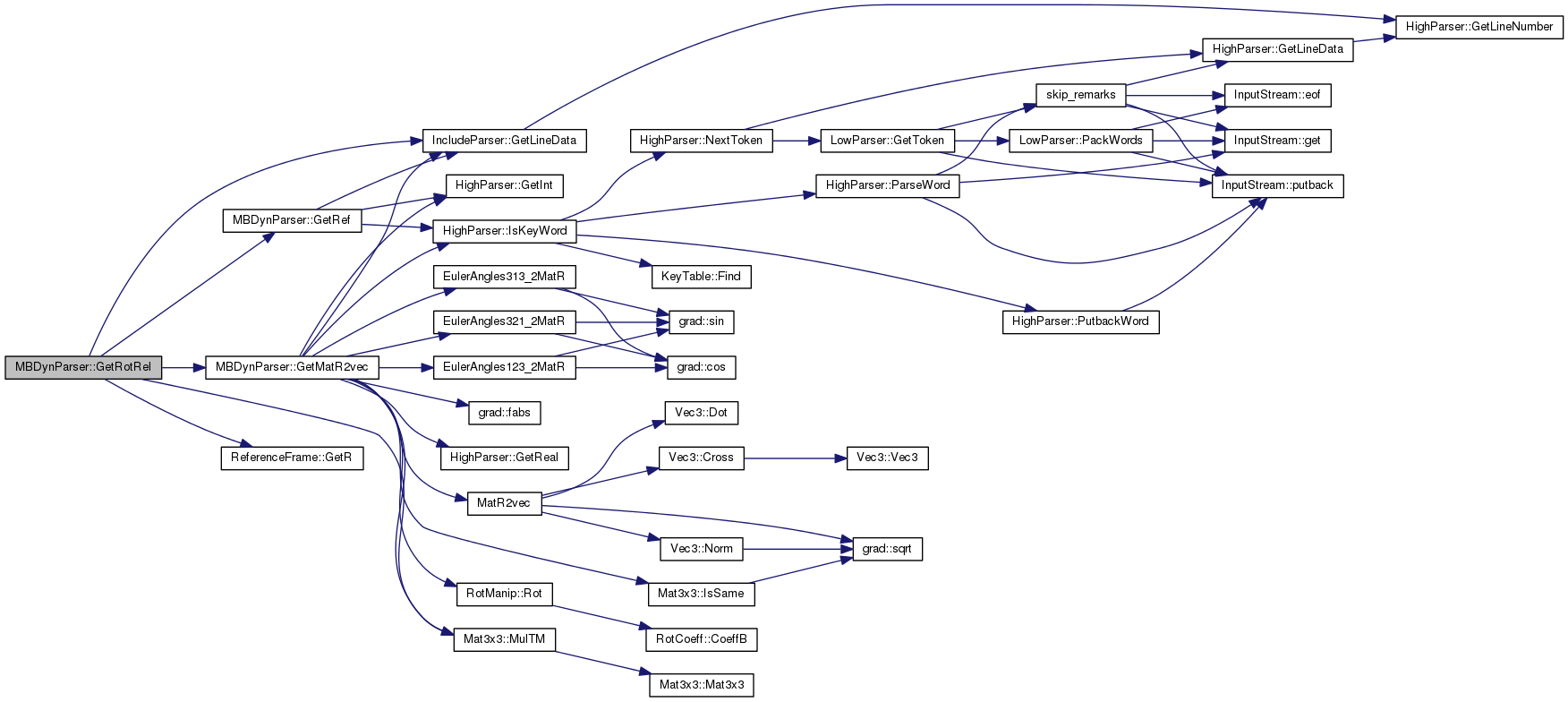
| Mat3x3 | GetRotRel (const ReferenceFrame &rf) |
| Mat3x3 | GetRotRel (const ReferenceFrame &rf, const ReferenceFrame &other_rf, const Mat3x3 &other_R) |
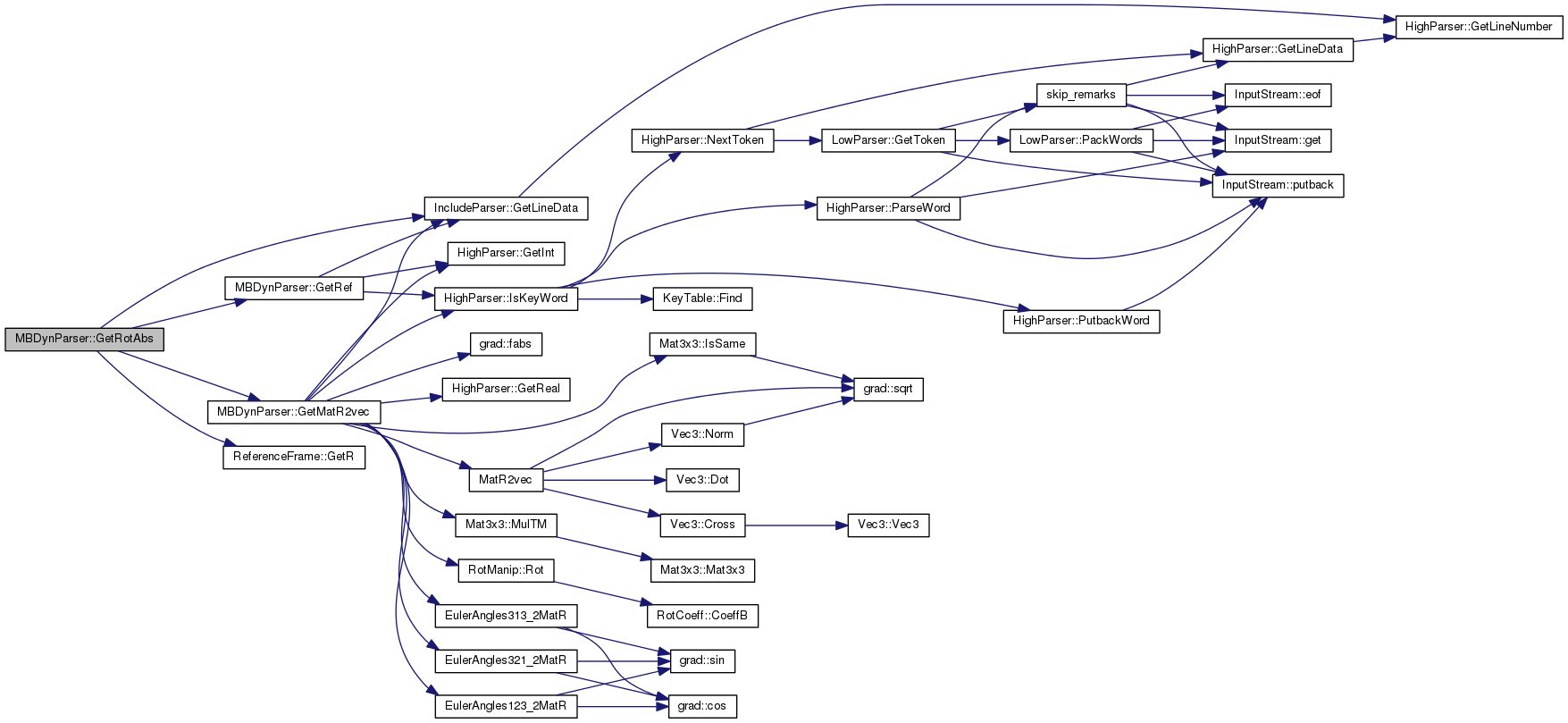
| Mat3x3 | GetRotAbs (const ReferenceFrame &rf) |
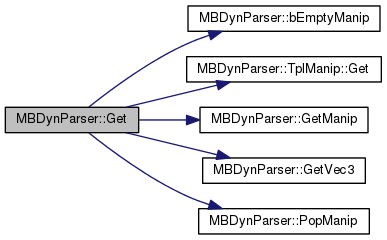
| virtual doublereal | Get (const doublereal &d) |
| virtual Vec3 | Get (const Vec3 &v) |
| virtual Mat3x3 | Get (const Mat3x3 &m) |
| virtual Vec6 | Get (const Vec6 &v) |
| virtual Mat6x6 | Get (const Mat6x6 &m) |
| void | OutputFrames (std::ostream &out) const |
| HydraulicFluid * | GetHydraulicFluid (void) |
| const c81_data * | GetC81Data (unsigned profile) const |
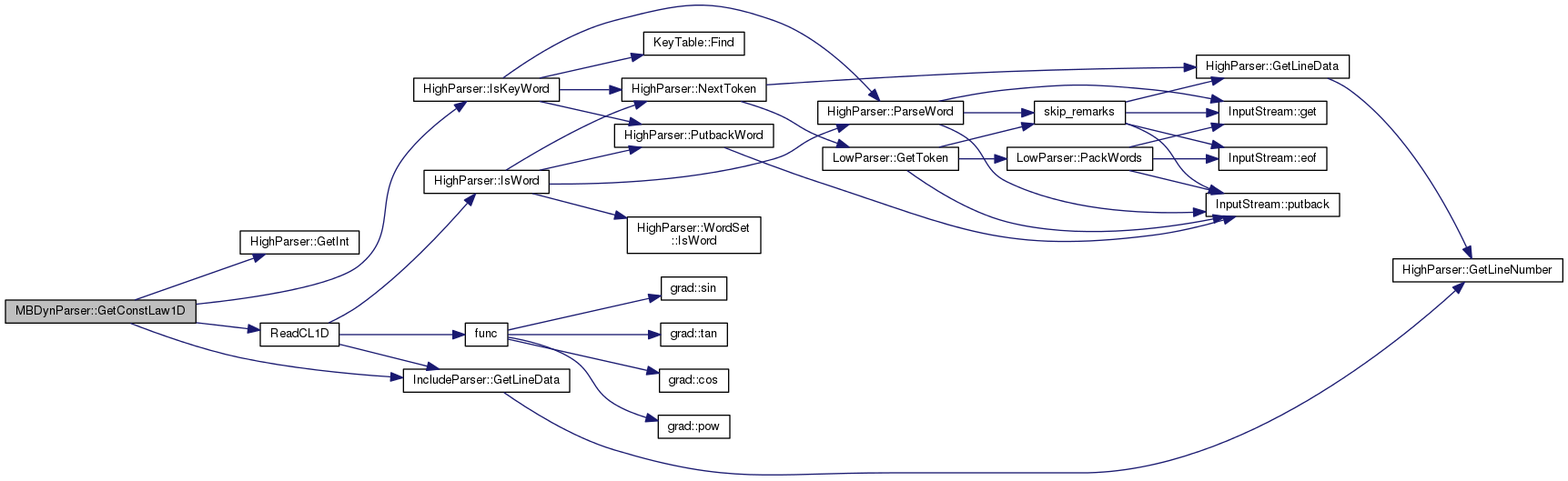
| ConstitutiveLaw1D * | GetConstLaw1D (ConstLawType::Type &clt) |
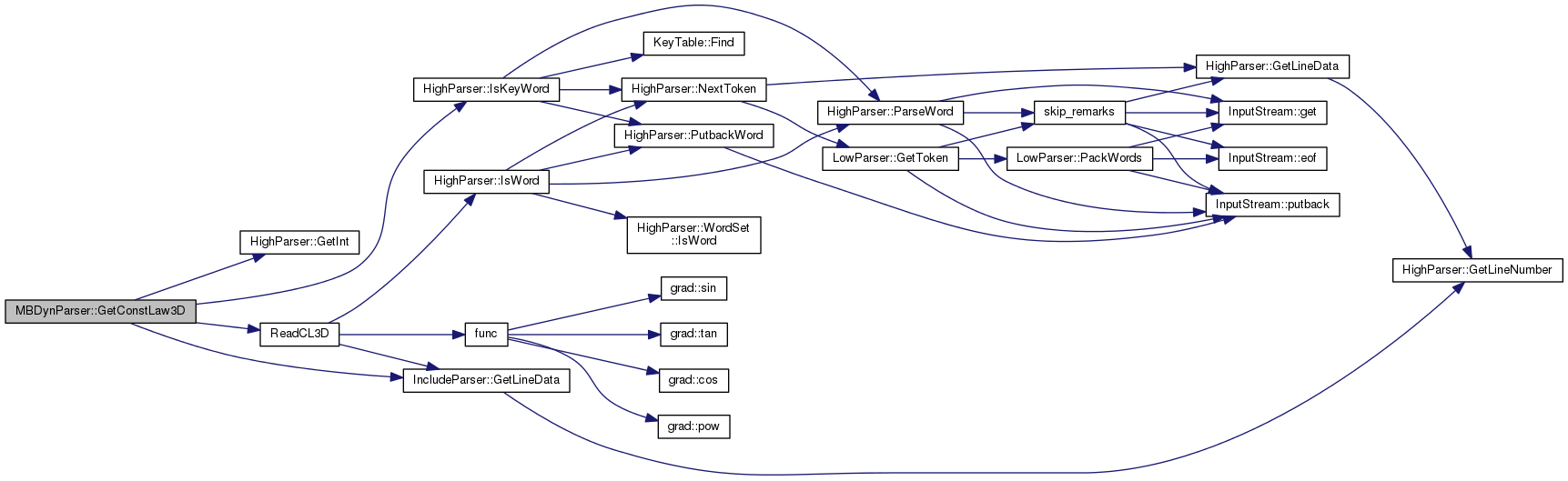
| ConstitutiveLaw3D * | GetConstLaw3D (ConstLawType::Type &clt) |
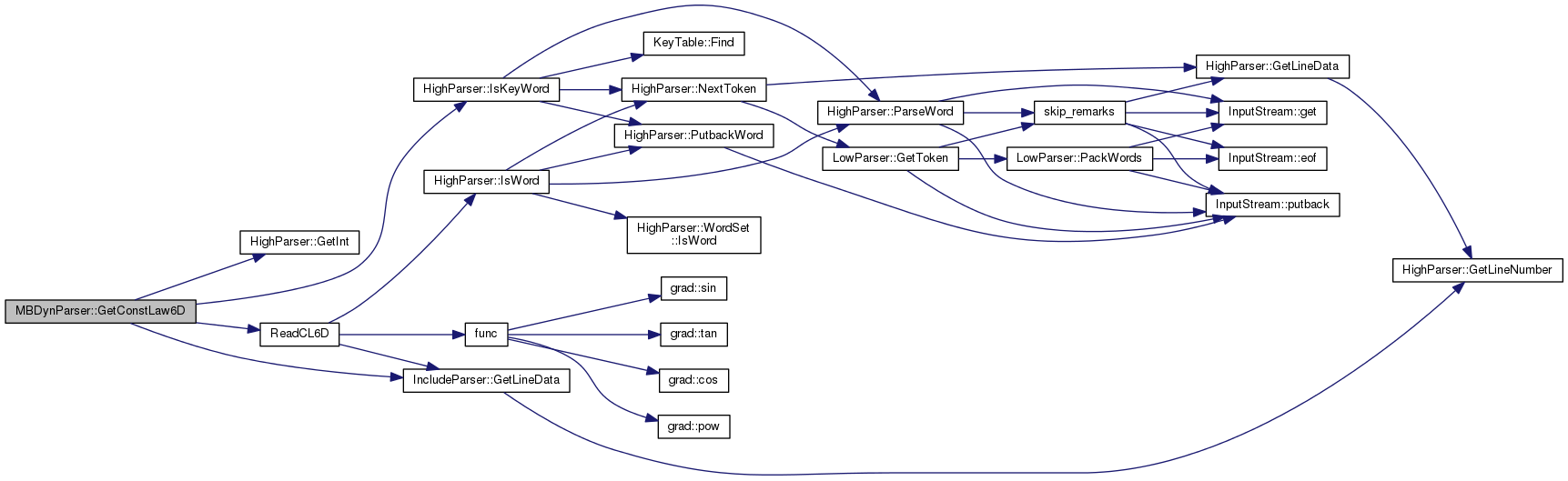
| ConstitutiveLaw6D * | GetConstLaw6D (ConstLawType::Type &clt) |
| const DriveCaller * | GetDrive (unsigned uLabel) const |
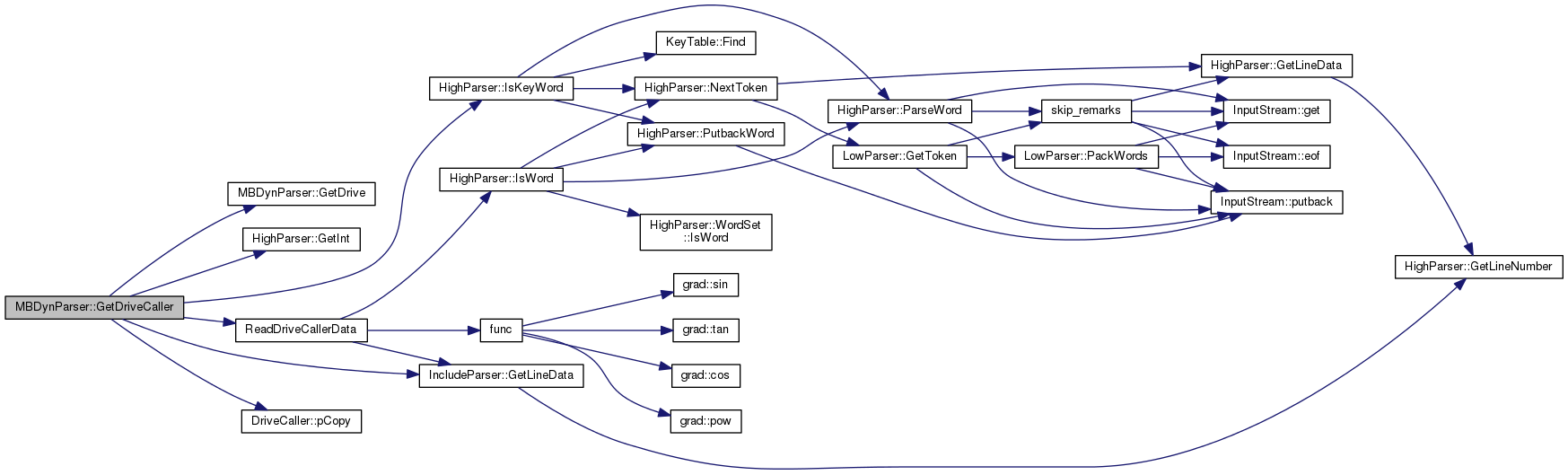
| DriveCaller * | GetDriveCaller (bool bDeferred=false) |
| template<class T > | |
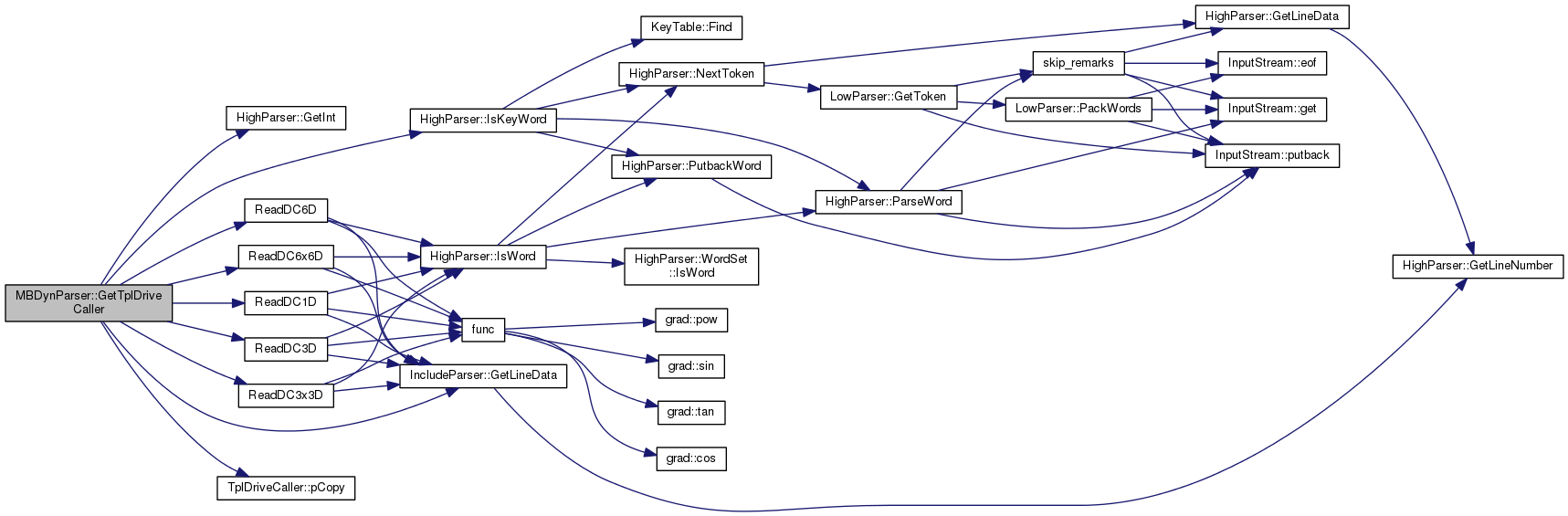
| const TplDriveCaller< T > * | GetTplDrive (unsigned uLabel) const |
| template<class T > | |
| TplDriveCaller< T > * | GetTplDriveCaller (void) |
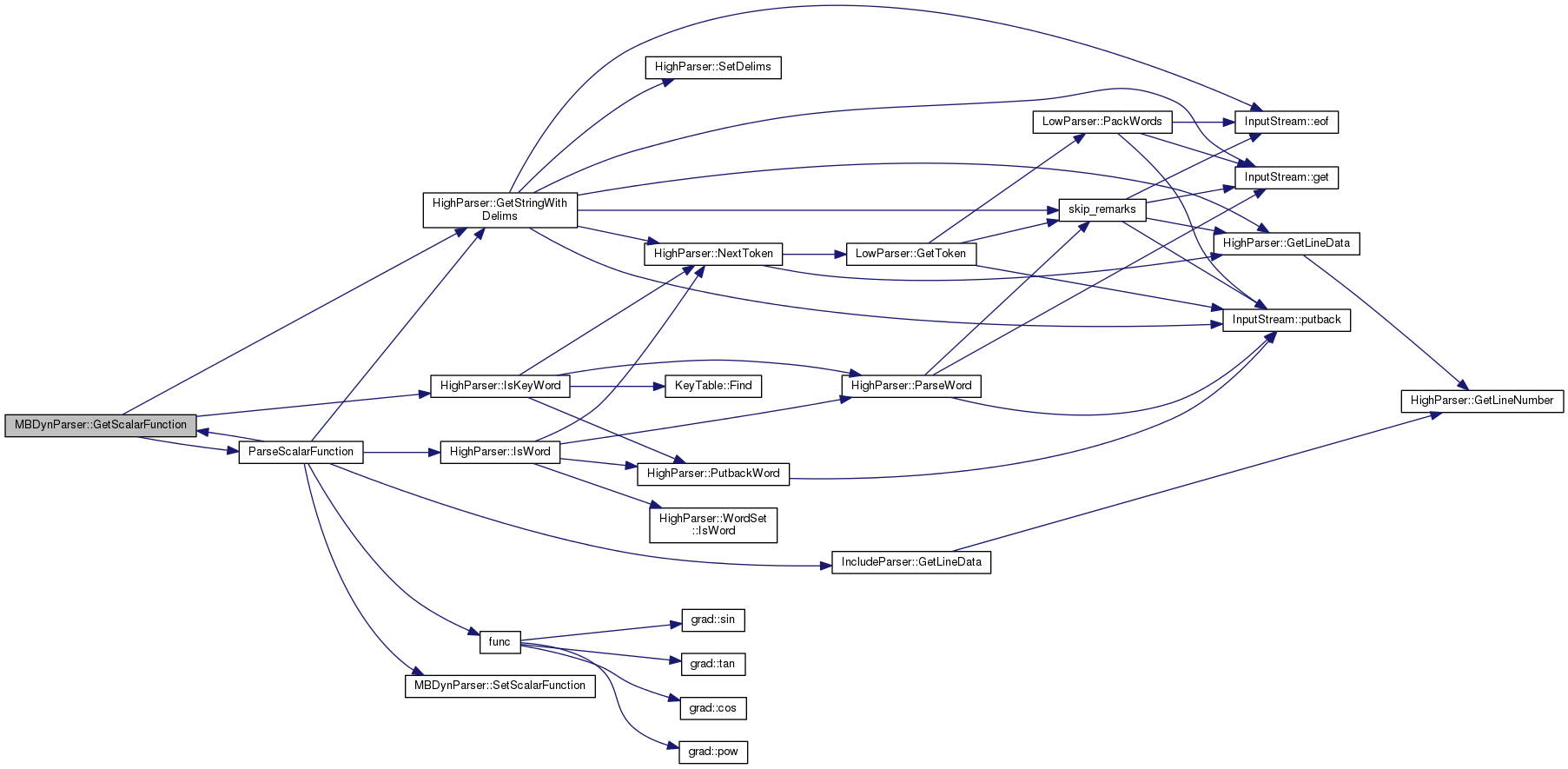
| const BasicScalarFunction * | GetScalarFunction (void) |
| const BasicScalarFunction * | GetScalarFunction (const std::string &s) |
| bool | SetScalarFunction (const std::string &s, const BasicScalarFunction *sf) |
| Public Member Functions inherited from IncludeParser | |
| IncludeParser (MathParser &MP, InputStream &streamIn, const char *initial_file="initial file") | |
| virtual | ~IncludeParser (void) |
| virtual void | Close (void) |
| virtual const char * | GetFileName (enum Delims Del=DEFAULTDELIM) |
| virtual HighParser::ErrOut | GetLineData (void) const |
| Public Member Functions inherited from HighParser | |
| HighParser (MathParser &MP, InputStream &streamIn) | |
| virtual | ~HighParser (void) |
| virtual const KeyTable * | PutKeyTable (const KeyTable &KT) |
| virtual int | GetLineNumber (void) const |
| virtual MathParser & | GetMathParser (void) |
| bool | IsDescription (void) const |
| Token | GotDescription (void) |
| int | GetDescription (void) |
| virtual void | ExpectDescription (void) |
| virtual void | ExpectArg (void) |
| virtual bool | IsKeyWord (const char *sKeyWord) |
| virtual int | IsKeyWord (void) |
| virtual bool | IsArg (void) |
| virtual bool | IsStringWithDelims (enum Delims Del=DEFAULTDELIM) |
| virtual const char * | IsWord (const HighParser::WordSet &ws) |
| virtual void | PutBackSemicolon (void) |
| virtual bool | GetBool (bool bDefval=false) |
| virtual bool | GetYesNo (bool &bRet) |
| virtual bool | GetYesNoOrBool (bool bDefval=false) |
| virtual integer | GetInt (integer iDefval=0) |
| template<class Range > | |
| integer | GetInt (integer iDefval, Range r) |
| virtual doublereal | GetReal (const doublereal &dDefval=0.0) |
| template<class Range > | |
| doublereal | GetReal (const doublereal &dDefval, Range r) |
| virtual std::string | GetString (const std::string &sDefVal) |
| virtual TypedValue | GetValue (const TypedValue &v) |
| template<class Range > | |
| TypedValue | GetValue (const TypedValue &v, Range r) |
| virtual mbsleep_t | GetTimeout (const mbsleep_t &DefVal) |
| virtual int | GetWord (void) |
| virtual const char * | GetString (unsigned flags=HighParser::NONE) |
| virtual const char * | GetStringWithDelims (enum Delims Del=DEFAULTDELIM, bool escape=true) |
| template<class Range > | |
| integer | GetInt (int iDefVal, Range range) |
Protected Types | |
| typedef std::map< unsigned, const ConstitutiveLaw1D * > | CL1DType |
| typedef std::map< unsigned, const ConstitutiveLaw3D * > | CL3DType |
| typedef std::map< unsigned, const ConstitutiveLaw6D * > | CL6DType |
| typedef std::map< std::string, const BasicScalarFunction * > | SFType |
Protected Member Functions | |
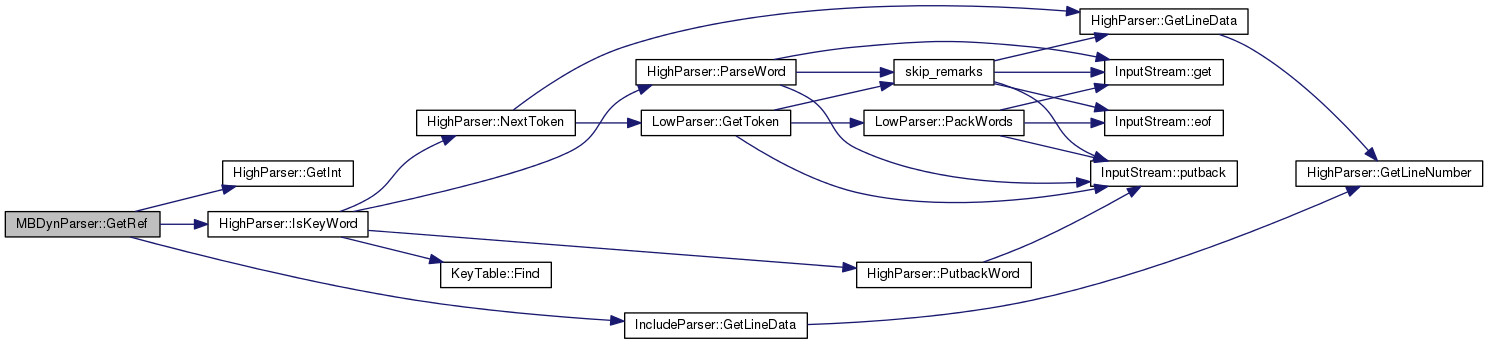
| Frame | GetRef (ReferenceFrame &rf) |
| bool | Reference_int (void) |
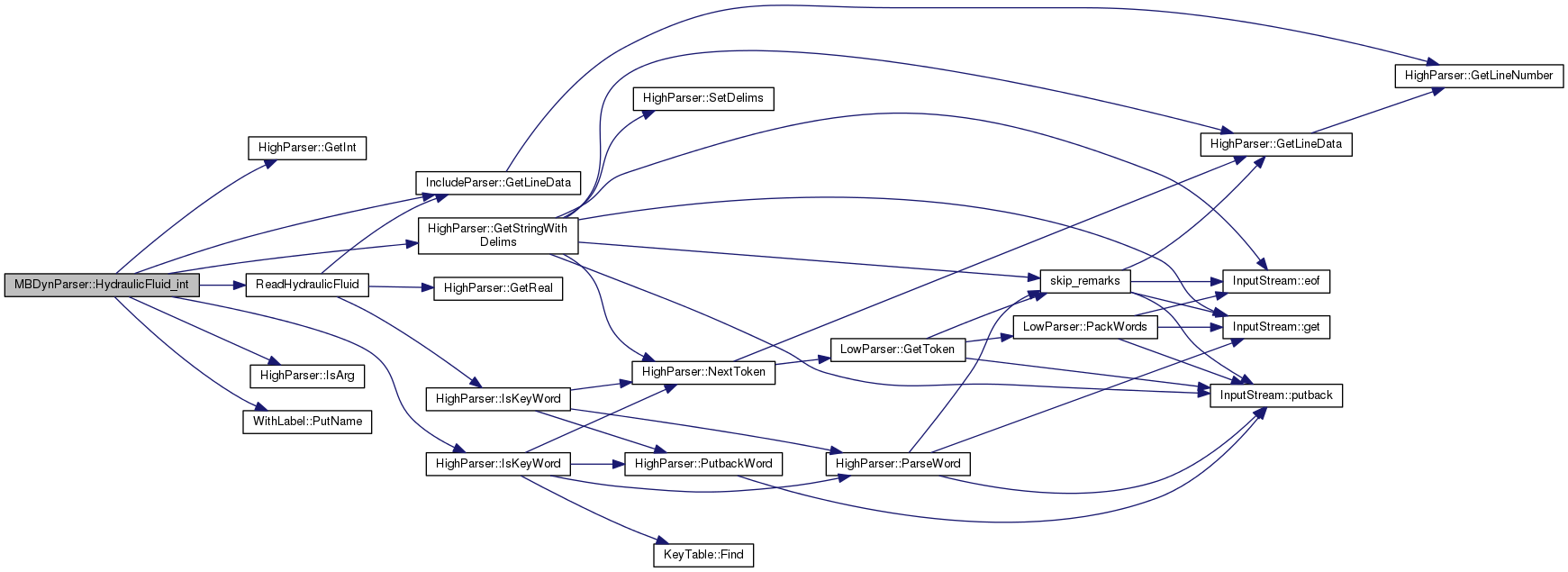
| bool | HydraulicFluid_int (void) |
| bool | C81Data_int (void) |
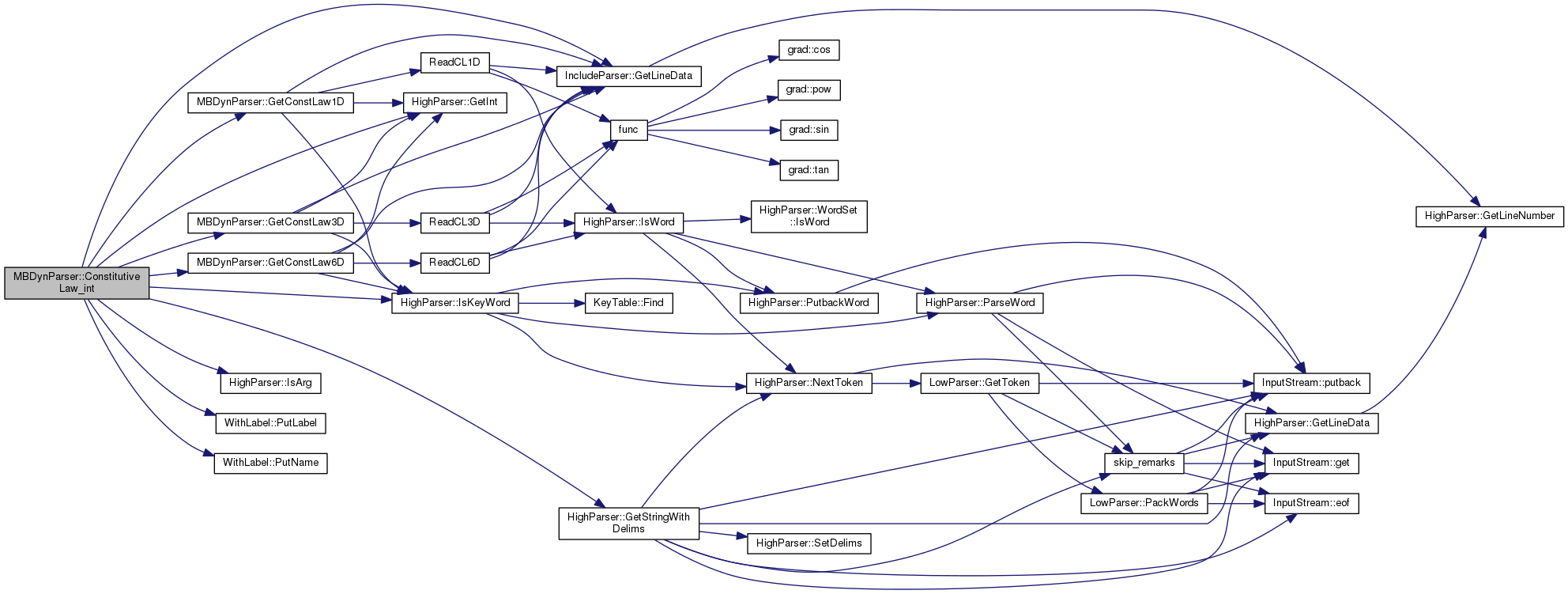
| bool | ConstitutiveLaw_int (void) |
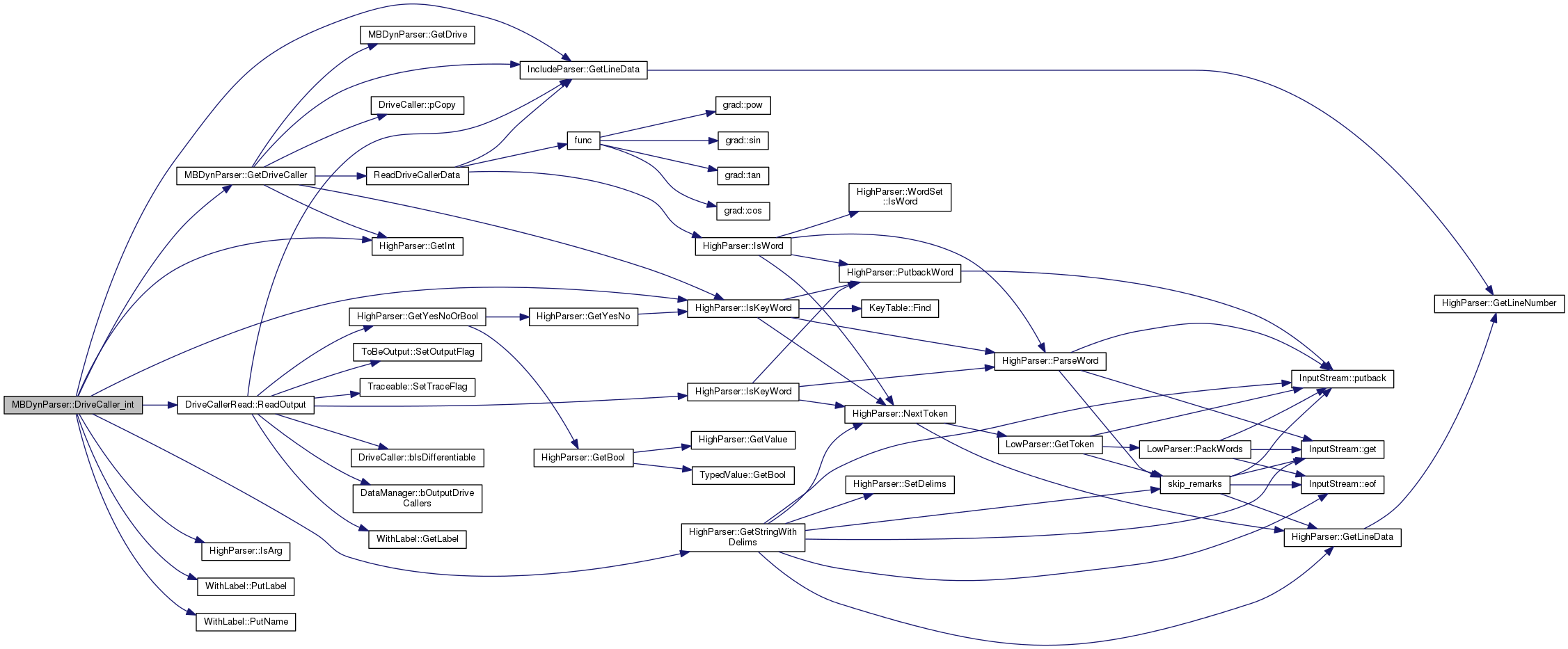
| bool | DriveCaller_int (void) |
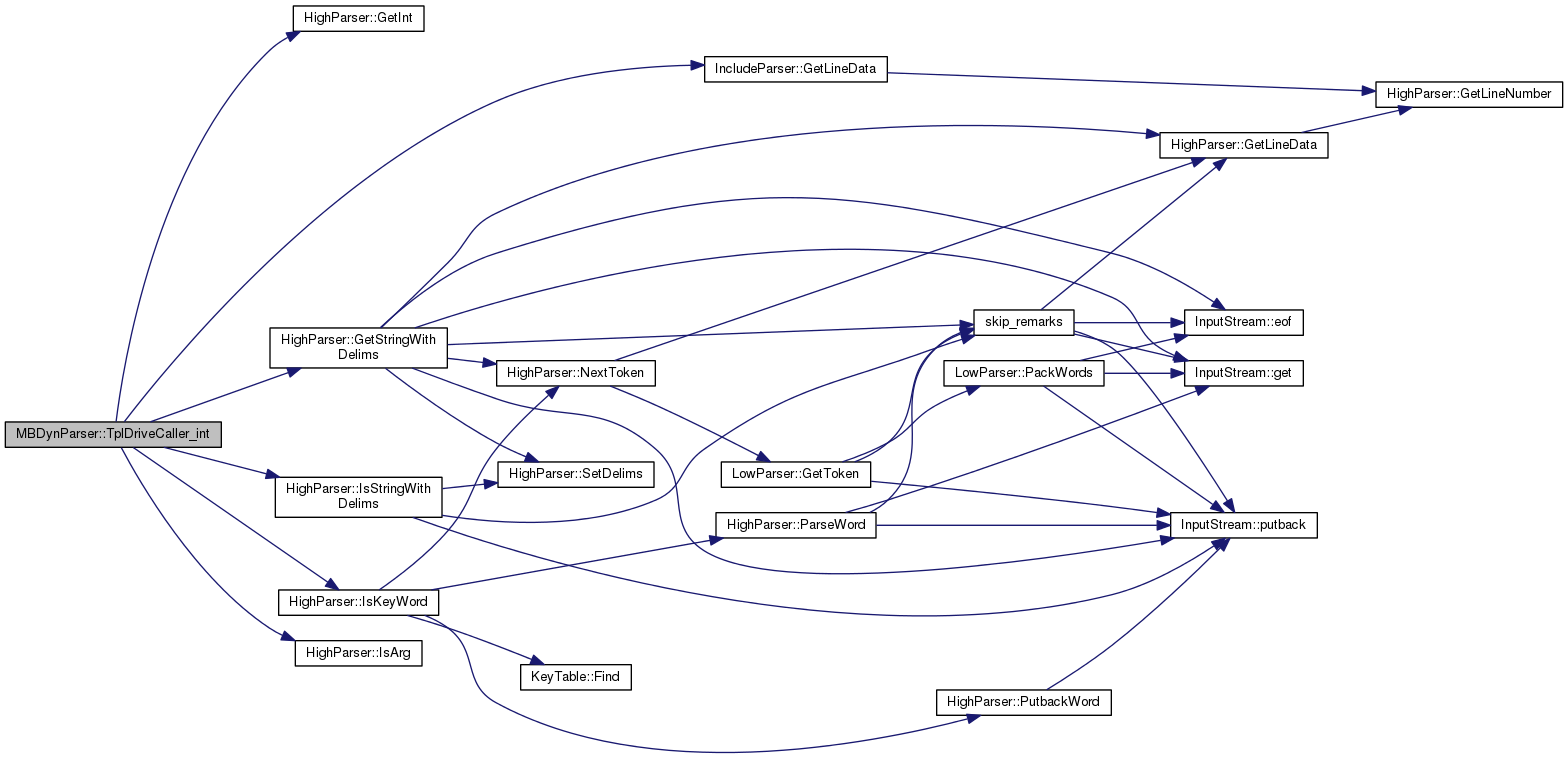
| bool | TplDriveCaller_int (void) |
| bool | ScalarFunction_int (void) |
| bool | ModuleLoad_int (void) |
| Protected Member Functions inherited from IncludeParser | |
| flag | fCheckStack (void) |
| bool | Include_int (void) |
| virtual void | Eof (void) |
| Protected Member Functions inherited from HighParser | |
| virtual HighParser::Token | FirstToken (void) |
| virtual void | NextToken (const char *sFuncName) |
| int | iGetDescription_int (const char *const s) |
| virtual void | SetDelims (enum Delims Del, char &cLdelim, char &cRdelim) const |
| int | ParseWord (unsigned flags=HighParser::NONE) |
| void | PutbackWord (void) |
Protected Attributes | |
| RFType | RF |
| HFType | HF |
| ADType | AD |
| CL1DType | CL1D |
| CL3DType | CL3D |
| CL6DType | CL6D |
| DCType | DC |
| DC1DType | DC1D |
| DC3DType | DC3D |
| DC6DType | DC6D |
| DC3x3DType | DC3x3D |
| DC6x6DType | DC6x6D |
| SFType | SF |
| bool | moduleInitialized |
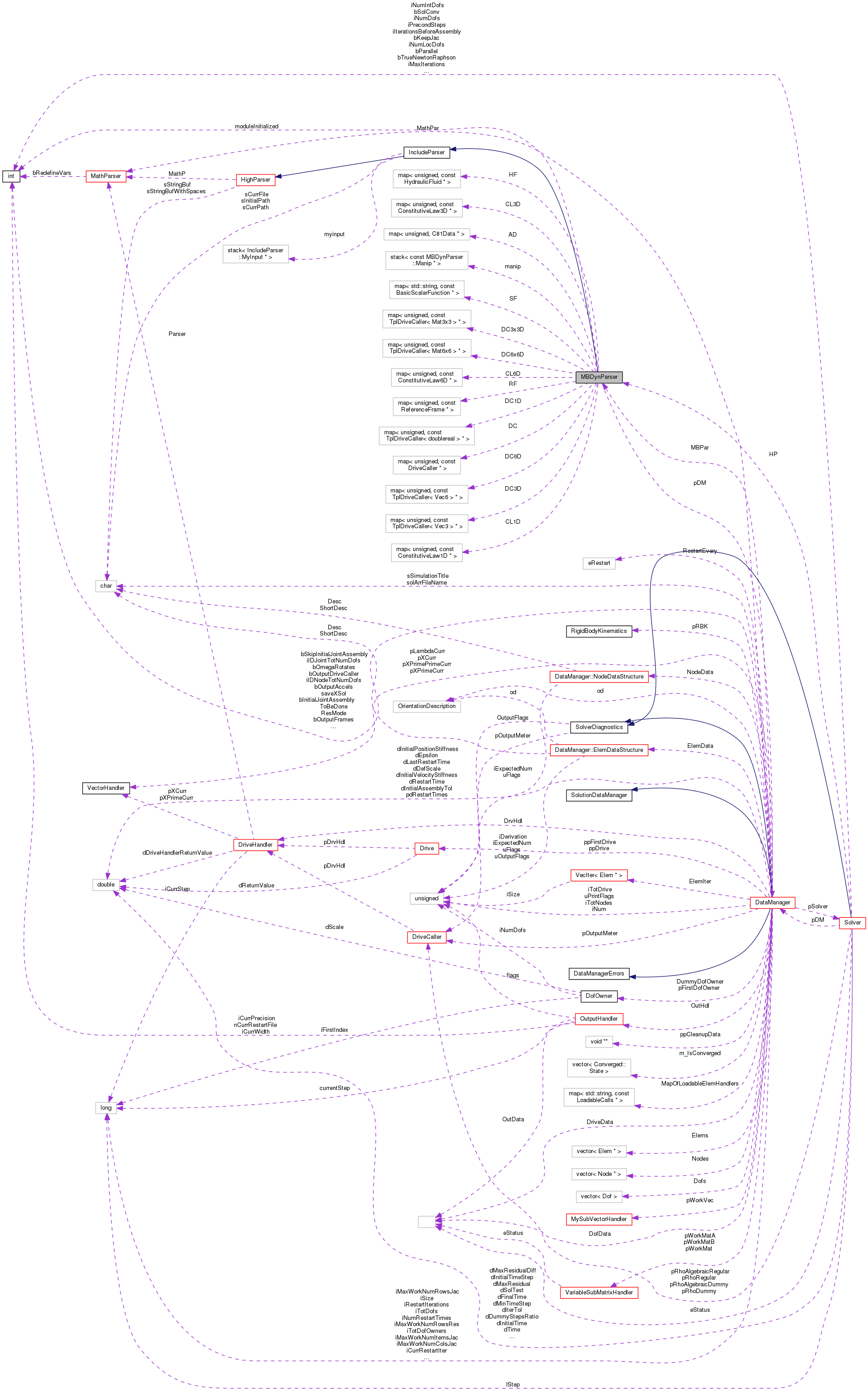
| DataManager * | pDM |
| Protected Attributes inherited from IncludeParser | |
| std::stack< MyInput * > | myinput |
| char * | sCurrPath |
| char * | sInitialPath |
| char * | sCurrFile |
| Protected Attributes inherited from HighParser | |
| LowParser | LowP |
| InputStream * | pIn |
| std::ifstream * | pf |
| char | sStringBuf [iDefaultBufSize] |
| char | sStringBufWithSpaces [iDefaultBufSize] |
| MathParser & | MathP |
| const KeyTable * | KeyT |
| LowParser::Token | CurrLowToken |
| Token | CurrToken |
Private Member Functions | |
| MBDynParser (const MBDynParser &) | |
Private Attributes | |
| std::stack< const Manip * > | manip |
Friends | |
| struct | RefFrameDR |
| struct | HFluidDR |
| struct | C81DataDR |
| struct | ConstLawDR |
| struct | DriveCallerDR |
| struct | TplDriveCallerDR |
| struct | SFuncDR |
| struct | ModuleLoadDR |
Additional Inherited Members | |
| Public Attributes inherited from HighParser | |
| const char | ESCAPE_CHAR |
| typedef std::map<unsigned, C81Data *> MBDynParser::ADType |
|
protected |
|
protected |
|
protected |
| typedef std::map<unsigned, const TplDriveCaller<doublereal> *> MBDynParser::DC1DType |
| typedef std::map<unsigned, const TplDriveCaller<Vec3> *> MBDynParser::DC3DType |
| typedef std::map<unsigned, const TplDriveCaller<Mat3x3> *> MBDynParser::DC3x3DType |
| typedef std::map<unsigned, const TplDriveCaller<Vec6> *> MBDynParser::DC6DType |
| typedef std::map<unsigned, const TplDriveCaller<Mat6x6> *> MBDynParser::DC6x6DType |
| typedef std::map<unsigned, const DriveCaller *> MBDynParser::DCType |
| typedef std::map<unsigned, const HydraulicFluid *> MBDynParser::HFType |
| typedef std::map<unsigned, const ReferenceFrame *> MBDynParser::RFType |
|
protected |
| enum MBDynParser::Frame |
| Enumerator | |
|---|---|
| UNKNOWNFRAME | |
| GLOBAL | |
| NODE | |
| LOCAL | |
| REFERENCE | |
| OTHER_POSITION | |
| OTHER_ORIENTATION | |
| OTHER_NODE | |
| LASTFRAME | |
Definition at line 145 of file mbpar.h.
| Enumerator | |
|---|---|
| VM_NONE | |
| VM_POSABS | |
| VM_VELABS | |
| VM_OMEABS | |
| VM_VECABS | |
| VM_UNITVECABS | |
| VM_MATABS | |
| VM_ROTABS | |
| VM_MOD_REL | |
| VM_MOD_OTHER | |
| VM_POSREL | |
| VM_VELREL | |
| VM_OMEREL | |
| VM_VECREL | |
| VM_UNITVECREL | |
| VM_MATREL | |
| VM_ROTREL | |
| VM_LAST | |
Definition at line 332 of file mbpar.h.
|
private |
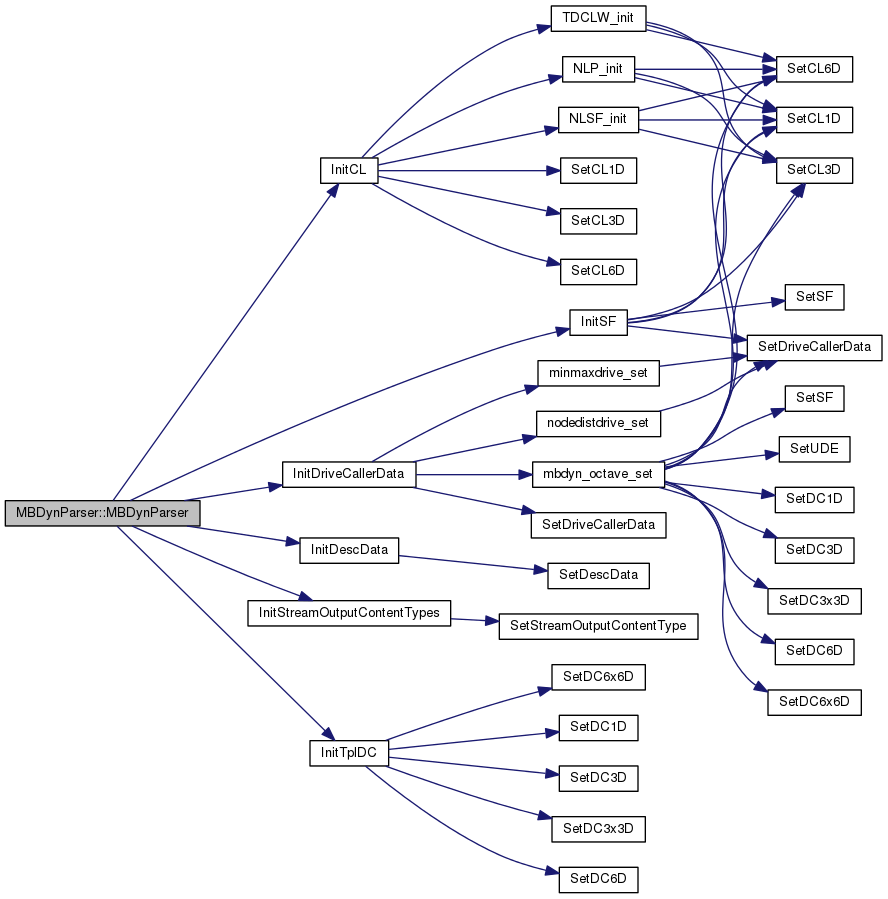
| MBDynParser::MBDynParser | ( | MathParser & | MP, |
| InputStream & | streamIn, | ||
| const char * | initial_file | ||
| ) |
Definition at line 214 of file mbpar.cc.
References InitCL(), InitDescData(), InitDriveCallerData(), InitSF(), InitStreamOutputContentTypes(), and InitTplDC().
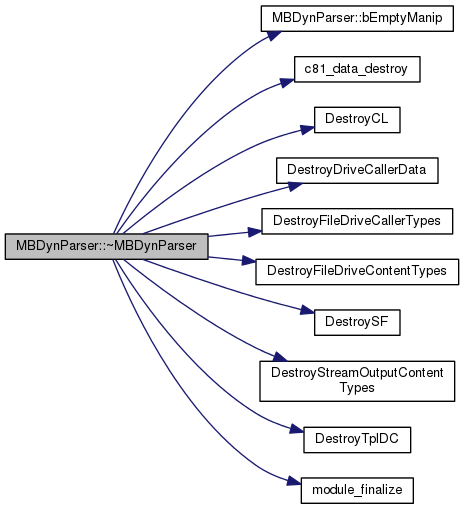
| MBDynParser::~MBDynParser | ( | void | ) |
Definition at line 232 of file mbpar.cc.
References AD, bEmptyManip(), c81_data_destroy(), CL1D, CL3D, CL6D, DC, DestroyCL(), DestroyDriveCallerData(), DestroyFileDriveCallerTypes(), DestroyFileDriveContentTypes(), DestroySF(), DestroyStreamOutputContentTypes(), DestroyTplDC(), HF, module_finalize(), moduleInitialized, RF, SAFEDELETE, and SF.
| bool MBDynParser::bEmptyManip | ( | void | ) | const |
Definition at line 2207 of file mbpar.cc.
References manip.
Referenced by Get(), and ~MBDynParser().
|
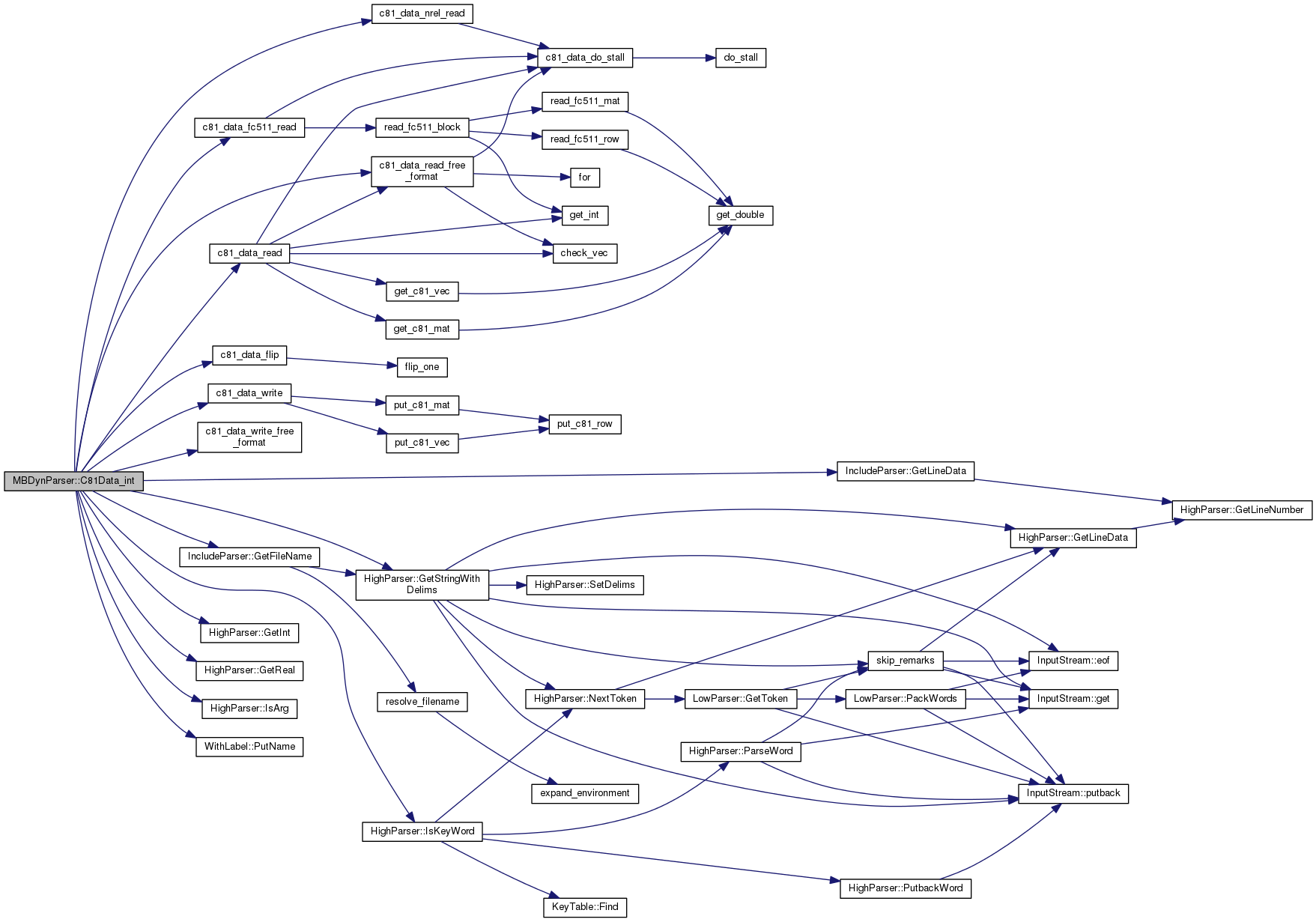
protected |
Definition at line 495 of file mbpar.cc.
References c81_data::ad, AD, c81_data::al, c81_data::am, c81_data_fc511_read(), c81_data_flip(), c81_data_nrel_read(), c81_data_read(), c81_data_read_free_format(), c81_data_write(), c81_data_write_free_format(), DEBUGLCOUT, filename, IncludeParser::GetFileName(), HighParser::GetInt(), IncludeParser::GetLineData(), HighParser::GetReal(), HighParser::GetStringWithDelims(), HighParser::IsArg(), HighParser::IsKeyWord(), MBDYN_EXCEPT_ARGS, c81_data::md, c81_data::ml, c81_data::mm, MYDEBUG_INPUT, c81_data::NAD, c81_data::NAL, c81_data::NAM, WithLabel::PutName(), and SAFENEWWITHCONSTRUCTOR.
Referenced by C81DataDR::Read().
|
protected |
Definition at line 695 of file mbpar.cc.
References CL1D, CL3D, CL6D, GetConstLaw1D(), GetConstLaw3D(), GetConstLaw6D(), HighParser::GetInt(), IncludeParser::GetLineData(), HighParser::GetStringWithDelims(), HighParser::IsArg(), HighParser::IsKeyWord(), MBDYN_EXCEPT_ARGS, pDM, WithLabel::PutLabel(), and WithLabel::PutName().
Referenced by ConstLawDR::Read().
|
protected |
Definition at line 890 of file mbpar.cc.
References DC, GetDriveCaller(), HighParser::GetInt(), IncludeParser::GetLineData(), HighParser::GetStringWithDelims(), HighParser::IsArg(), HighParser::IsKeyWord(), MBDYN_EXCEPT_ARGS, pDM, WithLabel::PutLabel(), WithLabel::PutName(), and DriveCallerRead::ReadOutput().
Referenced by DriveCallerDR::Read().
|
virtual |
Definition at line 2213 of file mbpar.cc.
References HighParser::GetReal().
Referenced by GetPreStress(), GetT(), NLSFViscoElasticCLR< T, Tder, Typ >::Read(), LinearElasticGenericCLR< T, Tder >::Read(), NLPViscoElasticCLR< T, Tder, Typ >::Read(), LinearElasticGenericAxialTorsionCouplingCLR< T, Tder >::Read(), LinearViscoElasticGenericAxialTorsionCouplingCLR< T, Tder >::Read(), LinearViscousGenericCLR< T, Tder >::Read(), LinearViscoElasticGenericCLR< T, Tder >::Read(), LTVViscoElasticGenericCLR< T, Tder >::Read(), CubicElasticGenericCLR< T, Tder >::Read(), and CubicViscoElasticGenericCLR< T, Tder >::Read().

Definition at line 2788 of file mbpar.cc.
References bEmptyManip(), MBDynParser::TplManip< T >::Get(), GetManip(), GetVec3(), and PopManip().
Definition at line 2812 of file mbpar.cc.
References GetMat3x3().

Definition at line 2824 of file mbpar.cc.
References GetMat6x6().

| const c81_data * MBDynParser::GetC81Data | ( | unsigned | profile | ) | const |
Definition at line 1921 of file mbpar.cc.
References AD, IncludeParser::GetLineData(), and MBDYN_EXCEPT_ARGS.
Referenced by ReadAeroData(), and ReadC81MultipleAeroData().

| const MBDynParser::ADType & MBDynParser::GetC81DataContainer | ( | void | ) | const |
| ConstitutiveLaw1D * MBDynParser::GetConstLaw1D | ( | ConstLawType::Type & | clt | ) |
Definition at line 1941 of file mbpar.cc.
References CL1D, HighParser::GetInt(), IncludeParser::GetLineData(), HighParser::IsKeyWord(), MBDYN_EXCEPT_ARGS, pDM, and ReadCL1D().
Referenced by ConstitutiveLaw_int(), AxialCLR::Read(), TDCLWR< T, Tder >::Read(), and ReadGenel().
| ConstitutiveLaw3D * MBDynParser::GetConstLaw3D | ( | ConstLawType::Type & | clt | ) |
Definition at line 1968 of file mbpar.cc.
References CL3D, HighParser::GetInt(), IncludeParser::GetLineData(), HighParser::IsKeyWord(), MBDYN_EXCEPT_ARGS, pDM, and ReadCL3D().
Referenced by ConstitutiveLaw_int(), TDCLWR< T, Tder >::Read(), and InvAngularCLR::Read().
| ConstitutiveLaw6D * MBDynParser::GetConstLaw6D | ( | ConstLawType::Type & | clt | ) |
Definition at line 1995 of file mbpar.cc.
References CL6D, HighParser::GetInt(), IncludeParser::GetLineData(), HighParser::IsKeyWord(), MBDYN_EXCEPT_ARGS, pDM, and ReadCL6D().
Referenced by ConstitutiveLaw_int(), TDCLWR< T, Tder >::Read(), ReadBeam(), ReadBeam2(), and ReadHBeam().
| DataManager * MBDynParser::GetDataManager | ( | void | ) | const |
| const DriveCaller * MBDynParser::GetDrive | ( | unsigned | uLabel | ) | const |
Definition at line 2022 of file mbpar.cc.
References DC.
Referenced by PostponedDriveCaller::Check(), and GetDriveCaller().
| DriveCaller * MBDynParser::GetDriveCaller | ( | bool | bDeferred = false | ) |
Definition at line 2033 of file mbpar.cc.
References GetDrive(), HighParser::GetInt(), IncludeParser::GetLineData(), HighParser::IsKeyWord(), MBDYN_EXCEPT_ARGS, DriveCaller::pCopy(), pDM, and ReadDriveCallerData().
Referenced by AeroDynModule::AeroDynModule(), asynchronous_machine::asynchronous_machine(), DriveCaller_int(), HydrodynamicPlainBearing::HydrodynamicPlainBearing(), LoadIncNorm::LoadIncNorm(), ModuleFMU::ModuleFMU(), ModuleMDS::ModuleMDS(), SingleTDCR< T >::Read(), SwitchDriveDCR::Read(), PowerLawGR::Read(), MinMaxDriveDCR::Read(), Gust1DGR::Read(), LogarithmicGR::Read(), ChangeStepTSR::Read(), MusclePennestriCLR::Read(), CompTDCR< T >::Read(), ArrayTDCR< T >::Read(), LTVViscoElasticGenericCLR< T, Tder >::Read(), LinearBiStopCLR< T, Tder >::Read(), MultDCR::Read(), FunctionDCR::Read(), FrequencySweepDCR::Read(), ClosestNextDCR::Read(), DofDCR::Read(), SimulationEntityDCR::Read(), DriveDCR::Read(), SHDCR::Read(), ArrayDCR::Read(), PeriodicDCR::Read(), ReadAeroData(), ReadAirProperties(), ReadBiStopBase(), ReadBulk(), DataManager::ReadControl(), InverseSolver::ReadData(), Solver::ReadData(), ReadElectric(), DataManager::ReadElems(), ReadForce(), ReadGenel(), ReadHydraulicElem(), ReadJoint(), ReadModalForce(), ReadPX(), ReadRotor(), ReadScalarValue(), ReadStructuralForce(), ReadThermal(), ReadUniform(), ReadVariableBody(), ShockAbsorberConstitutiveLaw< doublereal, doublereal >::ShockAbsorberConstitutiveLaw(), Wheel2::Wheel2(), and Wheel4::Wheel4().
| const MBDynParser::DC1DType & MBDynParser::GetDriveCaller1DContainer | ( | void | ) | const |
| const MBDynParser::DC3DType & MBDynParser::GetDriveCaller3DContainer | ( | void | ) | const |
| const MBDynParser::DC3x3DType & MBDynParser::GetDriveCaller3x3DContainer | ( | void | ) | const |
| const MBDynParser::DC6DType & MBDynParser::GetDriveCaller6DContainer | ( | void | ) | const |
| const MBDynParser::DC6x6DType & MBDynParser::GetDriveCaller6x6DContainer | ( | void | ) | const |
| const MBDynParser::DCType & MBDynParser::GetDriveCallerContainer | ( | void | ) | const |
Definition at line 854 of file mbpar.cc.
References DC.
Referenced by DataManager::DataManager(), DataManager::DriveOutput(), and DataManager::DriveTrace().
| HydraulicFluid * MBDynParser::GetHydraulicFluid | ( | void | ) |
Definition at line 1893 of file mbpar.cc.
References HighParser::GetInt(), IncludeParser::GetLineData(), HF, HighParser::IsKeyWord(), MBDYN_EXCEPT_ARGS, and ReadHydraulicFluid().
Referenced by ReadHydraulicElem().

| const MBDynParser::HFType & MBDynParser::GetHydraulicFluidContainer | ( | void | ) | const |
| const MBDynParser::Manip * MBDynParser::GetManip | ( | void | ) | const |
|
virtual |
Definition at line 2438 of file mbpar.cc.
References Zero3x3.
Referenced by Get(), GetMatAbs(), and GetMatRel().
Definition at line 2447 of file mbpar.cc.
References Eye3, HighParser::GetReal(), HighParser::IsKeyWord(), NO_OP, and Zero3x3.
|
virtual |
Definition at line 2402 of file mbpar.cc.
References Eye3, HighParser::GetReal(), HighParser::IsKeyWord(), and Zero3x3.

|
virtual |
Definition at line 2547 of file mbpar.cc.
References Zero6x6.
Referenced by Get().
Definition at line 2556 of file mbpar.cc.
References Eye6, HighParser::GetReal(), HighParser::IsKeyWord(), NO_OP, and Zero6x6.
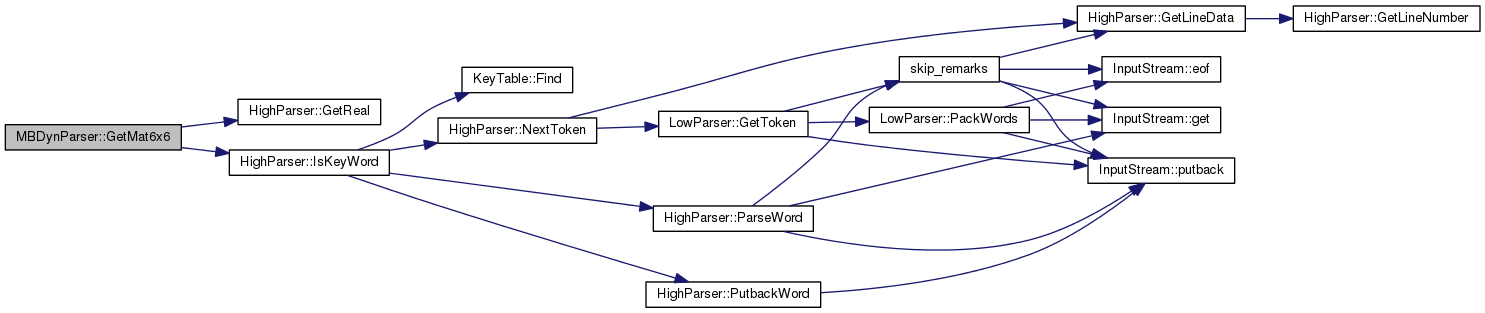
Definition at line 2743 of file mbpar.cc.
References ASSERT, HighParser::GetReal(), Mat3xN::iGetNumCols(), HighParser::IsKeyWord(), NO_OP, Mat3xN::Put(), and Mat3xN::Reset().
Referenced by ReadBeam(), ReadBeam2(), and ReadHBeam().
| Mat3x3 MBDynParser::GetMatAbs | ( | const ReferenceFrame & | rf | ) |
Definition at line 1766 of file mbpar.cc.
References ASSERTMSG, IncludeParser::GetLineData(), GetMat3x3(), ReferenceFrame::GetR(), GetRef(), GLOBAL, LOCAL, MBDYN_EXCEPT_ARGS, NODE, OTHER_NODE, OTHER_ORIENTATION, OTHER_POSITION, REFERENCE, Mat3x3::Transpose(), and UNKNOWNFRAME.
|
virtual |
Definition at line 2255 of file mbpar.cc.
References EulerAngles123_2MatR(), EulerAngles313_2MatR(), EulerAngles321_2MatR(), Eye3, grad::fabs(), HighParser::GetInt(), IncludeParser::GetLineData(), HighParser::GetReal(), HighParser::IsKeyWord(), Mat3x3::IsSame(), M_PI, MatR2vec(), MBDYN_EXCEPT_ARGS, Mat3x3::MulTM(), R, RotManip::Rot(), and Zero3.
Referenced by GetOmeAbs(), GetOmeRel(), GetPosAbs(), GetPosRel(), GetRotAbs(), GetRotRel(), GetVecAbs(), GetVecRel(), GetVelAbs(), and GetVelRel().
| Mat3x3 MBDynParser::GetMatRel | ( | const ReferenceFrame & | rf | ) |
Definition at line 1737 of file mbpar.cc.
References ASSERTMSG, IncludeParser::GetLineData(), GetMat3x3(), ReferenceFrame::GetR(), GetRef(), GLOBAL, LOCAL, MBDYN_EXCEPT_ARGS, Mat3x3::MulTM(), NODE, OTHER_NODE, OTHER_ORIENTATION, OTHER_POSITION, REFERENCE, and UNKNOWNFRAME.
Referenced by ReadBody().
| Vec3 MBDynParser::GetOmeAbs | ( | const ReferenceFrame & | rf | ) |
Definition at line 1551 of file mbpar.cc.
References ASSERTMSG, IncludeParser::GetLineData(), GetMatR2vec(), ReferenceFrame::GetR(), GetRef(), GetVec3(), ReferenceFrame::GetW(), GLOBAL, LOCAL, MBDYN_EXCEPT_ARGS, NODE, OTHER_NODE, OTHER_ORIENTATION, OTHER_POSITION, R, REFERENCE, and UNKNOWNFRAME.
Referenced by ReadStructNode(), and Reference_int().

| Vec3 MBDynParser::GetOmeRel | ( | const ReferenceFrame & | rf | ) |
Definition at line 1518 of file mbpar.cc.
References ASSERTMSG, IncludeParser::GetLineData(), GetMatR2vec(), ReferenceFrame::GetR(), GetRef(), GetVec3(), ReferenceFrame::GetW(), GLOBAL, LOCAL, MBDYN_EXCEPT_ARGS, Mat3x3::MulTV(), NODE, OTHER_NODE, OTHER_ORIENTATION, OTHER_POSITION, R, REFERENCE, and UNKNOWNFRAME.
| Vec3 MBDynParser::GetPosAbs | ( | const ReferenceFrame & | rf | ) |
Definition at line 1401 of file mbpar.cc.
References ASSERTMSG, IncludeParser::GetLineData(), GetMatR2vec(), ReferenceFrame::GetR(), GetRef(), GetVec3(), ReferenceFrame::GetX(), GLOBAL, LOCAL, MBDYN_EXCEPT_ARGS, NODE, OTHER_NODE, OTHER_ORIENTATION, OTHER_POSITION, R, REFERENCE, and UNKNOWNFRAME.
Referenced by DataManager::ReadControl(), ReadGravity(), ReadModal(), DataManager::ReadOneElem(), ReadStructNode(), and Reference_int().
| Vec3 MBDynParser::GetPosRel | ( | const ReferenceFrame & | rf | ) |
Definition at line 1331 of file mbpar.cc.
References ASSERTMSG, IncludeParser::GetLineData(), GetMatR2vec(), ReferenceFrame::GetR(), GetRef(), GetVec3(), ReferenceFrame::GetX(), GLOBAL, LOCAL, MBDYN_EXCEPT_ARGS, Mat3x3::MulTV(), NODE, OTHER_NODE, OTHER_ORIENTATION, OTHER_POSITION, R, REFERENCE, and UNKNOWNFRAME.
Referenced by AeroDynModule::AeroDynModule(), HydrodynamicPlainBearing::HydrodynamicPlainBearing(), InlineFriction::InlineFriction(), LoadIncForce::LoadIncForce(), ModuleIMU::ModuleIMU(), ModuleIMUConstraint::ModuleIMUConstraint(), ModuleNonsmoothNode::ModuleNonsmoothNode(), NodeDistDCR::Read(), ReadAerodynamicBeam(), ReadAerodynamicBeam2(), ReadAerodynamicBody(), ReadBeam(), ReadBeam2(), ReadBody(), ReadElectric(), ReadForce(), ReadGenericAerodynamicForce(), ReadHBeam(), ReadHydraulicElem(), ReadJoint(), ReadModal(), ReadStructExtForce(), ReadStructMappingExtForce(), ReadStructNode(), ReadStructuralForce(), and Wheel2::Wheel2().

| Vec3 MBDynParser::GetPosRel | ( | const ReferenceFrame & | rf, |
| const ReferenceFrame & | other_rf, | ||
| const Vec3 & | other_X | ||
| ) |
Definition at line 1364 of file mbpar.cc.
References ASSERTMSG, IncludeParser::GetLineData(), GetMatR2vec(), ReferenceFrame::GetR(), GetRef(), GetVec3(), ReferenceFrame::GetX(), GLOBAL, LOCAL, MBDYN_EXCEPT_ARGS, Mat3x3::MulTV(), NODE, OTHER_NODE, OTHER_ORIENTATION, OTHER_POSITION, R, REFERENCE, and UNKNOWNFRAME.
|
protected |
Definition at line 1279 of file mbpar.cc.
References HighParser::GetInt(), IncludeParser::GetLineData(), GLOBAL, HighParser::IsKeyWord(), LOCAL, MBDYN_EXCEPT_ARGS, NODE, OTHER_NODE, OTHER_ORIENTATION, OTHER_POSITION, REFERENCE, RF, and UNKNOWNFRAME.
Referenced by GetMatAbs(), GetMatRel(), GetOmeAbs(), GetOmeRel(), GetPosAbs(), GetPosRel(), GetRotAbs(), GetRotRel(), GetVecAbs(), GetVecRel(), GetVelAbs(), GetVelRel(), and Reference_int().
| const MBDynParser::RFType & MBDynParser::GetReferenceFrameContainer | ( | void | ) | const |
| Mat3x3 MBDynParser::GetRotAbs | ( | const ReferenceFrame & | rf | ) |
Definition at line 1857 of file mbpar.cc.
References ASSERTMSG, IncludeParser::GetLineData(), GetMatR2vec(), ReferenceFrame::GetR(), GetRef(), GLOBAL, LOCAL, MBDYN_EXCEPT_ARGS, NODE, OTHER_NODE, OTHER_ORIENTATION, OTHER_POSITION, REFERENCE, and UNKNOWNFRAME.
Referenced by ScalarFuncGR::Read(), PowerLawGR::Read(), LogarithmicGR::Read(), ReadBeam(), ReadBeam2(), DataManager::ReadControl(), ReadModal(), DataManager::ReadOneElem(), ReadStructNode(), and Reference_int().
| Mat3x3 MBDynParser::GetRotRel | ( | const ReferenceFrame & | rf | ) |
Definition at line 1795 of file mbpar.cc.
References ASSERTMSG, IncludeParser::GetLineData(), GetMatR2vec(), ReferenceFrame::GetR(), GetRef(), GLOBAL, LOCAL, MBDYN_EXCEPT_ARGS, Mat3x3::MulTM(), NODE, OTHER_NODE, OTHER_ORIENTATION, OTHER_POSITION, REFERENCE, and UNKNOWNFRAME.
Referenced by AeroDynModule::AeroDynModule(), InlineFriction::InlineFriction(), ModuleIMU::ModuleIMU(), ModuleIMUConstraint::ModuleIMUConstraint(), ModuleNonsmoothNode::ModuleNonsmoothNode(), ReadAerodynamicBeam(), ReadAerodynamicBeam2(), ReadAerodynamicBody(), ReadAerodynamicModal(), ReadAircraftInstruments(), ReadBeam(), ReadBeam2(), ReadBody(), ReadElectric(), ReadForce(), ReadGenericAerodynamicForce(), ReadHBeam(), ReadModal(), ReadRotor(), ReadRotorData(), ReadShell4EAS(), ReadShell4EASANS(), and ReadStructNode().
| Mat3x3 MBDynParser::GetRotRel | ( | const ReferenceFrame & | rf, |
| const ReferenceFrame & | other_rf, | ||
| const Mat3x3 & | other_R | ||
| ) |
Definition at line 1824 of file mbpar.cc.
References ASSERTMSG, IncludeParser::GetLineData(), GetMatR2vec(), ReferenceFrame::GetR(), GetRef(), GLOBAL, LOCAL, MBDYN_EXCEPT_ARGS, Mat3x3::MulTM(), NODE, OTHER_NODE, OTHER_ORIENTATION, OTHER_POSITION, REFERENCE, and UNKNOWNFRAME.
| const BasicScalarFunction * MBDynParser::GetScalarFunction | ( | void | ) |
Definition at line 2158 of file mbpar.cc.
References HighParser::GetStringWithDelims(), HighParser::IsKeyWord(), ParseScalarFunction(), and pDM.
Referenced by ModelNameSpace::FindFunc(), ModelNameSpace::GetFunc(), and ParseScalarFunction().
| const BasicScalarFunction * MBDynParser::GetScalarFunction | ( | const std::string & | s | ) |
| const TplDriveCaller< T > * MBDynParser::GetTplDrive | ( | unsigned | uLabel | ) | const |
Definition at line 2064 of file mbpar.cc.
References DC1D, DC3D, DC3x3D, DC6D, and DC6x6D.
| TplDriveCaller< T > * MBDynParser::GetTplDriveCaller | ( | void | ) |
Definition at line 2112 of file mbpar.cc.
References HighParser::GetInt(), IncludeParser::GetLineData(), HighParser::IsKeyWord(), MBDYN_EXCEPT_ARGS, TplDriveCaller< T >::pCopy(), pDM, ReadDC1D(), ReadDC3D(), ReadDC3x3D(), ReadDC6D(), and ReadDC6x6D().
Referenced by GetPreStrain(), Eu2PhiDCR::Read(), ReadDCVec(), and ReadVariableBody().
| Vec3 MBDynParser::GetUnitVecAbs | ( | const ReferenceFrame & | rf | ) |
Definition at line 1716 of file mbpar.cc.
References Vec3::Dot(), grad::fabs(), IncludeParser::GetLineData(), GetVecAbs(), MBDYN_EXCEPT_ARGS, and grad::sqrt().
Referenced by ReadStructuralForce().
| Vec3 MBDynParser::GetUnitVecRel | ( | const ReferenceFrame & | rf | ) |
Definition at line 1695 of file mbpar.cc.
References Vec3::Dot(), grad::fabs(), IncludeParser::GetLineData(), GetVecRel(), MBDYN_EXCEPT_ARGS, and grad::sqrt().
Referenced by ReadElectric(), ReadHydraulicElem(), and ReadStructuralForce().
|
virtual |
Definition at line 2220 of file mbpar.cc.
References Zero3.
Referenced by Get(), GetOmeAbs(), GetOmeRel(), GetPosAbs(), GetPosRel(), GetVecAbs(), GetVecRel(), GetVelAbs(), GetVelRel(), LoadIncForce::LoadIncForce(), AxialCLR::Read(), PlaneHingeJoint::ReadInitialState(), ClampJoint::ReadInitialState(), PlanePinJoint::ReadInitialState(), and Wheel4::Wheel4().
Definition at line 2229 of file mbpar.cc.
References HighParser::GetReal(), HighParser::IsKeyWord(), and Zero3.
|
virtual |
Definition at line 2510 of file mbpar.cc.
References Zero6.
Referenced by Get().
Definition at line 2519 of file mbpar.cc.
References HighParser::GetReal(), HighParser::IsKeyWord(), and Zero6.
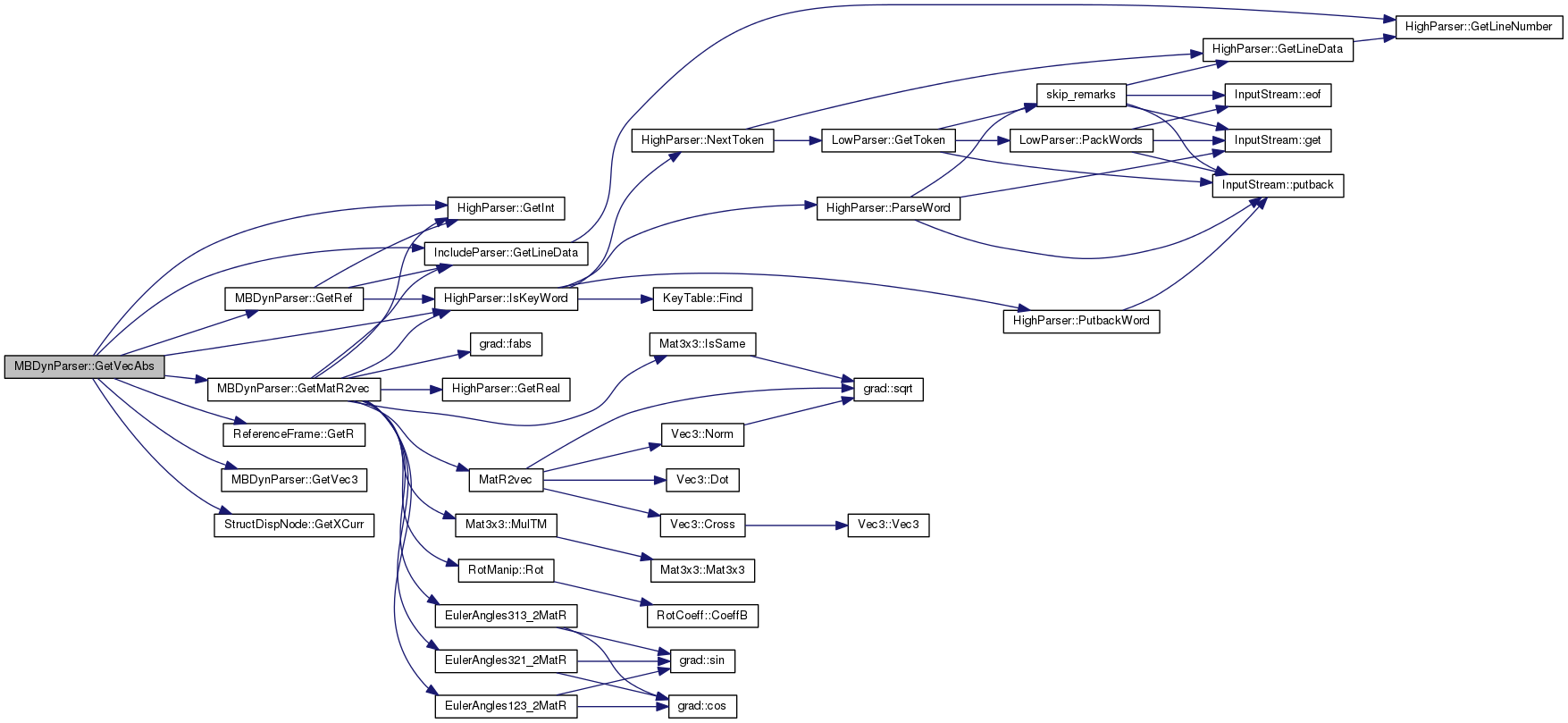
| Vec3 MBDynParser::GetVecAbs | ( | const ReferenceFrame & | rf | ) |
Definition at line 1641 of file mbpar.cc.
References ASSERTMSG, HighParser::GetInt(), IncludeParser::GetLineData(), GetMatR2vec(), ReferenceFrame::GetR(), GetRef(), GetVec3(), StructDispNode::GetXCurr(), GLOBAL, HighParser::IsKeyWord(), LOCAL, MBDYN_EXCEPT_ARGS, NODE, OTHER_NODE, OTHER_ORIENTATION, OTHER_POSITION, R, REFERENCE, and UNKNOWNFRAME.
Referenced by GetUnitVecAbs(), LoadIncForce::LoadIncForce(), ScalarFuncGR::Read(), PowerLawGR::Read(), Gust1DGR::Read(), LogarithmicGR::Read(), DataManager::ReadControl(), and DataManager::ReadElems().
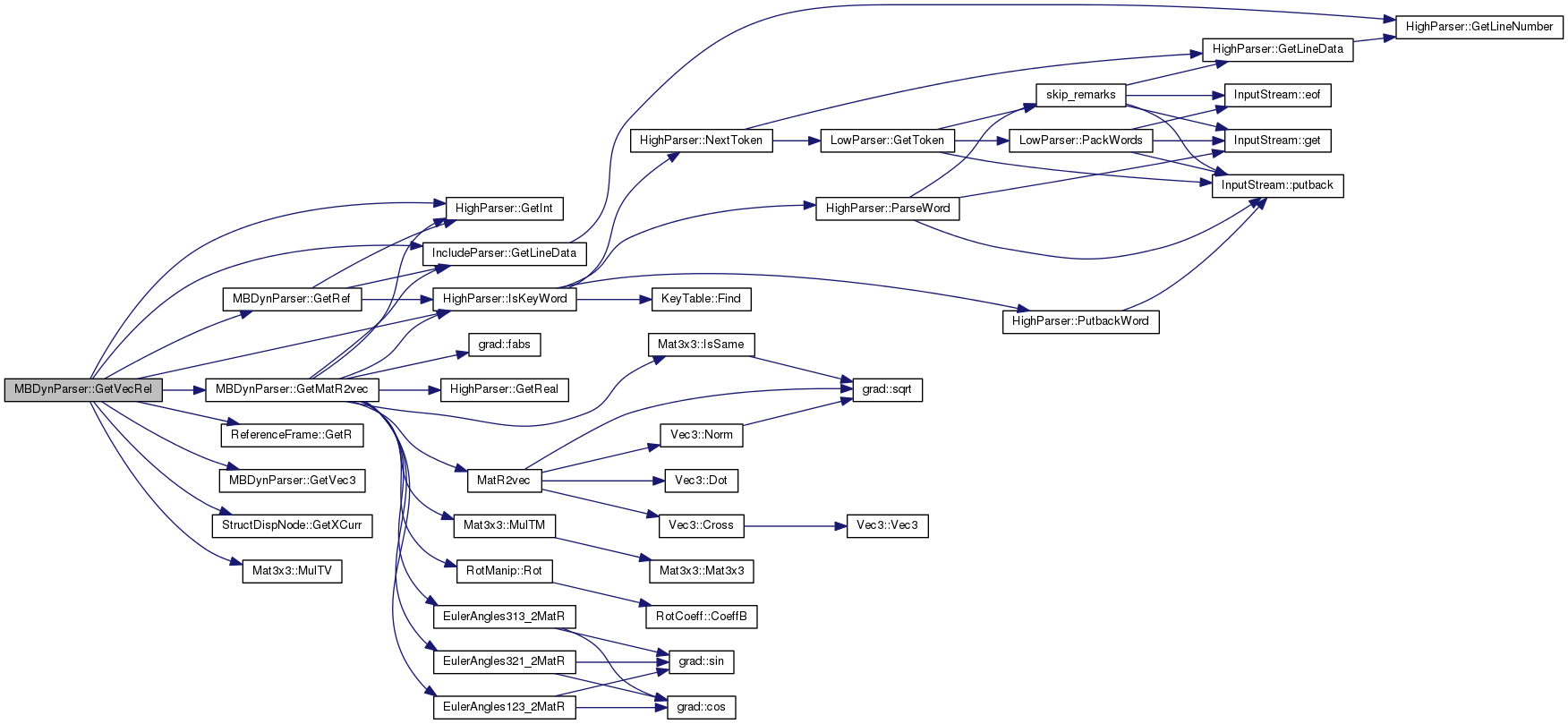
| Vec3 MBDynParser::GetVecRel | ( | const ReferenceFrame & | rf | ) |
Definition at line 1584 of file mbpar.cc.
References ASSERTMSG, HighParser::GetInt(), IncludeParser::GetLineData(), GetMatR2vec(), ReferenceFrame::GetR(), GetRef(), GetVec3(), StructDispNode::GetXCurr(), GLOBAL, HighParser::IsKeyWord(), LOCAL, MBDYN_EXCEPT_ARGS, Mat3x3::MulTV(), NODE, OTHER_NODE, OTHER_ORIENTATION, OTHER_POSITION, R, REFERENCE, and UNKNOWNFRAME.
Referenced by GetUnitVecRel(), LoadIncForce::LoadIncForce(), NodeDistDCR::Read(), Wheel2::Wheel2(), and Wheel4::Wheel4().
| Vec3 MBDynParser::GetVelAbs | ( | const ReferenceFrame & | rf, |
| const Vec3 & | x | ||
| ) |
Definition at line 1482 of file mbpar.cc.
References ASSERTMSG, Vec3::Cross(), IncludeParser::GetLineData(), GetMatR2vec(), ReferenceFrame::GetR(), GetRef(), ReferenceFrame::GetV(), GetVec3(), ReferenceFrame::GetW(), ReferenceFrame::GetX(), GLOBAL, LOCAL, MBDYN_EXCEPT_ARGS, NODE, OTHER_NODE, OTHER_ORIENTATION, OTHER_POSITION, R, REFERENCE, and UNKNOWNFRAME.
Referenced by ReadStructNode(), and Reference_int().

| Vec3 MBDynParser::GetVelRel | ( | const ReferenceFrame & | rf, |
| const Vec3 & | x | ||
| ) |
Definition at line 1441 of file mbpar.cc.
References ASSERTMSG, Vec3::Cross(), IncludeParser::GetLineData(), GetMatR2vec(), ReferenceFrame::GetR(), GetRef(), ReferenceFrame::GetV(), GetVec3(), ReferenceFrame::GetW(), ReferenceFrame::GetX(), GLOBAL, LOCAL, MBDYN_EXCEPT_ARGS, Mat3x3::MulTV(), NODE, OTHER_NODE, OTHER_ORIENTATION, OTHER_POSITION, R, REFERENCE, and UNKNOWNFRAME.
|
protected |
Definition at line 448 of file mbpar.cc.
References HighParser::GetInt(), IncludeParser::GetLineData(), HighParser::GetStringWithDelims(), HF, HighParser::IsArg(), HighParser::IsKeyWord(), MBDYN_EXCEPT_ARGS, WithLabel::PutName(), and ReadHydraulicFluid().
Referenced by HFluidDR::Read().
|
protected |
Definition at line 1190 of file mbpar.cc.
References IncludeParser::GetFileName(), IncludeParser::GetLineData(), HighParser::IsArg(), MBDYN_EXCEPT_ARGS, module_initialize(), moduleInitialized, and pDM.
Referenced by ModuleLoadDR::Read().

| void MBDynParser::OutputFrames | ( | std::ostream & | out | ) | const |
| void MBDynParser::PopManip | ( | void | ) |
| void MBDynParser::PushManip | ( | const Manip * | m | ) |
|
protected |
Definition at line 327 of file mbpar.cc.
References a, AbsRefFrame, Vec3::Cross(), DEBUGLCOUT, HighParser::GetInt(), IncludeParser::GetLineData(), GetOmeAbs(), GetPosAbs(), ReferenceFrame::GetR(), HighParser::GetReal(), GetRef(), GetRotAbs(), HighParser::GetStringWithDelims(), ReferenceFrame::GetV(), GetVelAbs(), ReferenceFrame::GetW(), ReferenceFrame::GetX(), GLOBAL, HighParser::IsArg(), HighParser::IsKeyWord(), MBDYN_EXCEPT_ARGS, MYDEBUG_INPUT, pDM, WithLabel::PutName(), R, ReadOptionalOrientationDescription(), REFERENCE, RF, RotManip::Rot(), SAFENEWWITHCONSTRUCTOR, UNKNOWNFRAME, Zero3, and Zero3x3.
Referenced by RefFrameDR::Read().

|
protected |
Definition at line 1169 of file mbpar.cc.
References IncludeParser::GetLineData(), HighParser::IsArg(), MBDYN_EXCEPT_ARGS, ParseScalarFunction(), and pDM.
Referenced by SFuncDR::Read().

| void MBDynParser::SetDataManager | ( | DataManager * | pdm | ) |
Definition at line 296 of file mbpar.cc.
References ASSERT, DC, pDM, DataManager::pGetDrvHdl(), and SetDrvHdl().
Referenced by DataManager::ReadControl().

| bool MBDynParser::SetScalarFunction | ( | const std::string & | s, |
| const BasicScalarFunction * | sf | ||
| ) |
|
protected |
Definition at line 950 of file mbpar.cc.
References DC1D, DC3D, DC3x3D, DC6D, DC6x6D, HighParser::GetInt(), IncludeParser::GetLineData(), HighParser::GetStringWithDelims(), HighParser::IsArg(), HighParser::IsKeyWord(), HighParser::IsStringWithDelims(), and MBDYN_EXCEPT_ARGS.
Referenced by TplDriveCallerDR::Read().
|
friend |
|
friend |
|
friend |
|
friend |
|
friend |
|
protected |
Definition at line 190 of file mbpar.h.
Referenced by C81Data_int(), GetC81Data(), GetC81DataContainer(), and ~MBDynParser().
|
protected |
Definition at line 198 of file mbpar.h.
Referenced by ConstitutiveLaw_int(), GetConstLaw1D(), and ~MBDynParser().
|
protected |
Definition at line 199 of file mbpar.h.
Referenced by ConstitutiveLaw_int(), GetConstLaw3D(), and ~MBDynParser().
|
protected |
Definition at line 200 of file mbpar.h.
Referenced by ConstitutiveLaw_int(), GetConstLaw6D(), and ~MBDynParser().
|
protected |
Definition at line 211 of file mbpar.h.
Referenced by DriveCaller_int(), GetDrive(), GetDriveCallerContainer(), SetDataManager(), and ~MBDynParser().
|
protected |
Definition at line 231 of file mbpar.h.
Referenced by GetDriveCaller1DContainer(), GetTplDrive(), and TplDriveCaller_int().
|
protected |
Definition at line 232 of file mbpar.h.
Referenced by GetDriveCaller3DContainer(), GetTplDrive(), and TplDriveCaller_int().
|
protected |
Definition at line 234 of file mbpar.h.
Referenced by GetDriveCaller3x3DContainer(), GetTplDrive(), and TplDriveCaller_int().
|
protected |
Definition at line 233 of file mbpar.h.
Referenced by GetDriveCaller6DContainer(), GetTplDrive(), and TplDriveCaller_int().
|
protected |
Definition at line 235 of file mbpar.h.
Referenced by GetDriveCaller6x6DContainer(), GetTplDrive(), and TplDriveCaller_int().
|
protected |
Definition at line 179 of file mbpar.h.
Referenced by GetHydraulicFluid(), GetHydraulicFluidContainer(), HydraulicFluid_int(), and ~MBDynParser().
|
private |
Definition at line 262 of file mbpar.h.
Referenced by bEmptyManip(), GetManip(), PopManip(), and PushManip().
|
protected |
Definition at line 248 of file mbpar.h.
Referenced by ModuleLoad_int(), and ~MBDynParser().
|
protected |
Definition at line 252 of file mbpar.h.
Referenced by ConstitutiveLaw_int(), DriveCaller_int(), GetConstLaw1D(), GetConstLaw3D(), GetConstLaw6D(), GetDataManager(), GetDriveCaller(), GetScalarFunction(), GetTplDriveCaller(), model_elem(), model_node(), ModuleLoad_int(), Reference_int(), ScalarFunction_int(), and SetDataManager().
|
protected |
Definition at line 166 of file mbpar.h.
Referenced by GetRef(), GetReferenceFrameContainer(), OutputFrames(), ReadAerodynamicModal(), ReadStructNode(), ReadVariableBody(), Reference_int(), and ~MBDynParser().
|
protected |
Definition at line 242 of file mbpar.h.
Referenced by GetScalarFunction(), SetScalarFunction(), and ~MBDynParser().
 1.8.7
1.8.7 

