|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
#include <dataman.h>
Classes | |
| struct | ElemDataStructure |
| struct | ElemRead |
| struct | NodeDataStructure |
| struct | NodeRead |
Public Types | |
| enum | eRestart { NEVER, ATEND, ITERATIONS, TIME, TIMES } |
| enum | ResType { RES_NONE = 0x00, RES_TEXT = 0x01, RES_NETCDF = 0x02 } |
| enum | ModuleInsertMode { MIM_FAIL, MIM_REPLACE, MIM_IGNORE } |
| enum | DerivationTable { ELEM = 0x0U, DOFOWNER = 0x1U, GRAVITYOWNER = 0x2U, AIRPROPOWNER = 0x4U, INITIALASSEMBLY = 0x8U } |
| enum | DataFlags { NONE = 0x00U, ISUNIQUE = 0x01U, TOBEUSEDINASSEMBLY = 0x02U, GENERATESINERTIAFORCES = 0x04U, USESAIRPROPERTIES = 0x08U, DEFAULTOUT = 0x10U } |
| typedef std::map< std::string, DataManager::ElemRead *, ltstrcase > | ElemReadType |
| typedef std::pair< unsigned, Elem * > | KeyElemPair |
| typedef std::list< KeyElemPair > | ElemContainerType |
| typedef std::map< unsigned, ElemContainerType::iterator > | ElemMapToListType |
| typedef std::map< std::string, DataManager::NodeRead *, ltstrcase > | NodeReadType |
| typedef std::pair< unsigned, Node * > | KeyNodePair |
| typedef std::list< KeyNodePair > | NodeContainerType |
| typedef std::map< unsigned, NodeContainerType::iterator > | NodeMapToListType |
| typedef std::vector< Dof > | DofVecType |
| typedef DofVecType::const_iterator | DofIterator_const |
| typedef DofVecType::iterator | DofIterator |
Public Member Functions | |
| bool | bOutput (ResType t) const |
| template<class T > | |
| flag | fReadOutput (MBDynParser &HP, const T &t) const |
| doublereal | dReadScale (MBDynParser &HP, enum DofOwner::Type t) const |
| bool | bOutputAccelerations (void) const |
| bool | bOutputDriveCallers (void) const |
| const doublereal & | dGetInitialPositionStiffness (void) const |
| const doublereal & | dGetInitialVelocityStiffness (void) const |
| bool | bDoesOmegaRotate (void) const |
| void | IncElemCount (Elem::Type type) |
| virtual clock_t | GetCPUTime (void) const |
| DataManager (MBDynParser &HP, unsigned OF, Solver *pS, doublereal dInitialTime, const char *sOutputFileName, const char *sInputFileName, bool bAbortAfterInput) | |
| virtual | ~DataManager (void) |
| int | Cleanup (void) |
| int | ReadScalarAlgebraicNode (MBDynParser &HP, unsigned int uLabel, Node::Type type, doublereal &dX) const |
| int | ReadScalarDifferentialNode (MBDynParser &HP, unsigned int uLabel, Node::Type type, doublereal &dX, doublereal &dXP) const |
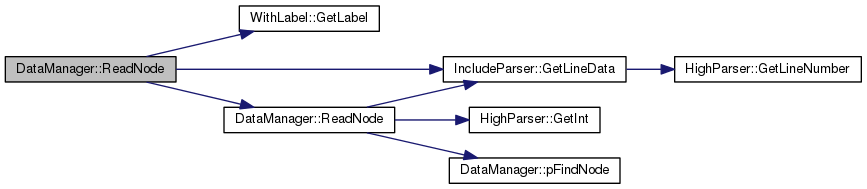
| Node * | ReadNode (MBDynParser &HP, Node::Type type) const |
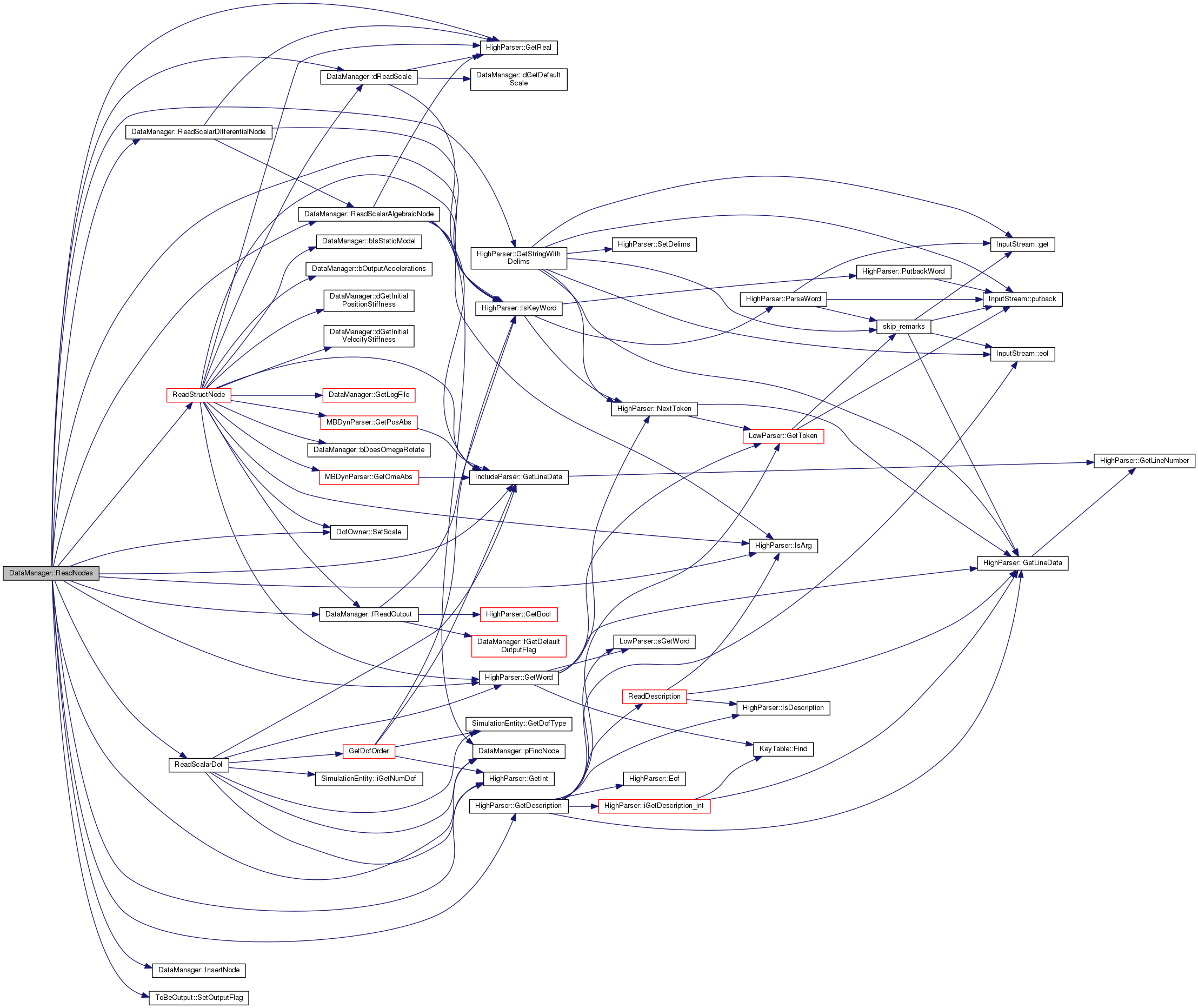
| Elem * | ReadElem (MBDynParser &HP, Elem::Type type) const |
| template<class Tbase , Node::Type type> | |
| Tbase * | ReadNode (MBDynParser &HP) const |
| template<class Tder , class Tbase , Node::Type type> | |
| Tder * | ReadNode (MBDynParser &HP) const |
| template<class Tbase , Elem::Type type> | |
| Tbase * | ReadElem (MBDynParser &HP) const |
| template<class Tder , class Tbase , Elem::Type type> | |
| Tder * | ReadElem (MBDynParser &HP) const |
| void | SetTime (const doublereal &dTime, const doublereal &dTimeStep=-1., const integer &iStep=-1, bool bServePending=true) |
| doublereal | dGetTime (void) const |
| NamedValue * | InsertSym (const char *const s, const Real &v, int redefine=0) |
| NamedValue * | InsertSym (const char *const s, const Int &v, int redefine=0) |
| void | LinkToSolution (VectorHandler &XCurr, VectorHandler &XPrimeCurr) |
| void | LinkToSolution (VectorHandler &XCurr, VectorHandler &XPrimeCurr, VectorHandler &XPrimePrimeCurr, VectorHandler &LambdaCurr) |
| std::ostream & | GetOutFile (void) const |
| std::ostream & | GetLogFile (void) const |
| const OutputHandler * | pGetOutHdl (void) const |
| void | SetOrientationDescription (OrientationDescription) |
| OrientationDescription | GetOrientationDescription (void) const |
| void | SetOutput (Elem::Type t, unsigned, OrientationDescription) |
| void | GetOutput (Elem::Type t, unsigned &, OrientationDescription &) const |
| const DriveHandler * | pGetDrvHdl (void) const |
| MathParser & | GetMathParser (void) const |
| MBDynParser & | GetMBDynParser (void) const |
| const Solver * | GetSolver (void) const |
| bool | PushCurrData (const std::string &name, const TypedValue &value) |
| bool | PopCurrData (const std::string &name) |
| virtual void | AssJac (MatrixHandler &JacHdl, doublereal dCoef) |
| virtual void | AssMats (MatrixHandler &A_Hdl, MatrixHandler &B_Hdl) |
| virtual void | AssRes (VectorHandler &ResHdl, doublereal dCoef) |
| virtual void | AssConstrRes (VectorHandler &ResHdl, InverseDynamics::Order iOrder) |
| virtual void | AssRes (VectorHandler &ResHdl) |
| virtual void | AssConstrJac (MatrixHandler &JacHdl) |
| unsigned | ConvergedRegister (void) |
| void | ConvergedSet (unsigned idx, Converged::State s) |
| bool | IsConverged (void) const |
| bool | EndOfSimulation (void) const |
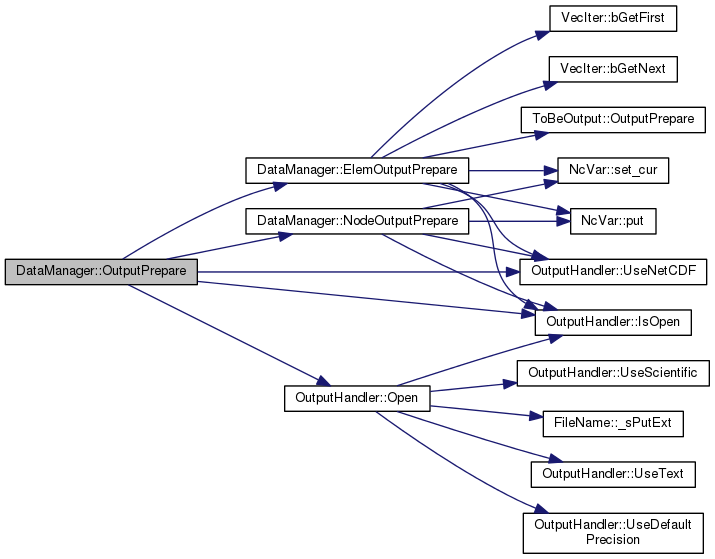
| virtual void | OutputPrepare (void) |
| virtual void | OutputEigPrepare (const integer iNumAnalyses, const integer iSize) |
| virtual bool | Output (long lStep, const doublereal &dTime, const doublereal &dTimeStep, bool force=false) const |
| virtual void | Output (const VectorHandler &X, const VectorHandler &XP) const |
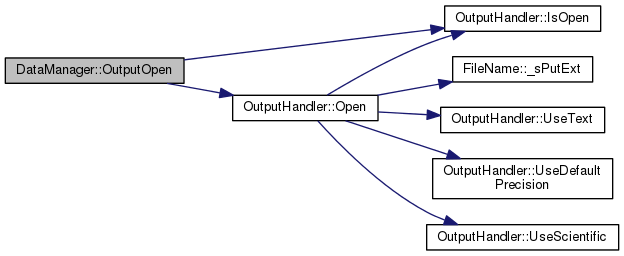
| void | OutputOpen (const OutputHandler::OutFiles out) |
| void | OutputEigOpen (const std::string &postfix) |
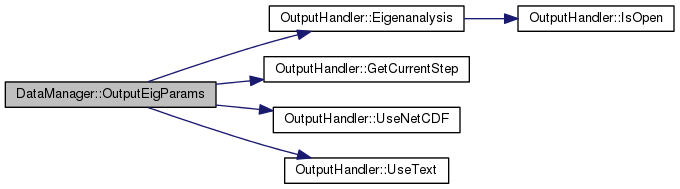
| void | OutputEigParams (const doublereal &dTime, const doublereal &dCoef, const unsigned uCurrEigSol, const int iResultsPrecision) |
| void | OutputEigFullMatrices (const MatrixHandler *pmMatA, const MatrixHandler *pmMatB, const unsigned uCurrEigSol, const int iMatrixPrecision) |
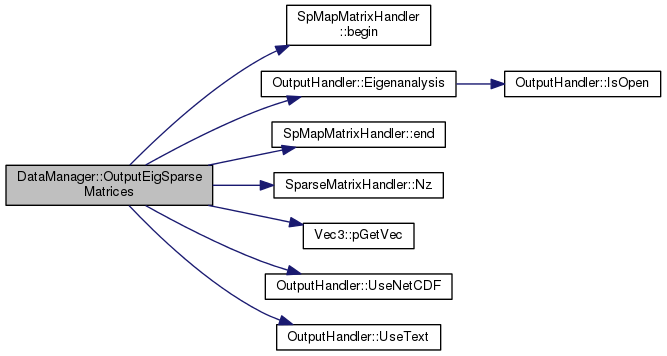
| void | OutputEigSparseMatrices (const MatrixHandler *pmMatA, const MatrixHandler *pmMatB, const unsigned uCurrEigSol, const int iMatrixPrecision) |
| void | OutputEigNaiveMatrices (const MatrixHandler *pmMatA, const MatrixHandler *pmMatB, const unsigned uCurrEigSol, const int iMatrixPrecision) |
| void | OutputEigenvectors (const VectorHandler *pBeta, const VectorHandler &R, const VectorHandler &I, const doublereal &dShiftR, const MatrixHandler *pVL, const MatrixHandler &VR, const std::vector< bool > &vOut, const unsigned uCurrEigSol, const int iResultsPrecision) |
| void | OutputEigGeometry (const unsigned uCurrSol, const int iResultsPrecision) |
| bool | OutputEigClose (void) |
| void | SetValue (VectorHandler &X, VectorHandler &XP) |
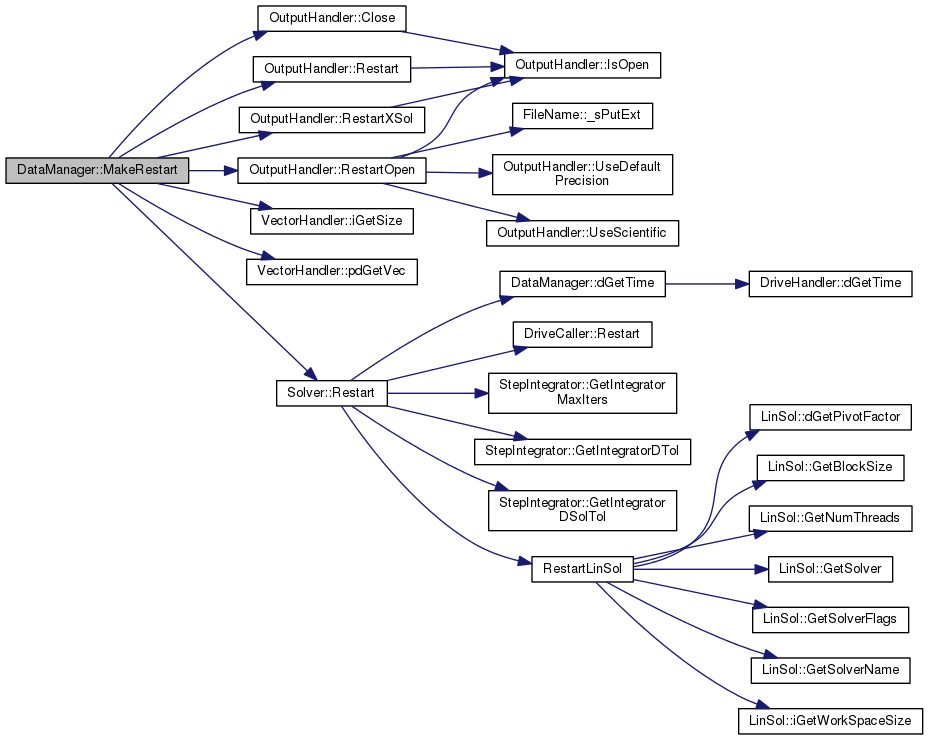
| virtual void | MakeRestart (void) |
| virtual void | DerivativesUpdate (void) const |
| virtual void | BeforePredict (VectorHandler &X, VectorHandler &XP, VectorHandler &XPrev, VectorHandler &XPPrev) const |
| virtual void | AfterPredict (void) const |
| virtual void | Update (void) const |
| virtual void | AfterConvergence (void) const |
| virtual void | Update (InverseDynamics::Order iOrder) const |
| virtual void | IDAfterConvergence (void) const |
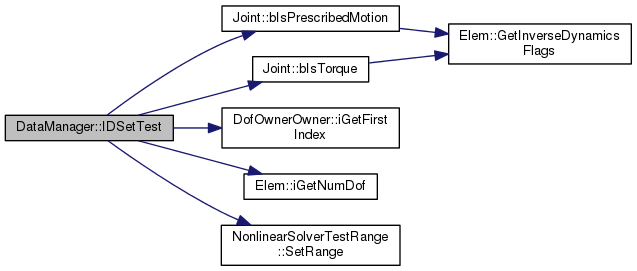
| virtual void | IDSetTest (NonlinearSolverTestRange *pResTest, NonlinearSolverTestRange *pSolTest, bool bFullResTest) |
| void | bSetStaticModel (bool b) |
| bool | bIsStaticModel (void) const |
| const RigidBodyKinematics * | pGetRBK (void) const |
| void | bSetInverseDynamics (bool b) |
| bool | bIsInverseDynamics (void) const |
| const LoadableCalls * | GetLoadableElemModule (std::string) const |
| void | SetLoadableElemModule (std::string, const LoadableCalls *, ModuleInsertMode=MIM_FAIL) |
| Drive * | pFindDrive (Drive::Type Typ, unsigned int uL) const |
| Elem * | pFindElem (Elem::Type Typ, unsigned int uElem=unsigned(-1)) const |
| template<class Tbase , Elem::Type type> | |
| Tbase * | pFindElem (unsigned int uElem=unsigned(-1)) const |
| template<class Tder , class Tbase , Elem::Type type> | |
| Tder * | pFindElem (unsigned int uElem=unsigned(-1)) const |
| const DataManager::ElemDataStructure & | GetElemDataStructure (Elem::Type Typ) const |
| std::vector< doublereal > & | GetBufIn (unsigned uL) |
| const std::vector< doublereal > & | GetBufOut (unsigned uL) const |
| doublereal * | GetBufInRaw (unsigned uL) |
| void | SetBufInRaw (unsigned uL, integer n, const doublereal *p) |
| const doublereal * | GetBufOutRaw (unsigned uL) const |
| void | SetBufOutRaw (unsigned uL, integer n, const doublereal *p) |
| void | ElemManager (void) |
| void | ElemManagerDestructor (void) |
| void | ElemDataInit (void) |
| void | ElemAssInit (void) |
| void | ElemOutputPrepare (OutputHandler &OH) |
| void | ElemOutput (OutputHandler &OH) const |
| void | ElemOutput (OutputHandler &OH, const VectorHandler &X, const VectorHandler &XP) const |
| void | DriveOutput (OutputHandler &OH) const |
| void | DriveTrace (OutputHandler &OH) const |
| DataManager::ElemContainerType::const_iterator | begin (Elem::Type t) const |
| DataManager::ElemContainerType::const_iterator | end (Elem::Type t) const |
| Node ** | ppFindNode (Node::Type Typ, unsigned int uNode) const |
| Node * | pFindNode (Node::Type Typ, unsigned int uNode) const |
| template<class Tbase , Node::Type type> | |
| Tbase * | pFindNode (unsigned int uNode) const |
| template<class Tder , class Tbase , Node::Type type> | |
| Tder * | pFindNode (unsigned int uNode) const |
| void | NodeManager (void) |
| void | NodeManagerDestructor (void) |
| void | NodeDataInit (void) |
| DataManager::NodeContainerType::const_iterator | begin (Node::Type t) const |
| DataManager::NodeContainerType::const_iterator | end (Node::Type t) const |
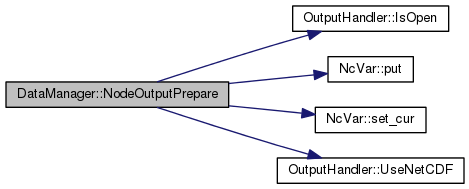
| void | NodeOutputPrepare (OutputHandler &OH) |
| void | NodeOutput (OutputHandler &OH) const |
| void | NodeOutput (OutputHandler &OH, const VectorHandler &X, const VectorHandler &XP) const |
| const DofVecType & | GetDofs (void) const |
| integer | iGetNumDofs (void) const |
| void | DofManager (void) |
| void | DofManagerDestructor (void) |
| void | DofDataInit (void) |
| void | DofInit (void) |
| void | IDDofInit (void) |
| int | iIDGetNodeTotNumDofs (void) const |
| int | iIDGetJointTotNumDofs (void) const |
| int | iIDGetTotNumDofs (void) const |
| void | SetScale (VectorHandler &XScale) const |
| const VectorHandler * | GetpXCurr (void) const |
| const VectorHandler * | GetpXPCurr (void) const |
| virtual void | PrintResidual (const VectorHandler &Res, integer iIterCnt) const |
| virtual void | PrintSolution (const VectorHandler &Sol, integer iIterCnt) const |
| virtual const std::string & | GetDofDescription (int i) const |
| virtual const std::string & | GetEqDescription (int i) const |
| virtual DofOrder::Order | GetDofType (int i) const |
| virtual DofOrder::Order | GetEqType (int i) const |
 Public Member Functions inherited from SolutionDataManager Public Member Functions inherited from SolutionDataManager | |
| virtual | ~SolutionDataManager (void) |
| Public Member Functions inherited from SolverDiagnostics | |
| SolverDiagnostics (unsigned OF=OUTPUT_DEFAULT, DriveCaller *pOM=0) | |
| virtual | ~SolverDiagnostics (void) |
| void | SetNoOutput (void) |
| void | SetOutputMeter (DriveCaller *pOM) |
| void | SetOutputDriveHandler (const DriveHandler *pDH) |
| void | SetOutputFlags (unsigned OF) |
| void | AddOutputFlags (unsigned OF) |
| void | DelOutputFlags (unsigned OF) |
| MatrixHandler::Norm_t | GetCondMatNorm (void) const |
| bool | outputMeter (void) const |
| bool | outputIters (void) const |
| bool | outputRes (void) const |
| bool | outputSol (void) const |
| bool | outputJac (void) const |
| bool | outputStep (void) const |
| bool | outputBailout (void) const |
| bool | outputCounter (void) const |
| bool | outputMatrixConditionNumber (void) const |
| bool | outputSolverConditionNumber (void) const |
| bool | outputSolverConditionStat (void) const |
| bool | outputCPUTime (void) const |
| bool | outputMsg (void) const |
Protected Types | |
| enum | PrintFlags { PRINT_NONE = 0x00U, PRINT_DOF_STATS = 0x01U, PRINT_DOF_DESCRIPTION = 0x02U, PRINT_EQ_DESCRIPTION = 0x04U, PRINT_DESCRIPTION = (PRINT_DOF_DESCRIPTION|PRINT_EQ_DESCRIPTION), PRINT_NODE_CONNECTION = 0x10U, PRINT_EL_CONNECTION = 0x20U, PRINT_CONNECTION = (PRINT_NODE_CONNECTION|PRINT_EL_CONNECTION), PRINT_TO_FILE = 0x1000U } |
| typedef std::vector < Converged::State > | Converged_t |
| typedef std::vector< Elem * > | ElemVecType |
| typedef std::vector< Node * > | NodeVecType |
| Protected Types inherited from SolverDiagnostics | |
| enum | { OUTPUT_NONE = 0x0000, OUTPUT_ITERS = 0x0001, OUTPUT_RES = 0x0002, OUTPUT_SOL = 0x0004, OUTPUT_JAC = 0x0008, OUTPUT_BAILOUT = 0x0010, OUTPUT_MSG = 0x0020, OUTPUT_COUNTER = 0x0040, OUTPUT_MAT_COND_NUM_1 = 0x0080, OUTPUT_MAT_COND_NUM_INF = 0x0100, OUTPUT_SOLVER_COND_NUM = 0x0200, OUTPUT_SOLVER_COND_STAT = 0x400, OUTPUT_CPU_TIME = 0x800, OUTPUT_MAT_COND_NUM = OUTPUT_MAT_COND_NUM_1 | OUTPUT_MAT_COND_NUM_INF, OUTPUT_DEFAULT = OUTPUT_MSG, OUTPUT_STEP = (OUTPUT_ITERS | OUTPUT_RES | OUTPUT_SOL | OUTPUT_JAC | OUTPUT_MAT_COND_NUM | OUTPUT_SOLVER_COND_NUM), OUTPUT_MASK = 0x07FF } |
Friends | |
| class | InitialAssemblyIterator |
|
protected |
| typedef DofVecType::iterator DataManager::DofIterator |
| typedef DofVecType::const_iterator DataManager::DofIterator_const |
| typedef std::vector<Dof> DataManager::DofVecType |
| typedef std::list<KeyElemPair> DataManager::ElemContainerType |
| typedef std::map<unsigned, ElemContainerType::iterator> DataManager::ElemMapToListType |
| typedef std::map<std::string, DataManager::ElemRead *, ltstrcase> DataManager::ElemReadType |
|
protected |
| typedef std::pair<unsigned, Elem*> DataManager::KeyElemPair |
| typedef std::pair<unsigned, Node*> DataManager::KeyNodePair |
| typedef std::list<KeyNodePair> DataManager::NodeContainerType |
| typedef std::map<unsigned, NodeContainerType::iterator> DataManager::NodeMapToListType |
| typedef std::map<std::string, DataManager::NodeRead *, ltstrcase> DataManager::NodeReadType |
|
protected |
| Enumerator | |
|---|---|
| NONE | |
| ISUNIQUE | |
| TOBEUSEDINASSEMBLY | |
| GENERATESINERTIAFORCES | |
| USESAIRPROPERTIES | |
| DEFAULTOUT | |
Definition at line 535 of file dataman.h.
| Enumerator | |
|---|---|
| ELEM | |
| DOFOWNER | |
| GRAVITYOWNER | |
| AIRPROPOWNER | |
| INITIALASSEMBLY | |
Definition at line 526 of file dataman.h.
| Enumerator | |
|---|---|
| NEVER | |
| ATEND | |
| ITERATIONS | |
| TIME | |
| TIMES | |
Definition at line 161 of file dataman.h.
| Enumerator | |
|---|---|
| MIM_FAIL | |
| MIM_REPLACE | |
| MIM_IGNORE | |
|
protected |
| Enumerator | |
|---|---|
| PRINT_NONE | |
| PRINT_DOF_STATS | |
| PRINT_DOF_DESCRIPTION | |
| PRINT_EQ_DESCRIPTION | |
| PRINT_DESCRIPTION | |
| PRINT_NODE_CONNECTION | |
| PRINT_EL_CONNECTION | |
| PRINT_CONNECTION | |
| PRINT_TO_FILE | |
Definition at line 141 of file dataman.h.
| enum DataManager::ResType |
| Enumerator | |
|---|---|
| RES_NONE | |
| RES_TEXT | |
| RES_NETCDF | |
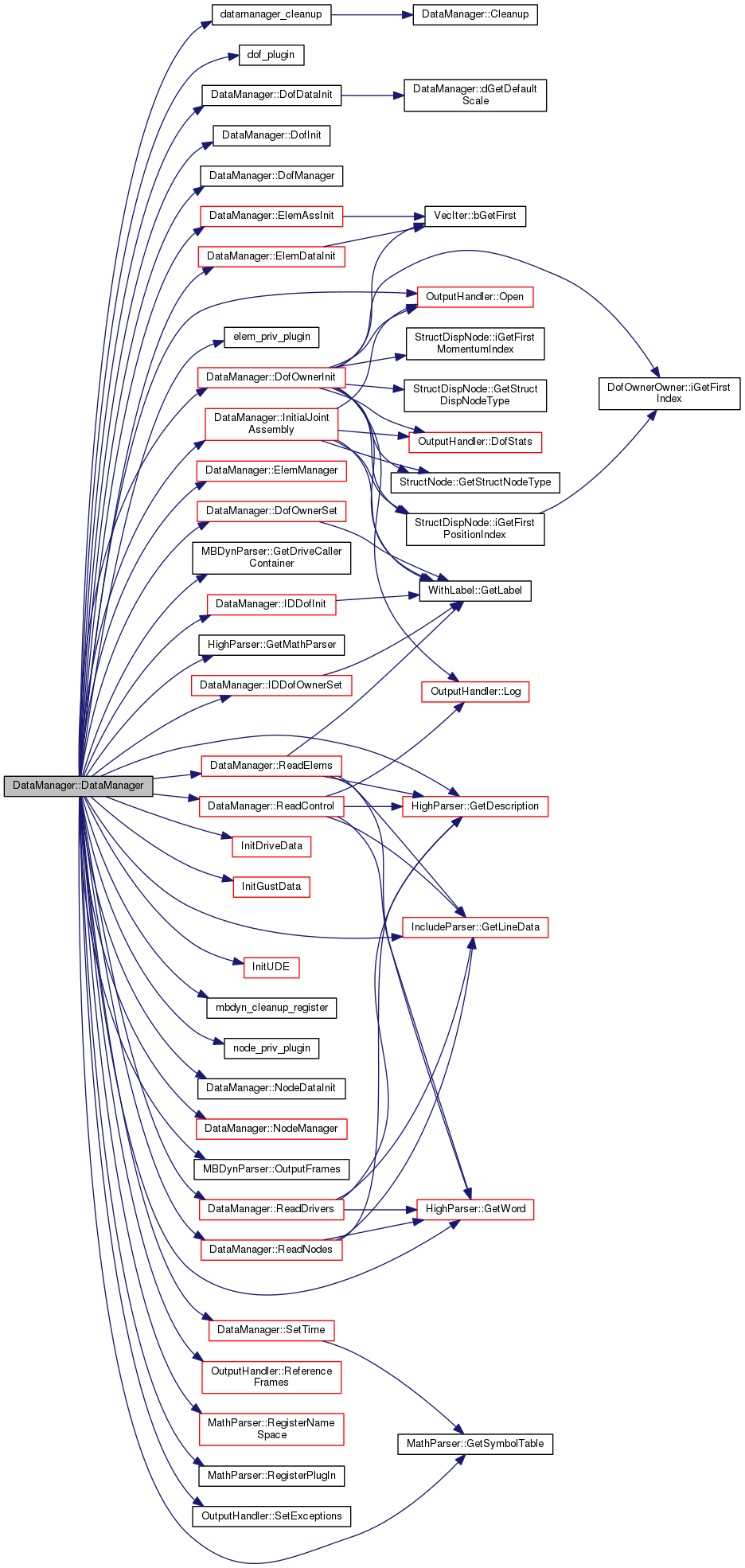
| DataManager::DataManager | ( | MBDynParser & | HP, |
| unsigned | OF, | ||
| Solver * | pS, | ||
| doublereal | dInitialTime, | ||
| const char * | sOutputFileName, | ||
| const char * | sInputFileName, | ||
| bool | bAbortAfterInput | ||
| ) |
Definition at line 90 of file dataman.cc.
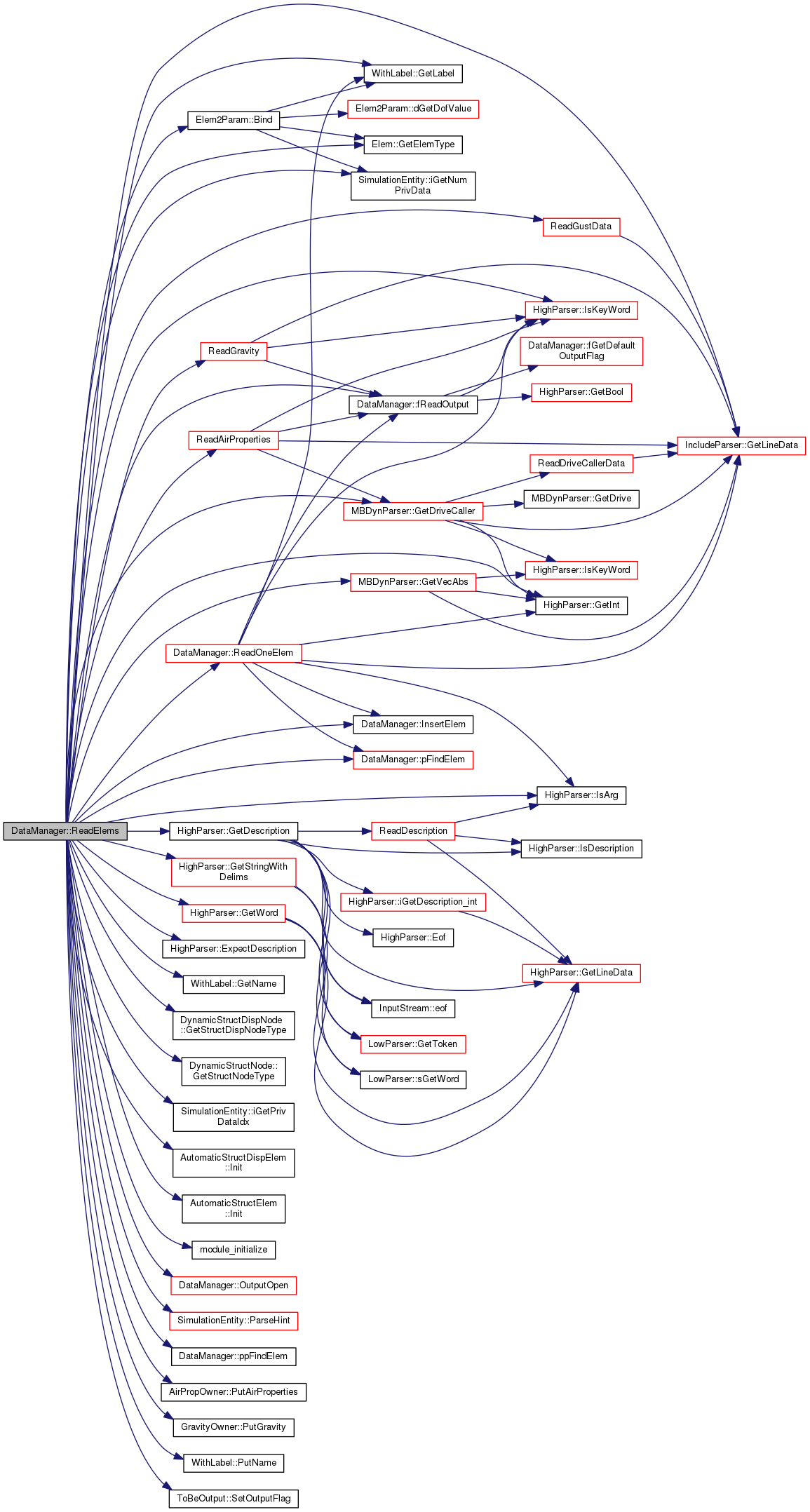
References bInitialJointAssemblyToBeDone, bInverseDynamics, bOutputFrames, bSkipInitialJointAssembly, datamanager_cleanup(), DEBUG_LEVEL_MATCH, DEBUGCERR, DEBUGCOUTFNAME, DEBUGLCOUT, dof_plugin(), DofData, DofDataInit(), DofInit(), DofManager(), DofOwnerInit(), DofOwners, DofOwnerSet(), Dofs, OutputHandler::DRIVECALLERS, DriveData, elem_priv_plugin(), ElemAssInit(), DataManager::ElemDataStructure::ElemContainer, ElemData, ElemDataInit(), ELEMENTS, ElemManager(), Elems, HighParser::GetDescription(), MBDynParser::GetDriveCallerContainer(), IncludeParser::GetLineData(), HighParser::GetMathParser(), MathParser::GetSymbolTable(), HighParser::GetWord(), IDDofInit(), IDDofOwnerSet(), InitDriveData(), InitGustData(), InitialJointAssembly(), InitUDE(), iTotDofs, iTotDrive, iTotNodes, DofOwner::LASTDOFTYPE, Drive::LASTDRIVETYPE, Elem::LASTELEMTYPE, LASTKEYWORD, Node::LASTNODETYPE, MathPar, mbdyn_cleanup_register(), MBDYN_EXCEPT_ARGS, MBPar, MYDEBUG_INIT, NO_OP, node_priv_plugin(), DataManager::NodeDataStructure::NodeContainer, NodeData, NodeDataInit(), NodeManager(), OutputHandler::Open(), OutHdl, OUTPUT, MBDynParser::OutputFrames(), ppCleanupData, psDofOwnerNames, psDriveNames, psElemNames, psNodeNames, ReadControl(), ReadDrivers(), ReadElems(), ReadNodes(), OutputHandler::REFERENCEFRAMES, OutputHandler::ReferenceFrames(), MathParser::RegisterNameSpace(), MathParser::RegisterPlugIn(), OutputHandler::SetExceptions(), SetTime(), OutputHandler::TRACES, and OutputHandler::UNKNOWN.
|
virtual |
Definition at line 618 of file dataman.cc.
References ATEND, DestroyDriveData(), DestroyGustData(), DestroyUDE(), DofManagerDestructor(), ElemManagerDestructor(), MakeRestart(), module_finalize(), NodeManagerDestructor(), pOutputMeter, ppCleanupData, pRBK, RestartEvery, SAFEDELETE, SAFEDELETEARR, and sSimulationTitle.

|
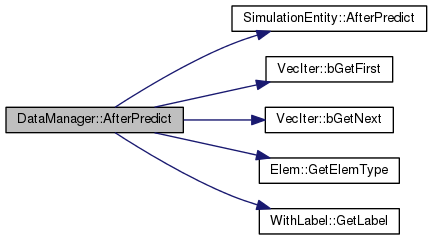
virtual |
Reimplemented in SchurDataManager.
Definition at line 2527 of file dataman2.cc.
References SimulationEntity::AfterConvergence(), ASSERT, VecIter< T >::bGetFirst(), VecIter< T >::bGetNext(), Solver::dGetInitialTimeStep(), DriveHandler::dGetTime(), dLastRestartTime, dRestartTime, DrvHdl, ElemIter, iCurrRestartIter, iCurrRestartTime, iNumRestartTimes, iRestartIterations, ITERATIONS, MakeRestart(), NEVER, Nodes, pdRestartTimes, pSolver, pXCurr, pXPrimeCurr, RestartEvery, TIME, and TIMES.
Referenced by DerivativeSolver::Advance(), Step1Integrator::Advance(), and Step2Integrator::Advance().

|
virtual |
Reimplemented in SchurDataManager.
Definition at line 2472 of file dataman2.cc.
References SimulationEntity::AfterPredict(), VecIter< T >::bGetFirst(), VecIter< T >::bGetNext(), ElemIter, Elem::GetElemType(), WithLabel::GetLabel(), m_IsConverged, Nodes, Converged::NOT_CONVERGED, psElemNames, psNodeNames, pXCurr, and pXPrimeCurr.
Referenced by DerivativeSolver::Advance(), Step1Integrator::Advance(), Step2Integrator::Advance(), and ThirdOrderIntegrator::Predict().
|
virtual |
Definition at line 94 of file invdataman.cc.
References ASSERT, DEBUGCOUT, ElemIter, Elems, and pWorkMat.
Referenced by InverseDynamicsStepSolver::Jacobian().
|
protected |
Definition at line 105 of file invdataman.cc.
References VariableSubMatrixHandler::AddToT(), ASSERT, Elem::AssJac(), Beam2::AssJac(), Elem::BEAM, Elem::bIsErgonomy(), Joint::bIsPrescribedMotion(), Joint::bIsTorque(), Elem::BODY, DEBUGCOUT, Body::dGetM(), DriveHandler::dGetTimeStep(), DrvHdl, DataManager::ElemDataStructure::ElemContainer, ElemData, InverseDynamics::FULLY_ACTUATED_COLLOCATED, InverseDynamics::FULLY_ACTUATED_NON_COLLOCATED, Body::GetJ(), InverseDynamicsStepSolver::GetOrder(), InverseSolver::GetProblemType(), Body::GetS(), InverseSolver::GetWeight(), DofOwnerOwner::iGetFirstIndex(), SimulationEntity::iGetNumDof(), Elem::iGetNumDof(), InverseDynamics::INVERSE_DYNAMICS, Elem::JOINT, Elem::JOINT_REGULARIZATION, MBDYN_EXCEPT_ARGS, DataManager::NodeDataStructure::NodeContainer, NodeData, Body::pGetNode(), Solver::pGetStepIntegrator(), InverseDynamics::POSITION, pSolver, pXCurr, MatrixHandler::Reset(), Node::STRUCTURAL, InverseDynamics::UNDERDETERMINED_FULLY_ACTUATED, and InverseDynamics::UNDERDETERMINED_UNDERACTUATED_COLLOCATED.

|
virtual |
Definition at line 303 of file invdataman.cc.
References DEBUGCOUT, ElemIter, and pWorkVec.
Referenced by InverseDynamicsStepSolver::Residual().
|
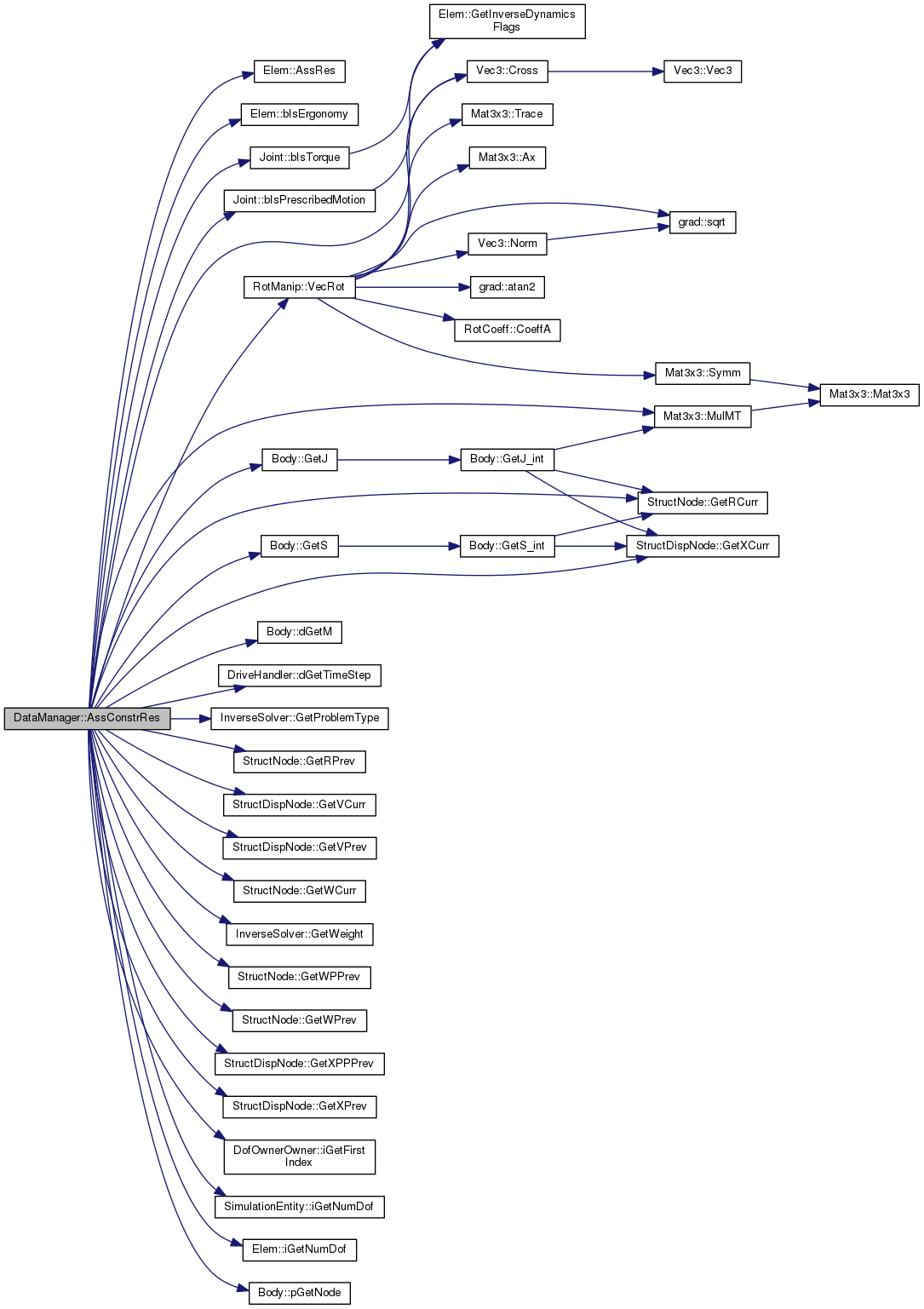
protected |
Definition at line 311 of file invdataman.cc.
References InverseDynamics::ACCELERATION, ASSERT, Elem::AssRes(), Elem::BEAM, Elem::bIsErgonomy(), Joint::bIsPrescribedMotion(), Joint::bIsTorque(), Elem::BODY, Vec3::Cross(), DEBUGCOUT, Body::dGetM(), DriveHandler::dGetTimeStep(), DrvHdl, DataManager::ElemDataStructure::ElemContainer, ElemData, InverseDynamics::FULLY_ACTUATED_COLLOCATED, InverseDynamics::FULLY_ACTUATED_NON_COLLOCATED, Body::GetJ(), InverseSolver::GetProblemType(), StructNode::GetRCurr(), StructNode::GetRPrev(), Body::GetS(), StructDispNode::GetVCurr(), StructDispNode::GetVPrev(), StructNode::GetWCurr(), InverseSolver::GetWeight(), StructNode::GetWPPrev(), StructNode::GetWPrev(), StructDispNode::GetXCurr(), StructDispNode::GetXPPPrev(), StructDispNode::GetXPrev(), DofOwnerOwner::iGetFirstIndex(), SimulationEntity::iGetNumDof(), Elem::iGetNumDof(), Elem::JOINT, MBDYN_EXCEPT_ARGS, Mat3x3::MulMT(), DataManager::NodeDataStructure::NodeContainer, NodeData, Body::pGetNode(), InverseDynamics::POSITION, pSolver, pXCurr, pXPrimeCurr, pXPrimePrimeCurr, Node::STRUCTURAL, InverseDynamics::UNDERDETERMINED_FULLY_ACTUATED, InverseDynamics::UNDERDETERMINED_UNDERACTUATED_COLLOCATED, RotManip::VecRot(), and InverseDynamics::VELOCITY.
|
virtual |
Reimplemented in SchurDataManager.
Definition at line 392 of file elman.cc.
References ASSERT, DEBUGCOUT, ElemIter, Elems, and pWorkMat.
Referenced by Solver::Eig(), ThirdOrderIntegrator::Jacobian(), DerivativeSolver::Jacobian(), and StepNIntegrator::Jacobian().
|
protectedvirtual |
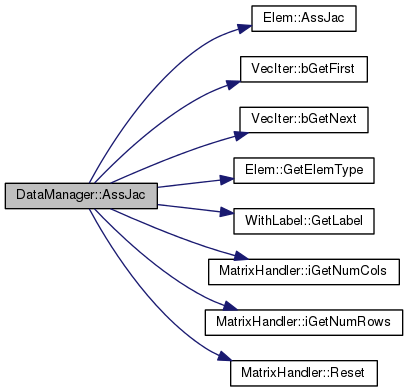
Definition at line 403 of file elman.cc.
References Elem::AssJac(), VecIter< T >::bGetFirst(), VecIter< T >::bGetNext(), c, DEBUGCOUT, Elem::GetElemType(), WithLabel::GetLabel(), MatrixHandler::iGetNumCols(), MatrixHandler::iGetNumRows(), MBDYN_EXCEPT_ARGS, psElemNames, pXCurr, pXPrimeCurr, and MatrixHandler::Reset().
|
virtual |
|
protectedvirtual |
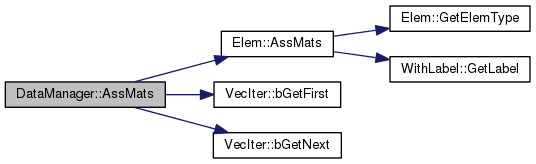
Definition at line 459 of file elman.cc.
References Elem::AssMats(), VecIter< T >::bGetFirst(), VecIter< T >::bGetNext(), DEBUGCOUT, pXCurr, and pXPrimeCurr.
|
virtual |
Implements SolutionDataManager.
Reimplemented in SchurDataManager.
Definition at line 498 of file elman.cc.
References DEBUGCOUT, ElemIter, and pWorkVec.
Referenced by AssRes(), ThirdOrderIntegrator::Jacobian(), StepNIntegrator::Jacobian(), ThirdOrderIntegrator::Residual(), DerivativeSolver::Residual(), StepNIntegrator::Residual(), and InverseDynamicsStepSolver::Residual().
|
virtual |
Definition at line 701 of file invdataman.cc.
References AssRes(), DEBUGCOUT, DataManager::ElemDataStructure::ElemContainer, ElemData, ElemIter, Elem::INERTIA, InverseDynamics::INVERSE_DYNAMICS, pWorkVec, pXCurr, pXPrimeCurr, and pXPrimePrimeCurr.

|
protectedvirtual |
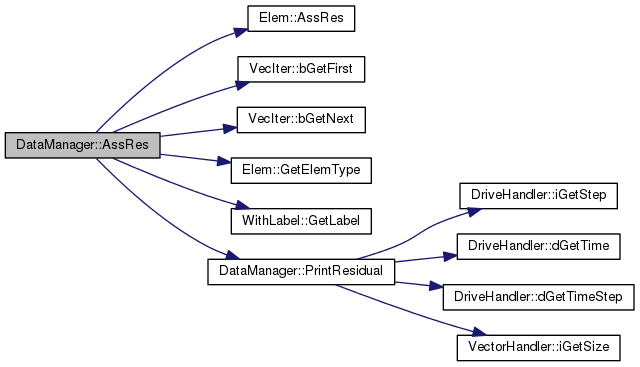
Definition at line 506 of file elman.cc.
References Elem::AssRes(), VecIter< T >::bGetFirst(), VecIter< T >::bGetNext(), DEBUGCOUT, Elem::GetElemType(), WithLabel::GetLabel(), MBDYN_EXCEPT_ARGS, PrintResidual(), psElemNames, pXCurr, and pXPrimeCurr.
|
protected |
Definition at line 725 of file invdataman.cc.
References Elem::AssRes(), Elem::BEAM, Elem::bIsRightHandSide(), Elem::BODY, DEBUGCOUT, DataManager::ElemDataStructure::ElemContainer, ElemData, Elem::FORCE, InverseDynamics::INVERSE_DYNAMICS, Elem::JOINT, Elem::LASTELEMTYPE, MBDYN_EXCEPT_ARGS, pXCurr, pXPrimeCurr, and pXPrimePrimeCurr.
| bool DataManager::bDoesOmegaRotate | ( | void | ) | const |
Definition at line 123 of file dataman2.cc.
References bOmegaRotates.
Referenced by ReadStructNode().
|
virtual |
Reimplemented in SchurDataManager.
Definition at line 2454 of file dataman2.cc.
References SimulationEntity::BeforePredict(), VecIter< T >::bGetFirst(), VecIter< T >::bGetNext(), ElemIter, and Nodes.
Referenced by Solver::Advance(), Solver::Prepare(), and Solver::Start().
| DataManager::ElemContainerType::const_iterator DataManager::begin | ( | Elem::Type | t | ) | const |
Definition at line 902 of file dataman.cc.
References DataManager::ElemDataStructure::ElemContainer, and ElemData.
Referenced by DofOwnerInit(), LoadIncNorm::LoadIncNorm(), and TimeStep::TimeStep().
| DataManager::NodeContainerType::const_iterator DataManager::begin | ( | Node::Type | t | ) | const |
Definition at line 890 of file dataman.cc.
References DataManager::NodeDataStructure::NodeContainer, and NodeData.
|
inline |
Definition at line 493 of file dataman.h.
References bInverseDynamics.
Referenced by ReadBeam2(), ReadBody(), and ReadVariableBody().
|
inline |
Definition at line 482 of file dataman.h.
References bStaticModel.
Referenced by ReadBody(), ReadStructNode(), and ReadVariableBody().
| bool DataManager::bOutputAccelerations | ( | void | ) | const |
Definition at line 878 of file dataman.cc.
References bOutputAccels.
Referenced by ReadStructNode().
| bool DataManager::bOutputDriveCallers | ( | void | ) | const |
Definition at line 884 of file dataman.cc.
References bOutputDriveCaller.
Referenced by DriveCallerRead::ReadOutput().
|
inline |
|
inline |
Definition at line 875 of file dataman.h.
References ASSERT, DrivenElem::bIsActive(), Elem::GetElemType(), WithLabel::GetLabel(), MBDYN_EXCEPT_ARGS, NestedElem::pGetElem(), and psElemNames.
| int DataManager::Cleanup | ( | void | ) |
Definition at line 668 of file dataman.cc.
Referenced by datamanager_cleanup().
| unsigned DataManager::ConvergedRegister | ( | void | ) |
Definition at line 2675 of file dataman2.cc.
References Converged::CONVERGED, and m_IsConverged.
Referenced by Converged::Register().
| void DataManager::ConvergedSet | ( | unsigned | idx, |
| Converged::State | s | ||
| ) |
Definition at line 2684 of file dataman2.cc.
References ASSERT, and m_IsConverged.
Referenced by Converged::Set().
|
virtual |
Reimplemented in SchurDataManager.
Definition at line 2587 of file dataman2.cc.
References VecIter< T >::bGetFirst(), VecIter< T >::bGetNext(), SimulationEntity::DerivativesUpdate(), ElemIter, Nodes, pXCurr, and pXPrimeCurr.
Referenced by DerivativeSolver::Update().
|
protected |
Definition at line 64 of file dofman.cc.
References DofData.
Referenced by DofDataInit(), and dReadScale().
| const doublereal & DataManager::dGetInitialPositionStiffness | ( | void | ) | const |
Definition at line 111 of file dataman2.cc.
References dInitialPositionStiffness.
Referenced by ReadStructNode().
| const doublereal & DataManager::dGetInitialVelocityStiffness | ( | void | ) | const |
Definition at line 117 of file dataman2.cc.
References dInitialVelocityStiffness.
Referenced by ReadStructNode().
| doublereal DataManager::dGetTime | ( | void | ) | const |
Definition at line 165 of file dataman2.cc.
References DriveHandler::dGetTime(), and DrvHdl.
Referenced by DerivativeSolver::Advance(), Step1Integrator::Advance(), Step2Integrator::Advance(), ModuleFMU::AssRes(), ThirdOrderIntegrator::Jacobian(), LineSearchSolver::LineSearch(), ModuleFMU::ModuleFMU(), ThirdOrderIntegrator::Residual(), InverseSolver::Restart(), Solver::Restart(), and LineSearchSolver::Solve().

| void DataManager::DofDataInit | ( | void | ) |
Definition at line 69 of file dofman.cc.
References DEBUGLCOUT, dGetDefaultScale(), DofData, DofOwners, iTotDofOwners, DofOwner::LASTDOFTYPE, MBDYN_EXCEPT_ARGS, and MYDEBUG_INIT.
Referenced by DataManager().

| void DataManager::DofInit | ( | void | ) |
Definition at line 111 of file dofman.cc.
References DEBUGCERR, DEBUGLCOUT, DofOrder::DIFFERENTIAL, DofOwners, Dofs, iTotDofOwners, iTotDofs, MBDYN_EXCEPT_ARGS, and MYDEBUG_INIT.
Referenced by DataManager().
| void DataManager::DofManager | ( | void | ) |
Definition at line 40 of file dofman.cc.
References DofData, DummyDofOwner, DofOwner::iFirstIndex, DofOwner::iNumDofs, and DofOwner::LASTDOFTYPE.
Referenced by DataManager().
| void DataManager::DofManagerDestructor | ( | void | ) |
|
protected |
Definition at line 182 of file dataman2.cc.
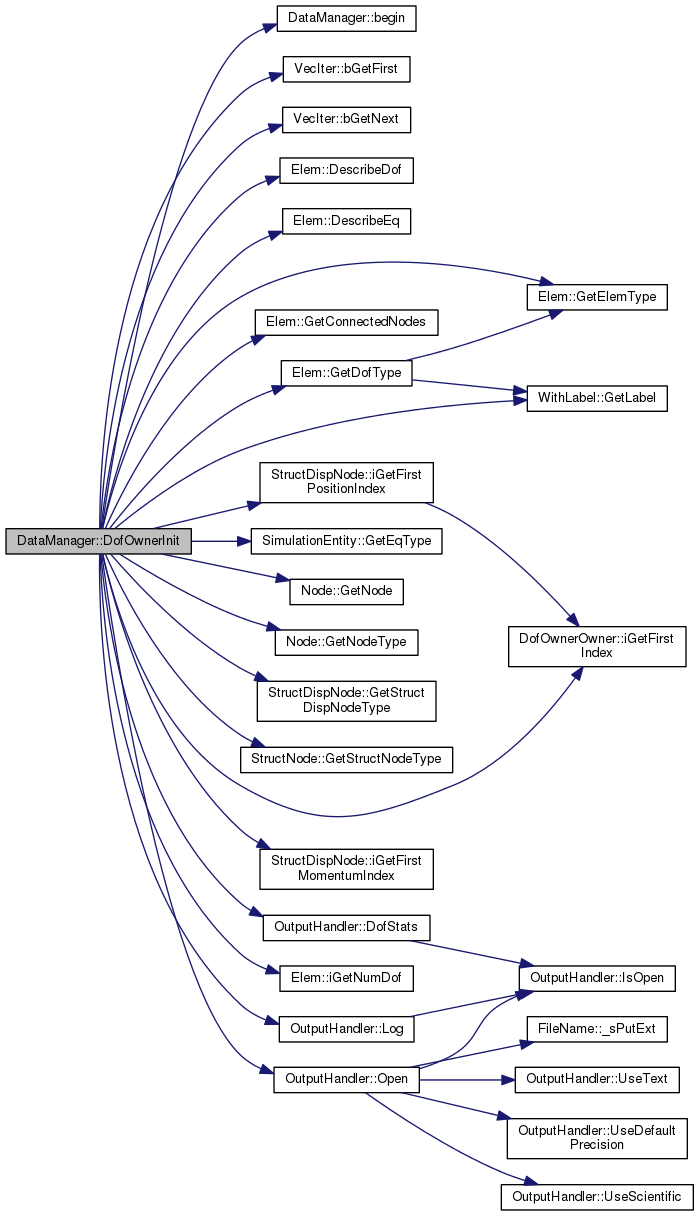
References ASSERT, begin(), VecIter< T >::bGetFirst(), VecIter< T >::bGetNext(), DEBUG_LEVEL_MATCH, DEBUGCOUTFNAME, DEBUGLCOUT, Elem::DescribeDof(), Elem::DescribeEq(), Dofs, OutputHandler::DOFSTATS, OutputHandler::DofStats(), StructNode::DUMMY, ElemIter, Elem::GetConnectedNodes(), Elem::GetDofType(), Elem::GetElemType(), SimulationEntity::GetEqType(), WithLabel::GetLabel(), Node::GetNode(), Node::GetNodeType(), StructDispNode::GetStructDispNodeType(), StructNode::GetStructNodeType(), DofOwnerOwner::iGetFirstIndex(), StructDispNode::iGetFirstMomentumIndex(), StructDispNode::iGetFirstPositionIndex(), Elem::iGetNumDof(), Node::LASTNODETYPE, OutputHandler::Log(), MYDEBUG_ASSEMBLY, MYDEBUG_INIT, DataManager::NodeDataStructure::NodeContainer, NodeData, Nodes, OutputHandler::Open(), OutHdl, PRINT_DOF_DESCRIPTION, PRINT_DOF_STATS, PRINT_EL_CONNECTION, PRINT_EQ_DESCRIPTION, PRINT_NODE_CONNECTION, PRINT_TO_FILE, psElemNames, psNodeNames, StructDispNode::STATIC, StructNode::STATIC, Node::STRUCTURAL, and uPrintFlags.
Referenced by DataManager().
|
protected |
Definition at line 1368 of file dataman2.cc.
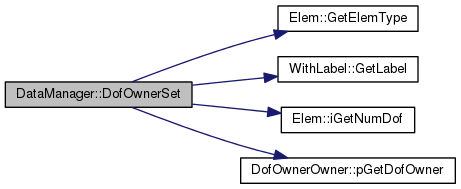
References DEBUGCOUTFNAME, DEBUGLCOUT, DataManager::ElemDataStructure::DofOwnerType, DataManager::ElemDataStructure::ElemContainer, ElemData, Elem::GetElemType(), WithLabel::GetLabel(), Elem::iGetNumDof(), DofOwner::iNumDofs, Elem::LASTELEMTYPE, MYDEBUG_INIT, Nodes, DofOwnerOwner::pGetDofOwner(), psElemNames, and DofOwner::UNKNOWN.
Referenced by DataManager().
| doublereal DataManager::dReadScale | ( | MBDynParser & | HP, |
| enum DofOwner::Type | t | ||
| ) | const |
Definition at line 1491 of file dataman3.cc.
References dGetDefaultScale(), HighParser::GetReal(), and HighParser::IsKeyWord().
Referenced by ReadNodes(), and ReadStructNode().

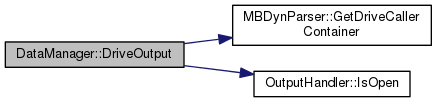
| void DataManager::DriveOutput | ( | OutputHandler & | OH | ) | const |
Definition at line 2429 of file dataman2.cc.
References OutputHandler::DRIVECALLERS, MBDynParser::GetDriveCallerContainer(), OutputHandler::IsOpen(), and MBPar.
Referenced by Output().
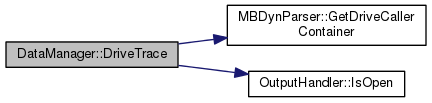
| void DataManager::DriveTrace | ( | OutputHandler & | OH | ) | const |
Definition at line 2415 of file dataman2.cc.
References MBDynParser::GetDriveCallerContainer(), OutputHandler::IsOpen(), MBPar, and OutputHandler::TRACES.
Referenced by Output().
| void DataManager::ElemAssInit | ( | void | ) |
Definition at line 318 of file elman.cc.
References ASSERT, VecIter< T >::bGetFirst(), VecIter< T >::bGetNext(), DEBUGCOUT, DEBUGLCOUT, ElemIter, iMaxWorkNumColsJac, iMaxWorkNumItemsJac, iMaxWorkNumRowsJac, iMaxWorkNumRowsRes, MYDEBUG_INIT, pWorkMat, pWorkMatA, pWorkMatB, pWorkVec, SAFENEWWITHCONSTRUCTOR, and Elem::WorkSpaceDim().
Referenced by DataManager().
| void DataManager::ElemDataInit | ( | void | ) |
Definition at line 248 of file elman.cc.
References VecIter< T >::bGetFirst(), VecIter< T >::bGetNext(), DEBUGCERR, DEBUGCOUT, DriveData, ElemData, ElemIter, Elems, DataManager::ElemDataStructure::iExpectedNum, VecIter< T >::Init(), iTotDrive, Drive::LASTDRIVETYPE, Elem::LASTELEMTYPE, ppDrive, and SAFENEWARR.
Referenced by DataManager().
| void DataManager::ElemManager | ( | void | ) |
Definition at line 51 of file elman.cc.
References OutputHandler::AERODYNAMIC, DofOwner::AERODYNAMIC, Elem::AERODYNAMIC, DofOwner::AEROMODAL, Elem::AEROMODAL, OutputHandler::AEROMODALS, Elem::AIRPROPERTIES, AIRPROPOWNER, OutputHandler::AIRPROPS, Elem::AUTOMATICSTRUCTURAL, Elem::BEAM, OutputHandler::BEAMS, Elem::BODY, Elem::BULK, DataManager::ElemDataStructure::DefaultOut(), DataManager::ElemDataStructure::Desc, DOFOWNER, DataManager::ElemDataStructure::DofOwnerType, DriveData, Elem::DRIVEN, DofOwner::ELECTRIC, Elem::ELECTRIC, DofOwner::ELECTRICBULK, Elem::ELECTRICBULK, ELEM, ElemData, EULER_123, Elem::EXTERNAL, OutputHandler::EXTERNALS, fDefaultOut, Elem::FORCE, OutputHandler::FORCES, DofOwner::GENEL, Elem::GENEL, OutputHandler::GENELS, DataManager::ElemDataStructure::GeneratesInertiaForces(), OutputHandler::GRAVITY, Elem::GRAVITY, GRAVITYOWNER, OutputHandler::HYDRAULIC, DofOwner::HYDRAULIC, Elem::HYDRAULIC, DataManager::ElemDataStructure::iDerivation, DataManager::ElemDataStructure::iExpectedNum, DofOwner::INDUCEDVELOCITY, Elem::INDUCEDVELOCITY, OutputHandler::INERTIA, Elem::INERTIA, INITIALASSEMBLY, DataManager::ElemDataStructure::IsUnique(), DofOwner::JOINT, Elem::JOINT, Elem::JOINT_REGULARIZATION, OutputHandler::JOINTS, Drive::LASTDRIVETYPE, Elem::LASTELEMTYPE, OutputHandler::LOADABLE, DofOwner::LOADABLE, Elem::LOADABLE, DataManager::ElemDataStructure::od, DataManager::ElemDataStructure::OutFile, AerodynamicOutput::OUTPUT_DEFAULT, Beam::OUTPUT_DEFAULT, DofOwner::PLATE, Elem::PLATE, OutputHandler::PLATES, OutputHandler::ROTORS, DataManager::ElemDataStructure::ShortDesc, DofOwner::THERMAL, Elem::THERMAL, OutputHandler::THERMALELEMENTS, DataManager::ElemDataStructure::ToBeUsedInAssembly(), DataManager::ElemDataStructure::uFlags, OutputHandler::UNKNOWN, DofOwner::UNKNOWN, DataManager::ElemDataStructure::uOutputFlags, and DataManager::ElemDataStructure::UsesAirProperties().
Referenced by DataManager().
| void DataManager::ElemManagerDestructor | ( | void | ) |
Definition at line 196 of file elman.cc.
References DEBUGCOUT, Elems, iTotDrive, ppDrive, psDriveNames, psElemNames, pWorkMatA, pWorkMatB, pWorkVec, SAFEDELETE, and SAFEDELETEARR.
Referenced by ~DataManager().
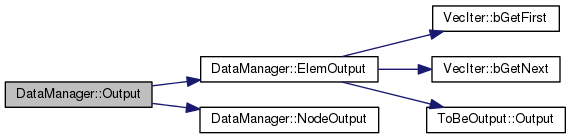
| void DataManager::ElemOutput | ( | OutputHandler & | OH | ) | const |
Definition at line 583 of file elman.cc.
References VecIter< T >::bGetFirst(), VecIter< T >::bGetNext(), ElemIter, and ToBeOutput::Output().
Referenced by Output().
| void DataManager::ElemOutput | ( | OutputHandler & | OH, |
| const VectorHandler & | X, | ||
| const VectorHandler & | XP | ||
| ) | const |
Definition at line 595 of file elman.cc.
References VecIter< T >::bGetFirst(), VecIter< T >::bGetNext(), ElemIter, and ToBeOutput::Output().
| void DataManager::ElemOutputPrepare | ( | OutputHandler & | OH | ) |
Definition at line 545 of file elman.cc.
References ASSERT, VecIter< T >::bGetFirst(), VecIter< T >::bGetNext(), DataManager::ElemDataStructure::ElemContainer, ElemData, ElemIter, OutputHandler::IsOpen(), Elem::LASTELEMTYPE, OutputHandler::NETCDF, ToBeOutput::OutputPrepare(), NcVar::put(), NcVar::set_cur(), and OutputHandler::UseNetCDF().
Referenced by OutputPrepare().
| DataManager::ElemContainerType::const_iterator DataManager::end | ( | Elem::Type | t | ) | const |
Definition at line 908 of file dataman.cc.
References DataManager::ElemDataStructure::ElemContainer, and ElemData.
Referenced by LoadIncNorm::LoadIncNorm(), and TimeStep::TimeStep().
| DataManager::NodeContainerType::const_iterator DataManager::end | ( | Node::Type | t | ) | const |
Definition at line 896 of file dataman.cc.
References DataManager::NodeDataStructure::NodeContainer, and NodeData.
| bool DataManager::EndOfSimulation | ( | void | ) | const |
Definition at line 2706 of file dataman2.cc.
References Converged::END_OF_SIMULATION, and m_IsConverged.
Referenced by Solver::Advance().
|
protected |
Definition at line 727 of file elman.cc.
References DataManager::ElemDataStructure::bDefaultOut(), and ElemData.
Referenced by fReadOutput().

|
protected |
Definition at line 171 of file nodeman.cc.
References DataManager::NodeDataStructure::bDefaultOut(), and NodeData.

| flag DataManager::fReadOutput | ( | MBDynParser & | HP, |
| const T & | t | ||
| ) | const |
Definition at line 1064 of file dataman.h.
References fGetDefaultOutputFlag(), HighParser::GetBool(), and HighParser::IsKeyWord().
Referenced by asynchronous_machine::asynchronous_machine(), LoadableElem::BindCalls(), CyclocopterNoInflow::CyclocopterNoInflow(), CyclocopterPolimi::CyclocopterPolimi(), CyclocopterUniform1D::CyclocopterUniform1D(), CyclocopterUniform2D::CyclocopterUniform2D(), HydrodynamicPlainBearing::HydrodynamicPlainBearing(), InlineFriction::InlineFriction(), LoadIncForce::LoadIncForce(), LoadIncNorm::LoadIncNorm(), ModuleFMU::ModuleFMU(), ModuleIMU::ModuleIMU(), ModuleIMUConstraint::ModuleIMUConstraint(), ModuleMDS::ModuleMDS(), ModuleNonsmoothNode::ModuleNonsmoothNode(), ReadAerodynamicBeam(), ReadAerodynamicBeam2(), ReadAerodynamicBody(), ReadAerodynamicModal(), ReadAircraftInstruments(), ReadAirProperties(), ReadBeam(), ReadBeam2(), ReadBody(), ReadBulk(), ReadElectric(), ReadElems(), ReadForce(), ReadGenel(), ReadGenericAerodynamicForce(), ReadGravity(), ReadHBeam(), ReadHydraulicElem(), ReadJoint(), ReadMembrane4EAS(), ReadModal(), ReadModalExtForce(), ReadModalForce(), ReadModalMappingExtForce(), ReadNodes(), ReadOneElem(), ReadRotor(), ReadShell4EAS(), ReadShell4EASANS(), ReadStructExtForce(), ReadStructMappingExtForce(), ReadStructNode(), ReadStructuralForce(), ReadThermal(), ReadVariableBody(), Wheel2::Wheel2(), and Wheel4::Wheel4().

| std::vector< doublereal > & DataManager::GetBufIn | ( | unsigned | uL | ) |
Definition at line 2720 of file dataman2.cc.
References Drive::FILEDRIVE, BufferStreamDrive::GetBuf(), MBDYN_EXCEPT_ARGS, and pFindDrive().

| doublereal * DataManager::GetBufInRaw | ( | unsigned | uL | ) |
Definition at line 2750 of file dataman2.cc.
References Drive::FILEDRIVE, BufferStreamDrive_base::GetBufRaw(), MBDYN_EXCEPT_ARGS, and pFindDrive().

| const std::vector< doublereal > & DataManager::GetBufOut | ( | unsigned | uL | ) | const |
Definition at line 2738 of file dataman2.cc.
References BufferStreamElem::GetBuf(), and MBDYN_EXCEPT_ARGS.

| const doublereal * DataManager::GetBufOutRaw | ( | unsigned | uL | ) | const |
Definition at line 2792 of file dataman2.cc.
References BufferStreamElem_base::GetBufRaw(), and MBDYN_EXCEPT_ARGS.

|
inlinevirtual |
Definition at line 254 of file dataman.h.
Referenced by Solver::GetCPUTime().
|
virtual |
Definition at line 2635 of file dataman2.cc.
References ASSERT, Dofs, and iTotDofs.
Referenced by Solver::Advance(), InitialJointAssembly(), Solver::Prepare(), and Solver::Start().
|
inline |
Definition at line 806 of file dataman.h.
References Dofs.
Referenced by StepIntegrator::SetDataManager().
|
virtual |
|
inline |
Definition at line 661 of file dataman.h.
References ElemData.
Referenced by ModelNameSpace::FindFunc(), and ModelNameSpace::GetFunc().
|
virtual |
|
virtual |
| const LoadableCalls * DataManager::GetLoadableElemModule | ( | std::string | name | ) | const |
Definition at line 58 of file dataman2.cc.
References MapOfLoadableElemHandlers.
Referenced by LoadableElemRead::Read(), and SetLoadableElemModule().
|
inline |
Definition at line 326 of file dataman.h.
References OutputHandler::Log(), and OutHdl.
Referenced by asynchronous_machine::asynchronous_machine(), SocketStreamOutputElemCreator::createSocketStreamOutElem(), HydrodynamicPlainBearing::HydrodynamicPlainBearing(), InlineFriction::InlineFriction(), InverseSolver::Prepare(), Solver::Prepare(), NodeDistDCR::Read(), ReadAerodynamicBeam(), ReadAerodynamicBeam2(), ReadAerodynamicBody(), ReadBeam(), ReadBeam2(), ReadBody(), ReadJoint(), ReadMembrane4EAS(), ReadModal(), ReadShell4EAS(), ReadShell4EASANS(), ReadStructNode(), ReadStructuralForce(), ReadThermal(), ReadVariableBody(), Wheel2::Wheel2(), and Wheel4::Wheel4().

|
inline |
Definition at line 341 of file dataman.h.
References MathPar.
Referenced by DriveHint::pCreateDrive(), TplDriveHint< T >::pCreateDrive(), and TplVecHint< T >::pCreateVec().
|
inline |
Definition at line 342 of file dataman.h.
References MBPar.
Referenced by ModelNameSpace::FindFunc(), and ModelNameSpace::GetFunc().
| OrientationDescription DataManager::GetOrientationDescription | ( | void | ) | const |
Definition at line 857 of file dataman.cc.
References od.
Referenced by ModuleIMUConstraint::ModuleIMUConstraint(), and ReadOptionalOrientationDescription().
|
inline |
Definition at line 325 of file dataman.h.
References OutHdl, and OutputHandler::Output().
Referenced by InverseSolver::Advance(), Solver::Advance(), output_eigenvalues(), InverseSolver::Prepare(), Solver::Prepare(), and Solver::Start().

| void DataManager::GetOutput | ( | Elem::Type | t, |
| unsigned & | flags, | ||
| OrientationDescription & | od | ||
| ) | const |
Definition at line 871 of file dataman.cc.
References ElemData, DataManager::ElemDataStructure::od, and DataManager::ElemDataStructure::uOutputFlags.
Referenced by ReadOptionalAerodynamicCustomOutput(), and ReadOptionalBeamCustomOutput().
|
inline |
Definition at line 853 of file dataman.h.
References pXCurr.
Referenced by LineSearchSolver::LineSearch(), and LineSearchSolver::Solve().
|
inline |
Definition at line 857 of file dataman.h.
References pXPrimeCurr.
Referenced by LineSearchSolver::LineSearch(), and LineSearchSolver::Solve().
|
inline |
Definition at line 343 of file dataman.h.
References pSolver.
Referenced by InverseDynamicsStepSolver::Advance(), ModuleFMU::ModuleFMU(), and InverseDynamicsStepSolver::Update().
|
virtual |
Definition at line 834 of file invdataman.cc.
References SimulationEntity::AfterConvergence(), VecIter< T >::bGetFirst(), VecIter< T >::bGetNext(), DEBUGCOUTFNAME, ElemIter, Nodes, pXCurr, pXPrimeCurr, and pXPrimePrimeCurr.
Referenced by InverseDynamicsStepSolver::Advance().
| void DataManager::IDDofInit | ( | void | ) |
Definition at line 895 of file invdataman.cc.
References ASSERT, Elem::BEAM, Elem::bIsErgonomy(), Joint::bIsPrescribedMotion(), Elem::bIsRightHandSide(), Joint::bIsTorque(), bOutputAccels, DEBUGCERR, DEBUGLCOUT, DofOrder::DIFFERENTIAL, DofData, DofOwners, Dofs, DataManager::ElemDataStructure::ElemContainer, ElemData, InverseDynamics::FULLY_ACTUATED_COLLOCATED, InverseDynamics::FULLY_ACTUATED_NON_COLLOCATED, WithLabel::GetLabel(), DofOwner::iFirstIndex, iIDJointTotNumDofs, iIDNodeTotNumDofs, DofOwner::iNumDofs, iTotDofOwners, iTotDofs, Elem::JOINT, MBDYN_EXCEPT_ARGS, MYDEBUG_INIT, DataManager::NodeDataStructure::NodeContainer, NodeData, DofOwnerOwner::pGetDofOwner(), pSolver, Node::STRUCTURAL, DofOwner::STRUCTURALNODE, InverseDynamics::UNDERDETERMINED_FULLY_ACTUATED, and InverseDynamics::UNDERDETERMINED_UNDERACTUATED_COLLOCATED.
Referenced by DataManager().

|
protected |
Definition at line 852 of file invdataman.cc.
References DEBUGCOUTFNAME, DEBUGLCOUT, DataManager::ElemDataStructure::DofOwnerType, DataManager::ElemDataStructure::ElemContainer, ElemData, Elem::GetElemType(), WithLabel::GetLabel(), Elem::iGetNumDof(), iIDJointTotNumDofs, iIDNodeTotNumDofs, DofOwner::iNumDofs, Elem::JOINT, Elem::LASTELEMTYPE, MYDEBUG_INIT, Nodes, DofOwnerOwner::pGetDofOwner(), psElemNames, and DofOwner::UNKNOWN.
Referenced by DataManager().
|
virtual |
Definition at line 1111 of file invdataman.cc.
References Joint::bIsPrescribedMotion(), Joint::bIsTorque(), DataManager::ElemDataStructure::ElemContainer, ElemData, DofOwnerOwner::iGetFirstIndex(), Elem::iGetNumDof(), Elem::JOINT, Nodes, and NonlinearSolverTestRange::SetRange().
Referenced by InverseSolver::Prepare().
|
inline |
Definition at line 809 of file dataman.h.
Referenced by ThirdOrderIntegrator::Advance(), Step1Integrator::Advance(), Step2Integrator::Advance(), ThirdOrderIntegrator::Jacobian(), InverseSolver::Prepare(), Solver::Prepare(), ThirdOrderIntegrator::RealPredictDof(), ThirdOrderIntegrator::Residual(), and ThirdOrderIntegrator::UpdateDof().
| int DataManager::iIDGetJointTotNumDofs | ( | void | ) | const |
| int DataManager::iIDGetNodeTotNumDofs | ( | void | ) | const |
| int DataManager::iIDGetTotNumDofs | ( | void | ) | const |
Definition at line 1092 of file invdataman.cc.
References ASSERT, InverseDynamics::FULLY_ACTUATED_COLLOCATED, InverseDynamics::FULLY_ACTUATED_NON_COLLOCATED, iIDJointTotNumDofs, iIDNodeTotNumDofs, MBDYN_EXCEPT_ARGS, pSolver, InverseDynamics::UNDERDETERMINED_FULLY_ACTUATED, and InverseDynamics::UNDERDETERMINED_UNDERACTUATED_COLLOCATED.
| void DataManager::IncElemCount | ( | Elem::Type | type | ) |
Definition at line 129 of file dataman2.cc.
References ElemData, and DataManager::ElemDataStructure::iExpectedNum.
Referenced by ReadStructNode().
|
protected |
Definition at line 679 of file dataman2.cc.
References VectorHandler::Add(), ASSERT, ASSERTMSG, SolutionManager::bGetConditionNumber(), StructNode::bOmegaRotates(), CurrSolver, DEBUG_LEVEL_MATCH, DEBUGLCOUT, defaultMemoryManager, dEpsilon, Elem::DescribeDof(), StructDispNode::DescribeDof(), Elem::DescribeEq(), StructDispNode::DescribeEq(), StructDispNode::dGetPositionStiffness(), StructDispNode::dGetVelocityStiffness(), dInitialAssemblyTol, DofData, DataManager::ElemDataStructure::DofOwnerType, Dofs, OutputHandler::DOFSTATS, OutputHandler::DofStats(), VectorHandler::Dot(), MyVectorHandler::Dot(), StructNode::DUMMY, DataManager::ElemDataStructure::ElemContainer, ElemData, GetDofDescription(), Elem::GetElemType(), InitialAssemblyIterator::GetFirst(), WithLabel::GetLabel(), InitialAssemblyIterator::GetNext(), StructDispNode::GetNodeType(), StructNode::GetRCurr(), StructNode::GetRPrev(), LinSol::GetSolutionManager(), StructNode::GetStructNodeType(), StructDispNode::GetVCurr(), StructDispNode::GetVPrev(), StructNode::GetWCurr(), StructNode::GetWPrev(), StructDispNode::GetXCurr(), StructDispNode::GetXPrev(), LinearSolver::ErrFactor::iCol, DofOwner::iFirstIndex, StructDispNode::iGetFirstPositionIndex(), StructDispNode::iGetInitialNumDof(), SubjectToInitialAssembly::iGetInitialNumDof(), iMaxInitialIterations, SubjectToInitialAssembly::InitialAssJac(), SubjectToInitialAssembly::InitialAssRes(), SubjectToInitialAssembly::InitialWorkSpaceDim(), iNum, DofOwner::iNumDofs, iTotDofs, DofOwner::JOINT, Elem::LASTELEMTYPE, LinkToSolution(), SolutionManager::MatrInitialize(), MBDYN_EXCEPT_ARGS, Mat3x3::MulMT(), Mat3x3::MulTV(), MYDEBUG_ASSEMBLY, MYDEBUG_INIT, MYDEBUG_JAC, MYDEBUG_MEM, MYDEBUG_RESIDUAL, DataManager::NodeDataStructure::NodeContainer, NodeData, OutputHandler::Open(), OutHdl, SolverDiagnostics::outputIters(), SolverDiagnostics::outputJac(), SolverDiagnostics::outputRes(), SolverDiagnostics::outputSol(), SolverDiagnostics::outputSolverConditionNumber(), CGR_Rot::Param, DofOwnerOwner::pGetDofOwner(), SolutionManager::pMatHdl(), SolutionManager::pResHdl(), PRINT_DOF_DESCRIPTION, PRINT_DOF_STATS, PRINT_EQ_DESCRIPTION, PRINT_TO_FILE, PrintResidual(), PrintSolution(), psElemNames, psNodeNames, SolutionManager::pSolHdl(), MatrixHandler::PutCoef(), R, VectorHandler::Reset(), MyVectorHandler::Reset(), SAFEDELETE, DofOwnerOwner::SetInitialValue(), SolutionManager::Solve(), grad::sqrt(), Node::STRUCTURAL, DofOwner::STRUCTURALNODE, DofOwner::UNKNOWN, and uPrintFlags.
Referenced by DataManager().
|
inlineprotected |
Definition at line 595 of file dataman.h.
References DataManager::ElemDataStructure::ElemContainer, and DataManager::ElemDataStructure::ElemMapToList.
Referenced by ReadElems(), and ReadOneElem().
|
inlineprotected |
Definition at line 735 of file dataman.h.
References DataManager::NodeDataStructure::NodeContainer, and DataManager::NodeDataStructure::NodeMapToList.
Referenced by ReadNodes().
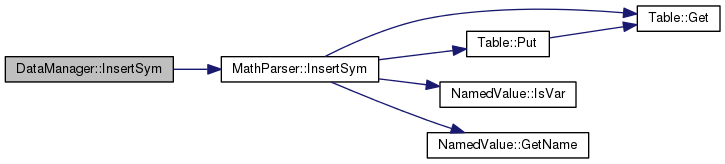
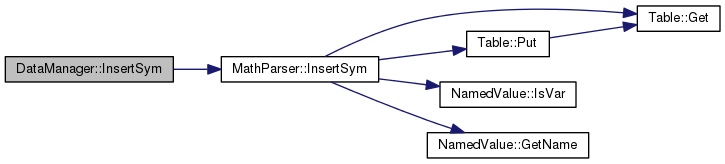
| NamedValue * DataManager::InsertSym | ( | const char *const | s, |
| const Real & | v, | ||
| int | redefine = 0 |
||
| ) |
Definition at line 838 of file dataman.cc.
References MathParser::InsertSym(), and MathPar.
| NamedValue * DataManager::InsertSym | ( | const char *const | s, |
| const Int & | v, | ||
| int | redefine = 0 |
||
| ) |
Definition at line 844 of file dataman.cc.
References MathParser::InsertSym(), and MathPar.
| bool DataManager::IsConverged | ( | void | ) | const |
Definition at line 2692 of file dataman2.cc.
References m_IsConverged, and Converged::NOT_CONVERGED.
Referenced by NonlinearSolver::MakeResTest(), and NonlinearSolver::MakeSolTest().
|
virtual |
Implements SolutionDataManager.
Definition at line 172 of file dataman2.cc.
References DrvHdl, DriveHandler::LinkToSolution(), pXCurr, and pXPrimeCurr.
Referenced by ThirdOrderIntegrator::Advance(), DerivativeSolver::Advance(), Step1Integrator::Advance(), Step2Integrator::Advance(), InverseDynamicsStepSolver::Advance(), InitialJointAssembly(), ThirdOrderIntegrator::Jacobian(), ThirdOrderIntegrator::Predict(), InverseSolver::Prepare(), Solver::Prepare(), and ThirdOrderIntegrator::Residual().

| void DataManager::LinkToSolution | ( | VectorHandler & | XCurr, |
| VectorHandler & | XPrimeCurr, | ||
| VectorHandler & | XPrimePrimeCurr, | ||
| VectorHandler & | LambdaCurr | ||
| ) |
Definition at line 81 of file invdataman.cc.
References DrvHdl, DriveHandler::LinkToSolution(), pLambdaCurr, pXCurr, pXPrimeCurr, and pXPrimePrimeCurr.

|
virtual |
Definition at line 699 of file dataman.cc.
References OutputHandler::Close(), dInitialAssemblyTol, dInitialPositionStiffness, dInitialVelocityStiffness, DriveData, DataManager::ElemDataStructure::ElemContainer, ElemData, Elems, VectorHandler::iGetSize(), iMaxInitialIterations, iNum, iTotDrive, Drive::LASTDRIVETYPE, Elem::LASTELEMTYPE, Node::LASTNODETYPE, DataManager::NodeDataStructure::NodeContainer, NodeData, Nodes, OutHdl, Node::PARAMETER, VectorHandler::pdGetVec(), ppDrive, pSolver, psReadControlDrivers, psReadControlElems, psReadControlNodes, pXCurr, pXPrimeCurr, OutputHandler::RESTART, OutputHandler::Restart(), Solver::Restart(), RestartEvery, OutputHandler::RestartOpen(), OutputHandler::RESTARTXSOL, OutputHandler::RestartXSol(), saveXSol, and sSimulationTitle.
Referenced by AfterConvergence(), and ~DataManager().
| void DataManager::NodeDataInit | ( | void | ) |
Definition at line 98 of file nodeman.cc.
References DEBUGCOUT, DataManager::NodeDataStructure::iExpectedNum, iTotNodes, Node::LASTNODETYPE, NodeData, and Nodes.
Referenced by DataManager().
| void DataManager::NodeManager | ( | void | ) |
Definition at line 44 of file nodeman.cc.
References OutputHandler::ABSTRACT, Node::ABSTRACT, DataManager::NodeDataStructure::DefaultOut(), DataManager::NodeDataStructure::Desc, OutputHandler::ELECTRIC, Node::ELECTRIC, fDefaultOut, Node::HYDRAULIC, DataManager::NodeDataStructure::iExpectedNum, Node::LASTNODETYPE, NodeData, DataManager::NodeDataStructure::OutFile, Node::PARAMETER, OutputHandler::PARAMETERS, OutputHandler::PRESNODES, DataManager::NodeDataStructure::ShortDesc, OutputHandler::STRNODES, Node::STRUCTURAL, Node::THERMAL, OutputHandler::THERMALNODES, DataManager::NodeDataStructure::uFlags, and OutputHandler::UNKNOWN.
Referenced by DataManager().

| void DataManager::NodeManagerDestructor | ( | void | ) |
Definition at line 84 of file nodeman.cc.
References DEBUGCOUT, Nodes, psNodeNames, and SAFEDELETE.
Referenced by ~DataManager().
| void DataManager::NodeOutput | ( | OutputHandler & | OH | ) | const |
| void DataManager::NodeOutput | ( | OutputHandler & | OH, |
| const VectorHandler & | X, | ||
| const VectorHandler & | XP | ||
| ) | const |
| void DataManager::NodeOutputPrepare | ( | OutputHandler & | OH | ) |
Definition at line 119 of file nodeman.cc.
References ASSERT, OutputHandler::IsOpen(), Node::LASTNODETYPE, OutputHandler::NETCDF, DataManager::NodeDataStructure::NodeContainer, NodeData, Nodes, NcVar::put(), NcVar::set_cur(), and OutputHandler::UseNetCDF().
Referenced by OutputPrepare().
|
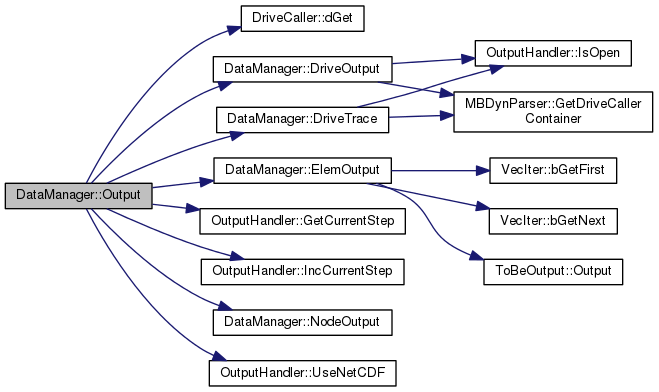
virtual |
Definition at line 2355 of file dataman2.cc.
References DriveCaller::dGet(), DriveOutput(), DriveTrace(), ElemOutput(), OutputHandler::GetCurrentStep(), OutputHandler::IncCurrentStep(), OutputHandler::NETCDF, NodeOutput(), OutHdl, pOutputMeter, and OutputHandler::UseNetCDF().
Referenced by InverseSolver::Advance(), Solver::Advance(), Solver::Prepare(), and Solver::Start().
|
virtual |
Definition at line 2444 of file dataman2.cc.
References ElemOutput(), NodeOutput(), and OutHdl.
| bool DataManager::OutputEigClose | ( | void | ) |
Definition at line 2348 of file dataman2.cc.
References OutputHandler::Close(), OutputHandler::EIGENANALYSIS, and OutHdl.
Referenced by Solver::Eig().

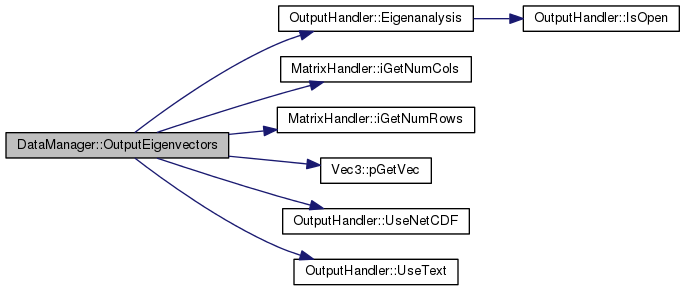
| void DataManager::OutputEigenvectors | ( | const VectorHandler * | pBeta, |
| const VectorHandler & | R, | ||
| const VectorHandler & | I, | ||
| const doublereal & | dShiftR, | ||
| const MatrixHandler * | pVL, | ||
| const MatrixHandler & | VR, | ||
| const std::vector< bool > & | vOut, | ||
| const unsigned | uCurrEigSol, | ||
| const int | iResultsPrecision | ||
| ) |
Definition at line 1999 of file dataman2.cc.
References ASSERT, ASSERTMSG, c, count, OutputHandler::EIGENANALYSIS, OutputHandler::Eigenanalysis(), MatrixHandler::iGetNumCols(), MatrixHandler::iGetNumRows(), iSize, OutputHandler::NETCDF, OutHdl, Vec3::pGetVec(), R, OutputHandler::UseNetCDF(), and OutputHandler::UseText().
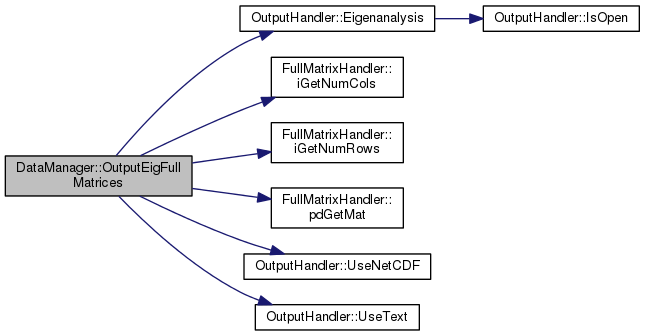
| void DataManager::OutputEigFullMatrices | ( | const MatrixHandler * | pmMatA, |
| const MatrixHandler * | pmMatB, | ||
| const unsigned | uCurrEigSol, | ||
| const int | iMatrixPrecision | ||
| ) |
Definition at line 1565 of file dataman2.cc.
References c, OutputHandler::EIGENANALYSIS, OutputHandler::Eigenanalysis(), FullMatrixHandler::iGetNumCols(), FullMatrixHandler::iGetNumRows(), OutputHandler::NETCDF, OutHdl, FullMatrixHandler::pdGetMat(), OutputHandler::UseNetCDF(), and OutputHandler::UseText().
Referenced by Solver::Eig().
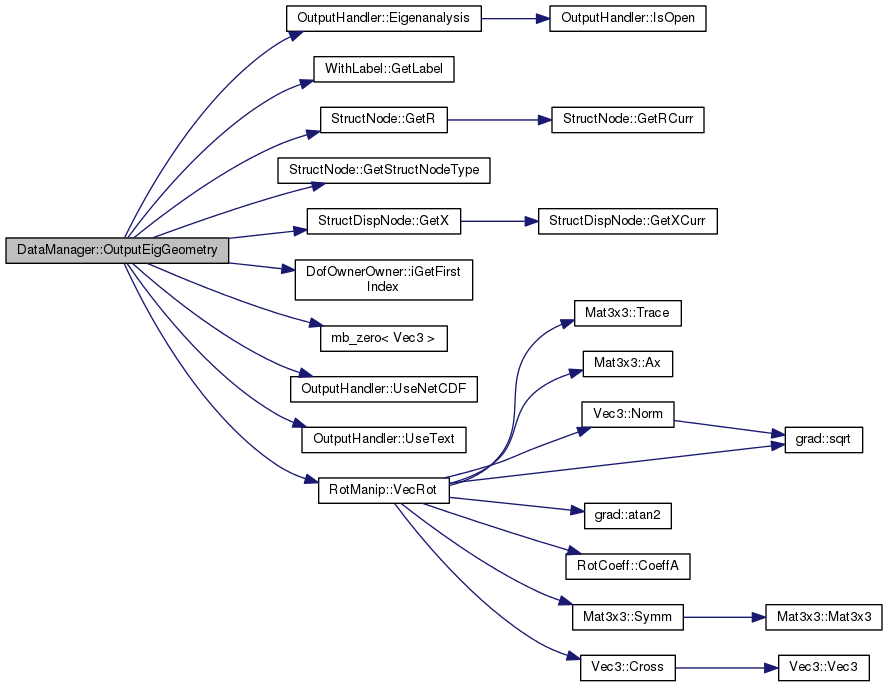
| void DataManager::OutputEigGeometry | ( | const unsigned | uCurrSol, |
| const int | iResultsPrecision | ||
| ) |
Definition at line 1880 of file dataman2.cc.
References ASSERT, count, StructNode::DUMMY, OutputHandler::EIGENANALYSIS, OutputHandler::Eigenanalysis(), WithLabel::GetLabel(), StructNode::GetR(), StructNode::GetStructNodeType(), StructDispNode::GetX(), DofOwnerOwner::iGetFirstIndex(), mb_zero< Vec3 >(), OutputHandler::NETCDF, DataManager::NodeDataStructure::NodeContainer, NodeData, OutHdl, Node::STRUCTURAL, OutputHandler::UseNetCDF(), OutputHandler::UseText(), and RotManip::VecRot().
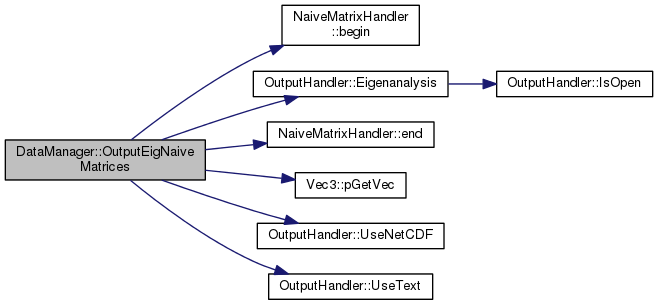
| void DataManager::OutputEigNaiveMatrices | ( | const MatrixHandler * | pmMatA, |
| const MatrixHandler * | pmMatB, | ||
| const unsigned | uCurrEigSol, | ||
| const int | iMatrixPrecision | ||
| ) |
Definition at line 1754 of file dataman2.cc.
References NaiveMatrixHandler::begin(), OutputHandler::EIGENANALYSIS, OutputHandler::Eigenanalysis(), NaiveMatrixHandler::end(), OutputHandler::NETCDF, OutHdl, Vec3::pGetVec(), OutputHandler::UseNetCDF(), and OutputHandler::UseText().
Referenced by Solver::Eig().
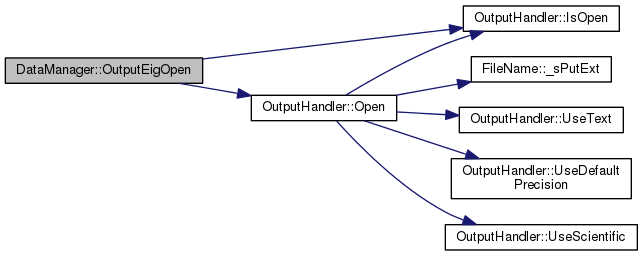
| void DataManager::OutputEigOpen | ( | const std::string & | postfix | ) |
Definition at line 685 of file dataman.cc.
References ASSERT, OutputHandler::EIGENANALYSIS, OutputHandler::IsOpen(), OutputHandler::Open(), and OutHdl.
Referenced by Solver::Eig().
| void DataManager::OutputEigParams | ( | const doublereal & | dTime, |
| const doublereal & | dCoef, | ||
| const unsigned | uCurrEigSol, | ||
| const int | iResultsPrecision | ||
| ) |
Definition at line 1525 of file dataman2.cc.
References OutputHandler::EIGENANALYSIS, OutputHandler::Eigenanalysis(), OutputHandler::GetCurrentStep(), OutputHandler::NETCDF, OutHdl, OutputHandler::UseNetCDF(), and OutputHandler::UseText().
Referenced by Solver::Eig().
Definition at line 1474 of file dataman2.cc.
References OutputHandler::NETCDF, DataManager::NodeDataStructure::NodeContainer, NodeData, OutHdl, Node::STRUCTURAL, and OutputHandler::UseNetCDF().
Referenced by Solver::Prepare().

| void DataManager::OutputEigSparseMatrices | ( | const MatrixHandler * | pmMatA, |
| const MatrixHandler * | pmMatB, | ||
| const unsigned | uCurrEigSol, | ||
| const int | iMatrixPrecision | ||
| ) |
Definition at line 1651 of file dataman2.cc.
References SpMapMatrixHandler::begin(), OutputHandler::EIGENANALYSIS, OutputHandler::Eigenanalysis(), SpMapMatrixHandler::end(), OutputHandler::NETCDF, SparseMatrixHandler::Nz(), OutHdl, Vec3::pGetVec(), OutputHandler::UseNetCDF(), and OutputHandler::UseText().
Referenced by Solver::Eig().
| void DataManager::OutputOpen | ( | const OutputHandler::OutFiles | out | ) |
Definition at line 677 of file dataman.cc.
References OutputHandler::IsOpen(), OutputHandler::Open(), and OutHdl.
Referenced by ReadElems(), and ReadModal().
|
virtual |
Definition at line 1451 of file dataman2.cc.
References ASSERT, ElemOutputPrepare(), OutputHandler::IsOpen(), OutputHandler::NETCDF, NodeOutputPrepare(), OutputHandler::Open(), OutHdl, and OutputHandler::UseNetCDF().
Referenced by InverseSolver::Prepare(), and Solver::Prepare().
Definition at line 674 of file elman.cc.
References AIRPROPOWNER, ASSERT, DOFOWNER, ELEM, GRAVITYOWNER, and INITIALASSEMBLY.
Referenced by pFindElem().
| Drive * DataManager::pFindDrive | ( | Drive::Type | Typ, |
| unsigned int | uL | ||
| ) | const |
Definition at line 705 of file elman.cc.
References ASSERT, DriveData, iNum, pLabelSearch(), and ppFirstDrive.
Referenced by GetBufIn(), GetBufInRaw(), FileDCR::Read(), and SetBufInRaw().

|
protected |
Definition at line 650 of file elman.cc.
References ASSERT, ELEM, ElemData, DataManager::ElemDataStructure::ElemMapToList, and pChooseElem().
Referenced by ExtForceEDGE::ExtForceEDGE(), model_elem(), pFindElem(), ElementDCR::Read(), ReadAerodynamicBeam(), ReadAerodynamicBeam2(), ReadElem(), ReadElems(), ReadGenel(), ReadInducedVelocity(), ReadJointRegularization(), ReadOneElem(), and ElemPrivPlugIn::ReadSE().

| Elem * DataManager::pFindElem | ( | Elem::Type | Typ, |
| unsigned int | uElem = unsigned(-1) |
||
| ) | const |
Definition at line 609 of file elman.cc.
References ElemData, and DataManager::ElemDataStructure::ElemMapToList.
| Tbase * DataManager::pFindElem | ( | unsigned int | uElem = unsigned(-1) | ) | const |
Definition at line 953 of file dataman.h.
References WithLabel::GetLabel(), pFindElem(), and psElemNames.

| Tder * DataManager::pFindElem | ( | unsigned int | uElem = unsigned(-1) | ) | const |
Definition at line 974 of file dataman.h.
References psElemNames.
| Node * DataManager::pFindNode | ( | Node::Type | Typ, |
| unsigned int | uNode | ||
| ) | const |
Definition at line 179 of file nodeman.cc.
References NodeData, and DataManager::NodeDataStructure::NodeMapToList.
Referenced by model_node(), pFindNode(), NodeDCR::Read(), ReadModal(), DofPlugIn::ReadNode(), ReadNode(), ReadNodes(), ReadScalarAlgebraicNode(), ReadScalarDof(), and NodePrivPlugIn::ReadSE().
| Tbase * DataManager::pFindNode | ( | unsigned int | uNode | ) | const |
Definition at line 912 of file dataman.h.
References WithLabel::GetLabel(), pFindNode(), and psNodeNames.
| Tder * DataManager::pFindNode | ( | unsigned int | uNode | ) | const |
Definition at line 933 of file dataman.h.
References psNodeNames.
|
inline |
Definition at line 340 of file dataman.h.
References DrvHdl.
Referenced by AeroDynModule::AeroDynModule(), ModuleNonsmoothNode::AssRes(), ModuleNonsmoothNode::ModuleNonsmoothNode(), InverseSolver::Prepare(), Solver::Prepare(), VariableStepDR::Read(), FixedStepDR::Read(), MultiStepDriveDCR::Read(), SwitchDriveDCR::Read(), GiNaCDCR::Read(), NodeDistDCR::Read(), Gust1DGR::Read(), JoystickDR::Read(), GRAALLDamperCLR::Read(), ScalarFunctionDCR::Read(), TimeDCR::Read(), TimeStepDCR::Read(), MultDCR::Read(), LinearDCR::Read(), ParabolicDCR::Read(), CubicDCR::Read(), StepDCR::Read(), DoubleStepDCR::Read(), RampDCR::Read(), DoubleRampDCR::Read(), SineCosineDCR::Read(), TanhDCR::Read(), FourierSeriesDCR::Read(), FrequencySweepDCR::Read(), ExponentialDCR::Read(), RandomDCR::Read(), MeterDCR::Read(), ClosestNextDCR::Read(), DirectDCR::Read(), PiecewiseLinearDCR::Read(), StringDCR::Read(), DofDCR::Read(), SimulationEntityDCR::Read(), DriveDCR::Read(), SHDCR::Read(), ArrayDCR::Read(), FileDCR::Read(), PeriodicDCR::Read(), ReadAeroData(), ReadBufferStreamDrive(), ReadC81MultipleAeroData(), ReadRTMBDynInDrive(), ReadStreamDriveEcho(), MBDynParser::SetDataManager(), and Wheel4::Wheel4().
|
inline |
|
inline |
Definition at line 485 of file dataman.h.
References pRBK.
Referenced by ReadAirProperties(), and ReadStructNode().
| bool DataManager::PopCurrData | ( | const std::string & | name | ) |
Definition at line 941 of file dataman.cc.
References MathParser::GetNameSpace(), MathPar, and ModelNameSpace::PopCurrData().
Referenced by ReadJoint().

|
protected |
Definition at line 629 of file elman.cc.
References ASSERT, ElemData, and DataManager::ElemDataStructure::ElemMapToList.
Referenced by ReadElems().
| Node** DataManager::ppFindNode | ( | Node::Type | Typ, |
| unsigned int | uNode | ||
| ) | const |
|
virtual |
Definition at line 2603 of file dataman2.cc.
References DriveHandler::dGetTime(), DriveHandler::dGetTimeStep(), Dofs, DrvHdl, VectorHandler::iGetSize(), DriveHandler::iGetStep(), and iSize.
Referenced by AssRes(), InitialJointAssembly(), and Solver::PrintResidual().
|
virtual |
Definition at line 2619 of file dataman2.cc.
References DriveHandler::dGetTime(), DriveHandler::dGetTimeStep(), Dofs, DrvHdl, VectorHandler::iGetSize(), DriveHandler::iGetStep(), and iSize.
Referenced by InitialJointAssembly(), and Solver::PrintSolution().
| bool DataManager::PushCurrData | ( | const std::string & | name, |
| const TypedValue & | value | ||
| ) |
Definition at line 930 of file dataman.cc.
References MathParser::GetNameSpace(), MathPar, and ModelNameSpace::PushCurrData().
Referenced by ReadJoint().

|
protected |
Definition at line 68 of file dataman3.cc.
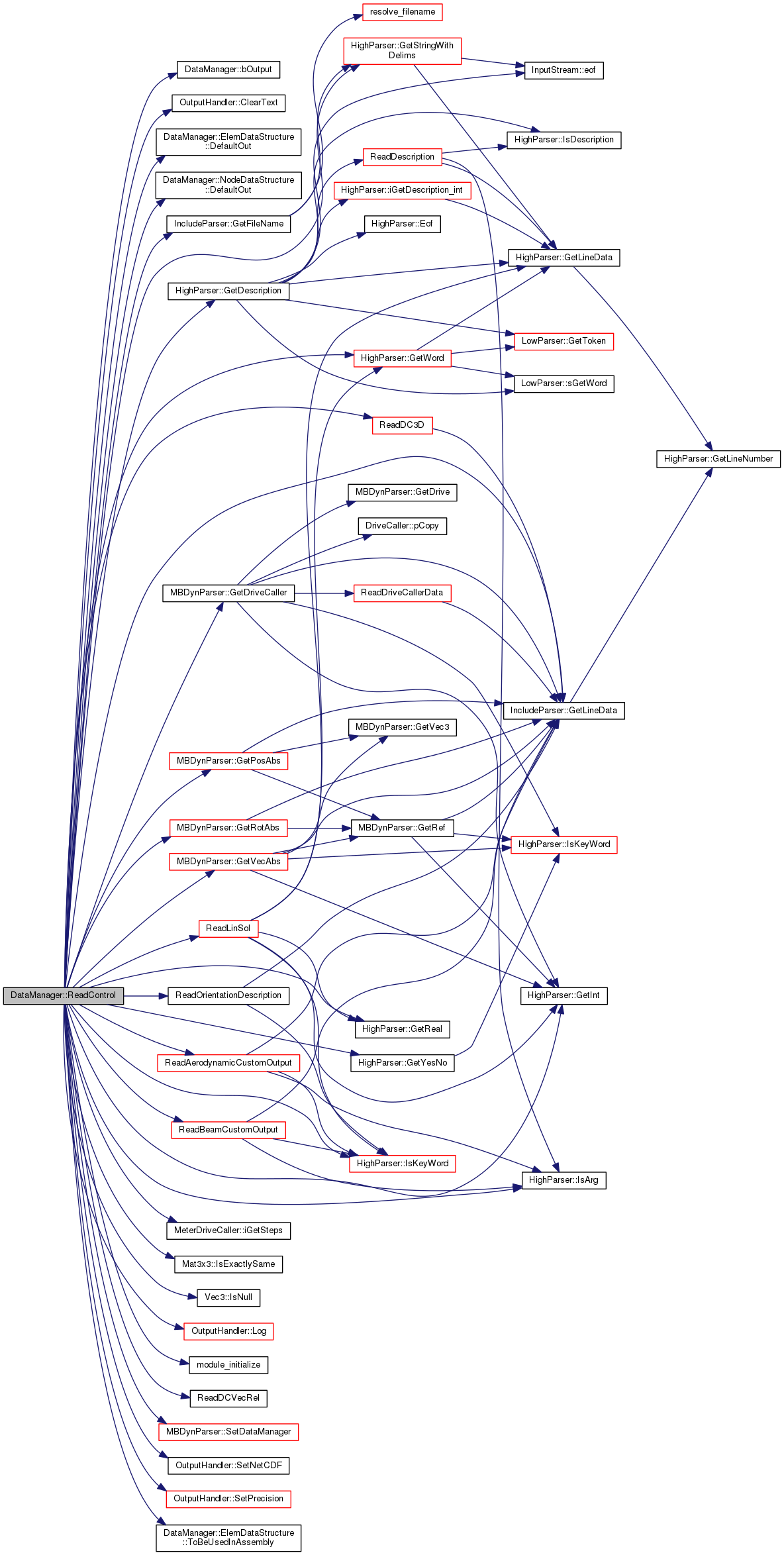
References AbsRefFrame, Node::ABSTRACT, DofOwner::ABSTRACTNODE, OutputHandler::AERODYNAMIC, DofOwner::AERODYNAMIC, Elem::AERODYNAMIC, DofOwner::AEROMODAL, Elem::AEROMODAL, Elem::AIRPROPERTIES, AIRPROPERTIES, ASSERT, ATEND, Elem::AUTOMATICSTRUCTURAL, AUTOMATICSTRUCTURAL, Elem::BEAM, OutputHandler::BEAMS, bInitialJointAssemblyToBeDone, Elem::BODY, bOmegaRotates, bOutput(), bOutputAccels, bOutputDriveCaller, bOutputFrames, bSkipInitialJointAssembly, bStaticModel, Elem::BULK, OutputHandler::ClearText(), CurrSolver, dDefaultInitialAssemblyTol, dDefaultInitialStiffness, DEBUGCERR, DEBUGCOUTFNAME, DEBUGLCOUT, DataManager::ElemDataStructure::DefaultOut(), DataManager::NodeDataStructure::DefaultOut(), dEpsilon, dInitialAssemblyTol, dInitialPositionStiffness, dInitialVelocityStiffness, DofData, dRestartTime, DriveData, DrvHdl, Node::ELECTRIC, DofOwner::ELECTRIC, Elem::ELECTRIC, DofOwner::ELECTRICBULK, Elem::ELECTRICBULK, DofOwner::ELECTRICNODE, ElemData, END, Elem::EXTERNAL, Eye3, Drive::FILEDRIVE, Elem::FORCE, OutputHandler::FORCES, DofOwner::GENEL, Elem::GENEL, HighParser::GetDescription(), MBDynParser::GetDriveCaller(), IncludeParser::GetFileName(), HighParser::GetInt(), IncludeParser::GetLineData(), MBDynParser::GetPosAbs(), HighParser::GetReal(), MBDynParser::GetRotAbs(), HighParser::GetStringWithDelims(), MBDynParser::GetVecAbs(), HighParser::GetWord(), HighParser::GetYesNo(), GRAVITY, Elem::GRAVITY, Node::HYDRAULIC, DofOwner::HYDRAULIC, Elem::HYDRAULIC, DofOwner::HYDRAULICNODE, iDefaultMaxInitialIterations, DataManager::ElemDataStructure::iExpectedNum, DataManager::NodeDataStructure::iExpectedNum, MeterDriveCaller::iGetSteps(), iMaxInitialIterations, DofOwner::INDUCEDVELOCITY, Elem::INDUCEDVELOCITY, OutputHandler::INERTIA, Elem::INERTIA, INERTIA, iNumRestartTimes, iRestartIterations, HighParser::IsArg(), Mat3x3::IsExactlySame(), HighParser::IsKeyWord(), Vec3::IsNull(), ITERATIONS, DofOwner::JOINT, Elem::JOINT, Elem::JOINT_REGULARIZATION, OutputHandler::JOINTS, DofOwner::LASTDOFTYPE, Elem::LASTELEMTYPE, LASTKEYWORD, Node::LASTNODETYPE, OutputHandler::LOADABLE, DofOwner::LOADABLE, Elem::LOADABLE, OutputHandler::Log(), MBDYN_EXCEPT_ARGS, module_initialize(), MYDEBUG_INPUT, OutputHandler::NETCDF, NodeData, NONE, od, OutHdl, Node::PARAMETER, pdRestartTimes, DofOwner::PLATE, Elem::PLATE, pOutputMeter, pRBK, PRINT_CONNECTION, PRINT_DESCRIPTION, PRINT_DOF_DESCRIPTION, PRINT_DOF_STATS, PRINT_EL_CONNECTION, PRINT_EQ_DESCRIPTION, PRINT_NODE_CONNECTION, PRINT_NONE, PRINT_TO_FILE, psReadControlDrivers, psReadControlElems, psReadControlNodes, R, ReadAerodynamicCustomOutput(), ReadBeamCustomOutput(), ReadDC3D(), ReadDCVecRel(), ReadLinSol(), ReadOrientationDescription(), RES_NETCDF, ResMode, RestartEvery, SAFEDELETE, SAFEDELETEARR, SAFENEW, SAFENEWARR, SAFENEWWITHCONSTRUCTOR, SAFESTRDUP, saveXSol, MBDynParser::SetDataManager(), OutputHandler::SetNetCDF(), OutputHandler::SetPrecision(), Elem::SOCKETSTREAM_OUTPUT, solArrFileName, sSimulationTitle, OutputHandler::STRNODES, Node::STRUCTURAL, DofOwner::STRUCTURALNODE, Node::THERMAL, DofOwner::THERMAL, Elem::THERMAL, DofOwner::THERMALNODE, TIME, timeout, TIMES, DataManager::ElemDataStructure::ToBeUsedInAssembly(), uPrintFlags, Beam::VISCOELASTIC, and Zero3.
Referenced by DataManager().
|
protected |
Definition at line 2187 of file dataman3.cc.
References DEBUGCERR, DEBUGCOUTFNAME, DEBUGLCOUT, DriveData, END, Drive::FILEDRIVE, HighParser::GetDescription(), HighParser::GetInt(), IncludeParser::GetLineData(), HighParser::GetWord(), iNumTypes, HighParser::IsArg(), iTotDrive, Drive::LASTDRIVETYPE, LASTKEYWORD, MBDYN_EXCEPT_ARGS, MYDEBUG_INPUT, psDriveNames, and ReadDriveData().
Referenced by DataManager().

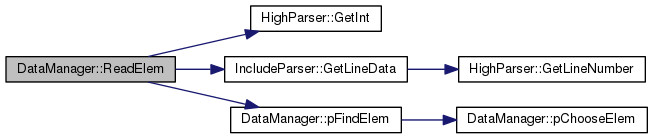
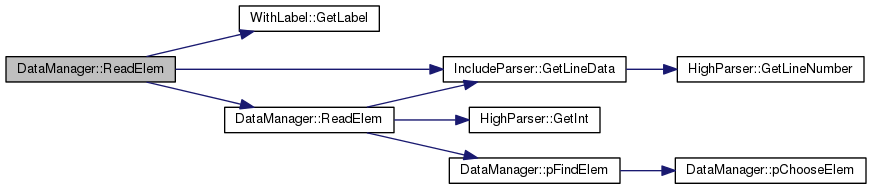
| Elem * DataManager::ReadElem | ( | MBDynParser & | HP, |
| Elem::Type | type | ||
| ) | const |
Definition at line 2334 of file dataman3.cc.
References DEBUGLCOUT, HighParser::GetInt(), IncludeParser::GetLineData(), MBDYN_EXCEPT_ARGS, MYDEBUG_INPUT, pFindElem(), psElemNames, and psNodeNames.
Referenced by LoadIncForce::LoadIncForce(), ReadAerodynamicModal(), ReadElem(), ReadGenel(), ReadModalExtForce(), ReadModalForce(), and Wheel4::Wheel4().
| Tbase * DataManager::ReadElem | ( | MBDynParser & | HP | ) | const |
Definition at line 1029 of file dataman.h.
References ASSERT, WithLabel::GetLabel(), IncludeParser::GetLineData(), MBDYN_EXCEPT_ARGS, psElemNames, and ReadElem().
| Tder * DataManager::ReadElem | ( | MBDynParser & | HP | ) | const |
Definition at line 1046 of file dataman.h.
References ASSERT, IncludeParser::GetLineData(), MBDYN_EXCEPT_ARGS, and psElemNames.

|
protected |
Definition at line 157 of file dataman4.cc.
References AbsRefFrame, Elem::AERODYNAMIC, AERODYNAMICBEAM, AERODYNAMICBEAM2, AERODYNAMICBEAM3, AERODYNAMICBODY, AERODYNAMICEXTERNAL, AERODYNAMICEXTERNALMODAL, AEROMODAL, Elem::AEROMODAL, AIRCRAFTINSTRUMENTS, Elem::AIRPROPERTIES, AIRPROPERTIES, ASSERT, Elem::AUTOMATICSTRUCTURAL, AUTOMATICSTRUCTURAL, Elem::BEAM, BEAM, BEAM2, BEAM3, Elem2Param::Bind(), BIND, BODY, Elem::BODY, Elem::BULK, BULK, COUPLE, DEBUGCERR, DEBUGCOUT, DEBUGCOUTFNAME, DEBUGLCOUT, HighParser::DEFAULTDELIM, DRIVEN, StructDispNode::DYNAMIC, StructNode::DYNAMIC, Elem::ELECTRIC, ELECTRIC, DataManager::ElemDataStructure::ElemContainer, ElemData, ELEMENTS, Elems, END, EXISTING, HighParser::ExpectDescription(), Elem::EXTERNAL, Elem::FORCE, FORCE, fReadOutput(), Elem::GENEL, GENEL, GENERICAERODYNAMICFORCE, HighParser::GetDescription(), MBDynParser::GetDriveCaller(), Elem::GetElemType(), HighParser::GetInt(), WithLabel::GetLabel(), IncludeParser::GetLineData(), WithLabel::GetName(), HighParser::GetStringWithDelims(), DynamicStructDispNode::GetStructDispNodeType(), DynamicStructNode::GetStructNodeType(), MBDynParser::GetVecAbs(), HighParser::GetWord(), GRAVITY, Elem::GRAVITY, GUST, HBEAM, Elem::HYDRAULIC, HYDRAULIC, DataManager::ElemDataStructure::iExpectedNum, SimulationEntity::iGetNumPrivData(), SimulationEntity::iGetPrivDataIdx(), Elem::INDUCEDVELOCITY, INDUCEDVELOCITY, Elem::INERTIA, INERTIA, AutomaticStructDispElem::Init(), AutomaticStructElem::Init(), InsertElem(), HighParser::IsArg(), HighParser::IsKeyWord(), JOINT, Elem::JOINT, JOINT_REGULARIZATION, Elem::JOINT_REGULARIZATION, Elem::LASTELEMTYPE, Elem::LOADABLE, LOADABLE, MBDYN_EXCEPT_ARGS, MEMBRANE4EAS, OutputHandler::MODAL, module_initialize(), MYDEBUG_INPUT, NO_OP, DataManager::NodeDataStructure::NodeContainer, NodeData, OUTPUT, OUTPUT_ELEMENT, OutputOpen(), SimulationEntity::ParseHint(), pFindElem(), Elem::PLATE, ppFindElem(), psElemNames, AirPropOwner::PutAirProperties(), GravityOwner::PutGravity(), WithLabel::PutName(), ReadAirProperties(), ReadGravity(), ReadGustData(), ReadOneElem(), ROTOR, RTAI_OUTPUT, SAFENEWWITHCONSTRUCTOR, ToBeOutput::SetOutputFlag(), SHELL4EAS, SHELL4EASANS, SOCKETSTREAM_MOTION_OUTPUT, Elem::SOCKETSTREAM_OUTPUT, SOCKETSTREAM_OUTPUT, Node::STRUCTURAL, Elem::THERMAL, THERMAL, Elem::UNKNOWN, UNKNOWNKEYWORD, and USER_DEFINED.
Referenced by DataManager().
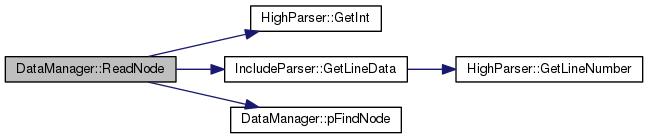
| Node * DataManager::ReadNode | ( | MBDynParser & | HP, |
| Node::Type | type | ||
| ) | const |
Definition at line 2309 of file dataman3.cc.
References DEBUGLCOUT, HighParser::GetInt(), IncludeParser::GetLineData(), MBDYN_EXCEPT_ARGS, MYDEBUG_INPUT, pFindNode(), and psNodeNames.
Referenced by AeroDynModule::AeroDynModule(), asynchronous_machine::asynchronous_machine(), HydrodynamicPlainBearing::HydrodynamicPlainBearing(), InlineFriction::InlineFriction(), LoadIncForce::LoadIncForce(), ModuleIMU::ModuleIMU(), ModuleIMUConstraint::ModuleIMUConstraint(), ModuleNonsmoothNode::ModuleNonsmoothNode(), NodeDistDCR::Read(), MotionContentTypeReader::Read(), ReadAerodynamicBody(), ReadAircraftInstruments(), ReadBeam(), ReadBeam2(), ReadBody(), ReadElectric(), ReadForce(), ReadGenel(), ReadGenericAerodynamicForce(), ReadHBeam(), ReadHydraulicElem(), ReadJoint(), ReadMembrane4EAS(), ReadModalExtForce(), ReadModalMappingExtForce(), ReadNode(), ReadResSet(), ReadRotor(), ReadRotorData(), ReadShell4EAS(), ReadShell4EASANS(), ReadStructExtForce(), ReadStructMappingExtForce(), ReadStructNode(), ReadStructuralForce(), ReadThermal(), Wheel2::Wheel2(), and Wheel4::Wheel4().
| Tbase * DataManager::ReadNode | ( | MBDynParser & | HP | ) | const |
Definition at line 994 of file dataman.h.
References ASSERT, WithLabel::GetLabel(), IncludeParser::GetLineData(), MBDYN_EXCEPT_ARGS, psNodeNames, and ReadNode().
| Tder * DataManager::ReadNode | ( | MBDynParser & | HP | ) | const |
Definition at line 1011 of file dataman.h.
References ASSERT, IncludeParser::GetLineData(), MBDYN_EXCEPT_ARGS, and psNodeNames.

|
protected |
Definition at line 1557 of file dataman3.cc.
References Node::ABSTRACT, DofOwner::ABSTRACTNODE, ASSERT, DEBUGCERR, DEBUGCOUTFNAME, DEBUGLCOUT, DofData, dReadScale(), DrvHdl, DummyDofOwner, Node::ELECTRIC, ELECTRIC, DofOwner::ELECTRICNODE, END, fReadOutput(), HighParser::GetDescription(), HighParser::GetInt(), IncludeParser::GetLineData(), HighParser::GetReal(), HighParser::GetStringWithDelims(), HighParser::GetWord(), Node::HYDRAULIC, HYDRAULIC, DofOwner::HYDRAULICNODE, DataManager::NodeDataStructure::iExpectedNum, InsertNode(), iNumTypes, HighParser::IsArg(), HighParser::IsKeyWord(), iTotNodes, LASTKEYWORD, Node::LASTNODETYPE, MBDYN_EXCEPT_ARGS, MYDEBUG_INPUT, DataManager::NodeDataStructure::NodeContainer, NodeData, Nodes, OUTPUT, Node::PARAMETER, pFindNode(), ScalarDof::pNode, psNodeNames, psReadNodesNodes, ReadScalarAlgebraicNode(), ReadScalarDifferentialNode(), ReadScalarDof(), ReadStructNode(), SAFENEWWITHCONSTRUCTOR, ToBeOutput::SetOutputFlag(), DofOwner::SetScale(), Node::STRUCTURAL, DofOwner::STRUCTURALNODE, Node::THERMAL, THERMAL, and DofOwner::THERMALNODE.
Referenced by DataManager().
|
protected |
Definition at line 1255 of file dataman4.cc.
References AbsRefFrame, DofOwner::AERODYNAMIC, Elem::AERODYNAMIC, AERODYNAMICBEAM, AERODYNAMICBEAM2, AERODYNAMICBEAM3, AERODYNAMICBODY, AERODYNAMICEXTERNAL, AERODYNAMICEXTERNALMODAL, DofOwner::AEROMODAL, AEROMODAL, Elem::AEROMODAL, AIRCRAFTINSTRUMENTS, ASSERTMSG, Elem::BEAM, BEAM, BEAM2, BEAM3, BODY, Elem::BODY, Elem::BULK, BULK, COUPLE, DEBUGCERR, DofData, DofOwner::ELECTRIC, Elem::ELECTRIC, ELECTRIC, DataManager::ElemDataStructure::ElemContainer, ElemData, Elem::EXTERNAL, Eye3, Elem::FORCE, FORCE, fReadOutput(), DofOwner::GENEL, Elem::GENEL, GENEL, GENERICAERODYNAMICFORCE, HighParser::GetInt(), WithLabel::GetLabel(), IncludeParser::GetLineData(), MBDynParser::GetPosAbs(), MBDynParser::GetRotAbs(), HBEAM, DofOwner::HYDRAULIC, Elem::HYDRAULIC, HYDRAULIC, DataManager::ElemDataStructure::iExpectedNum, DofOwner::INDUCEDVELOCITY, Elem::INDUCEDVELOCITY, INDUCEDVELOCITY, Elem::INERTIA, INERTIA, InsertElem(), HighParser::IsArg(), HighParser::IsKeyWord(), DofOwner::JOINT, JOINT, Elem::JOINT, JOINT_REGULARIZATION, Elem::JOINT_REGULARIZATION, DofOwner::LOADABLE, Elem::LOADABLE, LOADABLE, OutputHandler::Log(), MBDYN_EXCEPT_ARGS, MEMBRANE4EAS, StreamContent::MOTION, OutHdl, Inertia::OUTPUT_ALWAYS, OUTPUT_ELEMENT, Inertia::OUTPUT_LOG, Inertia::OUTPUT_OUT, ParseUserDefinedElem(), pFindElem(), DofOwner::PLATE, Elem::PLATE, psElemNames, R, ReadAerodynamicBeam(), ReadAerodynamicBeam2(), ReadAerodynamicBody(), ReadAerodynamicModal(), ReadAircraftInstruments(), ReadBeam(), ReadBeam2(), ReadBody(), ReadBulk(), ReadElectric(), ReadForce(), ReadGenel(), ReadGenericAerodynamicForce(), ReadHBeam(), ReadHydraulicElem(), ReadJoint(), ReadJointRegularization(), ReadLoadable(), ReadMembrane4EAS(), ReadOutputElem(), ReadRotor(), ReadShell4EAS(), ReadShell4EASANS(), ReadThermal(), ROTOR, RTAI_OUTPUT, SAFEDELETE, SAFENEWWITHCONSTRUCTOR, SHELL4EAS, SHELL4EASANS, StreamOutElem::SOCKETSTREAM, SOCKETSTREAM_MOTION_OUTPUT, Elem::SOCKETSTREAM_OUTPUT, SOCKETSTREAM_OUTPUT, DofOwner::THERMAL, Elem::THERMAL, THERMAL, Mat3x3::Transpose(), StreamOutElem::UNDEFINED, StreamContent::UNKNOWN, Elem::UNKNOWN, USER_DEFINED, StreamContent::VALUES, and Zero3.
Referenced by ReadElems().
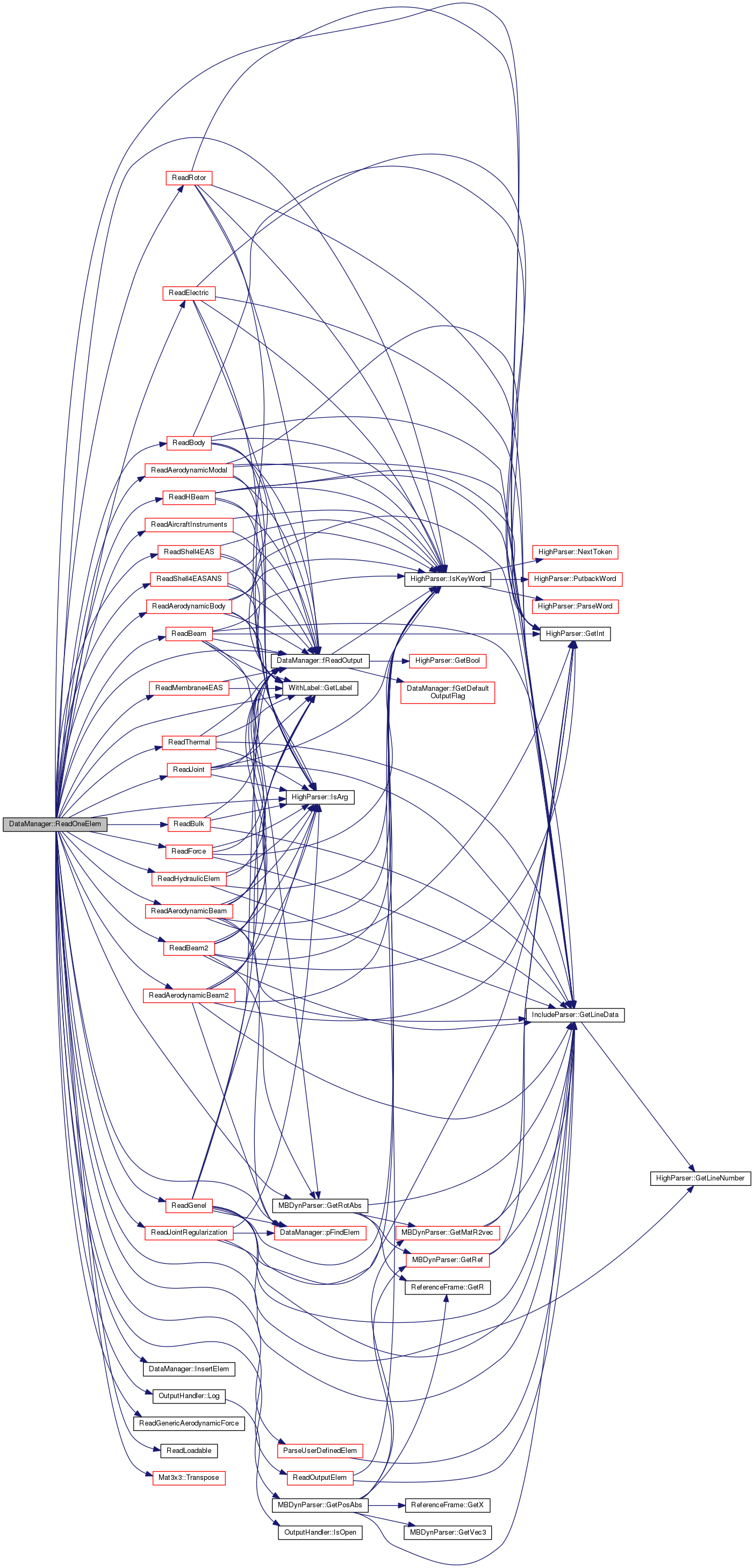
| int DataManager::ReadScalarAlgebraicNode | ( | MBDynParser & | HP, |
| unsigned int | uLabel, | ||
| Node::Type | type, | ||
| doublereal & | dX | ||
| ) | const |
Definition at line 1510 of file dataman3.cc.
References DEBUGLCOUT, IncludeParser::GetLineData(), HighParser::GetReal(), HighParser::IsArg(), HighParser::IsKeyWord(), MBDYN_EXCEPT_ARGS, MYDEBUG_INPUT, pFindNode(), and psNodeNames.
Referenced by ReadNodes(), and ReadScalarDifferentialNode().
| int DataManager::ReadScalarDifferentialNode | ( | MBDynParser & | HP, |
| unsigned int | uLabel, | ||
| Node::Type | type, | ||
| doublereal & | dX, | ||
| doublereal & | dXP | ||
| ) | const |
Definition at line 1539 of file dataman3.cc.
References DEBUGLCOUT, HighParser::GetReal(), HighParser::IsKeyWord(), MYDEBUG_INPUT, and ReadScalarAlgebraicNode().
Referenced by ReadNodes().

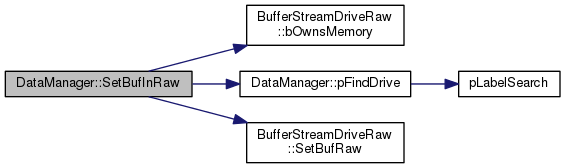
| void DataManager::SetBufInRaw | ( | unsigned | uL, |
| integer | n, | ||
| const doublereal * | p | ||
| ) |
Definition at line 2769 of file dataman2.cc.
References BufferStreamDriveRaw::bOwnsMemory(), Drive::FILEDRIVE, MBDYN_EXCEPT_ARGS, pFindDrive(), and BufferStreamDriveRaw::SetBufRaw().
Referenced by mb_sol_setbufin().
| void DataManager::SetBufOutRaw | ( | unsigned | uL, |
| integer | n, | ||
| const doublereal * | p | ||
| ) |
Definition at line 2804 of file dataman2.cc.
References BufferStreamElemRaw::bOwnsMemory(), MBDYN_EXCEPT_ARGS, and BufferStreamElemRaw::SetBufRaw().
Referenced by mb_sol_setbufout().

| void DataManager::SetLoadableElemModule | ( | std::string | name, |
| const LoadableCalls * | calls, | ||
| ModuleInsertMode | mode = MIM_FAIL |
||
| ) |
Definition at line 73 of file dataman2.cc.
References calls, GetLoadableElemModule(), MapOfLoadableElemHandlers, MBDYN_EXCEPT_ARGS, MIM_FAIL, MIM_IGNORE, and MIM_REPLACE.

| void DataManager::SetOrientationDescription | ( | OrientationDescription | od | ) |
Definition at line 851 of file dataman.cc.
References od.
| void DataManager::SetOutput | ( | Elem::Type | t, |
| unsigned | flags, | ||
| OrientationDescription | od | ||
| ) |
Definition at line 864 of file dataman.cc.
References ElemData, od, DataManager::ElemDataStructure::od, and DataManager::ElemDataStructure::uOutputFlags.
| void DataManager::SetScale | ( | VectorHandler & | XScale | ) | const |
Definition at line 159 of file dofman.cc.
References DofOwners, iTotDofOwners, and VectorHandler::PutCoef().
Referenced by InverseSolver::Prepare(), and Solver::Prepare().

| void DataManager::SetTime | ( | const doublereal & | dTime, |
| const doublereal & | dTimeStep = -1., |
||
| const integer & | iStep = -1, |
||
| bool | bServePending = true |
||
| ) |
Definition at line 139 of file dataman2.cc.
References DEBUGLCOUT, DriveData, DrvHdl, MathParser::GetSymbolTable(), Drive::LASTDRIVETYPE, MathPar, MYDEBUG_ASSEMBLY, MYDEBUG_INIT, pRBK, DriveHandler::SetTime(), and RigidBodyKinematics::Update().
Referenced by InverseSolver::Advance(), Solver::Advance(), DataManager(), ThirdOrderIntegrator::Jacobian(), InverseSolver::Prepare(), Solver::Prepare(), ThirdOrderIntegrator::Residual(), and Solver::Start().

| void DataManager::SetValue | ( | VectorHandler & | X, |
| VectorHandler & | XP | ||
| ) |
Definition at line 1404 of file dataman2.cc.
References VecIter< T >::bGetFirst(), VecIter< T >::bGetNext(), ElemIter, VectorHandler::iGetSize(), MBDYN_EXCEPT_ARGS, Nodes, VectorHandler::pdGetVec(), SAFEDELETEARR, SimulationEntity::SetValue(), and solArrFileName.
Referenced by InverseSolver::Prepare(), and Solver::Prepare().
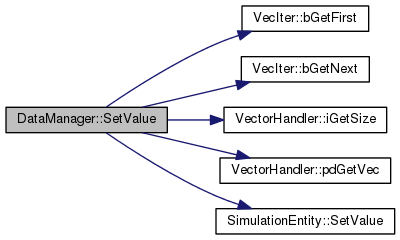
|
virtual |
Reimplemented in SchurDataManager.
Definition at line 2511 of file dataman2.cc.
References VecIter< T >::bGetFirst(), VecIter< T >::bGetNext(), ElemIter, Nodes, pXCurr, pXPrimeCurr, and SimulationEntity::Update().
Referenced by ImplicitStepIntegrator::EvalProd(), InverseDynamicsStepSolver::EvalProd(), ThirdOrderIntegrator::Jacobian(), ThirdOrderIntegrator::Residual(), ThirdOrderIntegrator::Update(), StepNIntegrator::Update(), and InverseDynamicsStepSolver::Update().
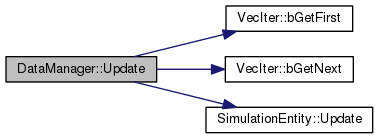
|
virtual |
Definition at line 793 of file invdataman.cc.
References InverseDynamics::ACCELERATION, ASSERT, DataManager::ElemDataStructure::ElemContainer, ElemData, InverseDynamics::INVERSE_DYNAMICS, Elem::JOINT, MBDYN_EXCEPT_ARGS, Nodes, pLambdaCurr, InverseDynamics::POSITION, pXCurr, pXPrimeCurr, pXPrimePrimeCurr, and InverseDynamics::VELOCITY.
|
friend |
|
protected |
Definition at line 116 of file dataman.h.
Referenced by DataManager(), and ReadControl().
|
protected |
Definition at line 133 of file dataman.h.
Referenced by bIsInverseDynamics(), bSetInverseDynamics(), and DataManager().
|
protected |
Definition at line 123 of file dataman.h.
Referenced by bDoesOmegaRotate(), and ReadControl().
|
protected |
Definition at line 119 of file dataman.h.
Referenced by bOutputAccelerations(), IDDofInit(), and ReadControl().
|
protected |
Definition at line 120 of file dataman.h.
Referenced by bOutputDriveCallers(), and ReadControl().
|
protected |
Definition at line 118 of file dataman.h.
Referenced by DataManager(), and ReadControl().
|
protected |
Definition at line 117 of file dataman.h.
Referenced by DataManager(), and ReadControl().
|
protected |
Definition at line 130 of file dataman.h.
Referenced by bIsStaticModel(), bSetStaticModel(), and ReadControl().
|
protected |
Definition at line 127 of file dataman.h.
Referenced by InitialJointAssembly(), and ReadControl().
| doublereal DataManager::dDefScale |
|
protected |
Definition at line 126 of file dataman.h.
Referenced by InitialJointAssembly(), and ReadControl().
|
protected |
Definition at line 124 of file dataman.h.
Referenced by InitialJointAssembly(), MakeRestart(), and ReadControl().
|
protected |
Definition at line 121 of file dataman.h.
Referenced by dGetInitialPositionStiffness(), MakeRestart(), and ReadControl().
|
protected |
Definition at line 122 of file dataman.h.
Referenced by dGetInitialVelocityStiffness(), MakeRestart(), and ReadControl().
|
mutableprotected |
Definition at line 173 of file dataman.h.
Referenced by AfterConvergence().
| struct { ... } DataManager::DofData[DofOwner::LASTDOFTYPE] |
Referenced by DataManager(), dGetDefaultScale(), DofDataInit(), DofManager(), IDDofInit(), InitialJointAssembly(), ReadControl(), ReadNodes(), and ReadOneElem().
|
protected |
Definition at line 796 of file dataman.h.
Referenced by DataManager(), DofDataInit(), DofInit(), IDDofInit(), and SetScale().
|
protected |
Definition at line 813 of file dataman.h.
Referenced by DataManager(), DofInit(), DofOwnerInit(), GetDofDescription(), GetDofs(), GetDofType(), GetEqDescription(), GetEqType(), IDDofInit(), InitialJointAssembly(), PrintResidual(), and PrintSolution().
|
protected |
Definition at line 166 of file dataman.h.
Referenced by AfterConvergence(), and ReadControl().
| struct { ... } DataManager::DriveData[Drive::LASTDRIVETYPE] |
Referenced by DataManager(), ElemDataInit(), ElemManager(), MakeRestart(), pFindDrive(), ReadControl(), ReadDrivers(), and SetTime().
|
protected |
Definition at line 104 of file dataman.h.
Referenced by AfterConvergence(), AssConstrJac(), AssConstrRes(), dGetTime(), LinkToSolution(), pGetDrvHdl(), PrintResidual(), PrintSolution(), ReadControl(), ReadNodes(), and SetTime().
|
protected |
Definition at line 815 of file dataman.h.
Referenced by DofManager(), and ReadNodes().
|
protected |
Referenced by AssConstrJac(), AssConstrRes(), AssRes(), begin(), DataManager(), DofOwnerSet(), ElemDataInit(), ElemManager(), ElemOutputPrepare(), end(), fGetDefaultOutputFlag(), GetElemDataStructure(), GetOutput(), IDDofInit(), IDDofOwnerSet(), IDSetTest(), IncElemCount(), InitialJointAssembly(), MakeRestart(), pFindElem(), ppFindElem(), ReadControl(), ReadElems(), ReadOneElem(), SetOutput(), and Update().
Definition at line 612 of file dataman.h.
Referenced by AfterConvergence(), AfterPredict(), AssConstrJac(), AssConstrRes(), AssJac(), AssMats(), AssRes(), BeforePredict(), DerivativesUpdate(), DofOwnerInit(), ElemAssInit(), ElemDataInit(), ElemOutput(), ElemOutputPrepare(), IDAfterConvergence(), SetValue(), and Update().
|
protected |
Definition at line 609 of file dataman.h.
Referenced by AssConstrJac(), AssJac(), AssMats(), DataManager(), ElemDataInit(), ElemManagerDestructor(), MakeRestart(), and ReadElems().
|
mutableprotected |
Definition at line 172 of file dataman.h.
Referenced by AfterConvergence().
|
mutableprotected |
Definition at line 170 of file dataman.h.
Referenced by AfterConvergence().
|
protected |
Definition at line 135 of file dataman.h.
Referenced by IDDofInit(), IDDofOwnerSet(), iIDGetJointTotNumDofs(), and iIDGetTotNumDofs().
|
protected |
Definition at line 134 of file dataman.h.
Referenced by IDDofInit(), IDDofOwnerSet(), iIDGetNodeTotNumDofs(), and iIDGetTotNumDofs().
|
protected |
Definition at line 125 of file dataman.h.
Referenced by InitialJointAssembly(), MakeRestart(), and ReadControl().
|
protected |
Definition at line 627 of file dataman.h.
Referenced by ElemAssInit().
|
protected |
Definition at line 628 of file dataman.h.
Referenced by ElemAssInit().
|
protected |
Definition at line 626 of file dataman.h.
Referenced by ElemAssInit().
|
protected |
Definition at line 625 of file dataman.h.
Referenced by ElemAssInit().
| unsigned int DataManager::iNum |
Definition at line 618 of file dataman.h.
Referenced by InitialJointAssembly(), MakeRestart(), and pFindDrive().
|
protected |
Definition at line 169 of file dataman.h.
Referenced by AfterConvergence(), and ReadControl().
|
protected |
Definition at line 165 of file dataman.h.
Referenced by AfterConvergence(), and ReadControl().
| integer DataManager::iSize |
Definition at line 788 of file dataman.h.
Referenced by OutputEigenvectors(), PrintResidual(), and PrintSolution().
|
protected |
Definition at line 795 of file dataman.h.
Referenced by DofDataInit(), DofInit(), IDDofInit(), and SetScale().
|
protected |
Definition at line 809 of file dataman.h.
Referenced by DataManager(), DofInit(), GetDofDescription(), GetDofType(), GetEqDescription(), GetEqType(), IDDofInit(), and InitialJointAssembly().
|
protected |
Definition at line 622 of file dataman.h.
Referenced by DataManager(), ElemDataInit(), ElemManagerDestructor(), MakeRestart(), and ReadDrivers().
|
protected |
Definition at line 748 of file dataman.h.
Referenced by DataManager(), NodeDataInit(), and ReadNodes().
|
mutableprotected |
Definition at line 399 of file dataman.h.
Referenced by AfterPredict(), ConvergedRegister(), ConvergedSet(), EndOfSimulation(), and IsConverged().
|
protected |
Definition at line 102 of file dataman.h.
Referenced by GetLoadableElemModule(), and SetLoadableElemModule().
|
protected |
Definition at line 98 of file dataman.h.
Referenced by DataManager(), GetMathParser(), InsertSym(), PopCurrData(), PushCurrData(), and SetTime().
|
protected |
Definition at line 97 of file dataman.h.
Referenced by DataManager(), DriveOutput(), DriveTrace(), and GetMBDynParser().
|
protected |
Referenced by AssConstrJac(), AssConstrRes(), begin(), DataManager(), DofOwnerInit(), end(), fGetDefaultOutputFlag(), IDDofInit(), InitialJointAssembly(), MakeRestart(), NodeDataInit(), NodeManager(), NodeOutputPrepare(), OutputEigGeometry(), OutputEigPrepare(), pFindNode(), ReadControl(), ReadElems(), and ReadNodes().
|
protected |
Definition at line 743 of file dataman.h.
Referenced by AfterConvergence(), AfterPredict(), BeforePredict(), DerivativesUpdate(), DofOwnerInit(), DofOwnerSet(), IDAfterConvergence(), IDDofOwnerSet(), IDSetTest(), MakeRestart(), NodeDataInit(), NodeManagerDestructor(), NodeOutput(), NodeOutputPrepare(), ReadNodes(), SetValue(), and Update().
|
protected |
Definition at line 229 of file dataman.h.
Referenced by GetOrientationDescription(), ReadControl(), SetOrientationDescription(), and SetOutput().
|
mutableprotected |
Definition at line 105 of file dataman.h.
Referenced by DataManager(), DofOwnerInit(), GetLogFile(), GetOutFile(), InitialJointAssembly(), MakeRestart(), Output(), OutputEigClose(), OutputEigenvectors(), OutputEigFullMatrices(), OutputEigGeometry(), OutputEigNaiveMatrices(), OutputEigOpen(), OutputEigParams(), OutputEigPrepare(), OutputEigSparseMatrices(), OutputOpen(), OutputPrepare(), pGetOutHdl(), ReadControl(), and ReadOneElem().
|
protected |
Definition at line 168 of file dataman.h.
Referenced by AfterConvergence(), and ReadControl().
|
mutableprotected |
Definition at line 113 of file dataman.h.
Referenced by LinkToSolution(), and Update().
|
protected |
Definition at line 179 of file dataman.h.
Referenced by Output(), ReadControl(), and ~DataManager().
|
protected |
Definition at line 89 of file dataman.h.
Referenced by DataManager(), and ~DataManager().
|
protected |
Definition at line 621 of file dataman.h.
Referenced by ElemDataInit(), ElemManagerDestructor(), and MakeRestart().
| Drive** DataManager::ppFirstDrive |
Definition at line 617 of file dataman.h.
Referenced by pFindDrive().
|
protected |
Definition at line 129 of file dataman.h.
Referenced by pGetRBK(), ReadControl(), SetTime(), and ~DataManager().
|
protected |
Definition at line 99 of file dataman.h.
Referenced by AfterConvergence(), AssConstrJac(), AssConstrRes(), GetSolver(), IDDofInit(), iIDGetTotNumDofs(), and MakeRestart().
|
protected |
Definition at line 632 of file dataman.h.
Referenced by AssConstrJac(), AssJac(), and ElemAssInit().
|
protected |
Definition at line 630 of file dataman.h.
Referenced by AssMats(), ElemAssInit(), and ElemManagerDestructor().
|
protected |
Definition at line 631 of file dataman.h.
Referenced by AssMats(), ElemAssInit(), and ElemManagerDestructor().
|
protected |
Definition at line 633 of file dataman.h.
Referenced by AssConstrRes(), AssRes(), ElemAssInit(), and ElemManagerDestructor().
|
mutableprotected |
Definition at line 108 of file dataman.h.
Referenced by AfterConvergence(), AfterPredict(), AssConstrJac(), AssConstrRes(), AssJac(), AssMats(), AssRes(), DerivativesUpdate(), GetpXCurr(), IDAfterConvergence(), LinkToSolution(), MakeRestart(), and Update().
|
mutableprotected |
Definition at line 109 of file dataman.h.
Referenced by AfterConvergence(), AfterPredict(), AssConstrRes(), AssJac(), AssMats(), AssRes(), DerivativesUpdate(), GetpXPCurr(), IDAfterConvergence(), LinkToSolution(), MakeRestart(), and Update().
|
mutableprotected |
Definition at line 112 of file dataman.h.
Referenced by AssConstrRes(), AssRes(), IDAfterConvergence(), LinkToSolution(), and Update().
|
protected |
Definition at line 201 of file dataman.h.
Referenced by bOutput(), and ReadControl().
|
protected |
Definition at line 164 of file dataman.h.
Referenced by AfterConvergence(), MakeRestart(), ReadControl(), and ~DataManager().
|
protected |
Definition at line 175 of file dataman.h.
Referenced by MakeRestart(), and ReadControl().
|
protected |
Definition at line 176 of file dataman.h.
Referenced by ReadControl(), and SetValue().
|
protected |
Definition at line 158 of file dataman.h.
Referenced by MakeRestart(), ReadControl(), and ~DataManager().
|
protected |
Definition at line 156 of file dataman.h.
Referenced by DofOwnerInit(), InitialJointAssembly(), and ReadControl().
 1.8.7
1.8.7 
