|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
#include <rbk_impl.h>
Public Member Functions | |
| DriveRigidBodyKinematics (const TplDriveCaller< Vec3 > *pXDrv, const TplDriveCaller< Vec3 > *pThetaDrv, const TplDriveCaller< Vec3 > *pVDrv, const TplDriveCaller< Vec3 > *pWDrv, const TplDriveCaller< Vec3 > *pXPPDrv, const TplDriveCaller< Vec3 > *pWPDrv) | |
| virtual | ~DriveRigidBodyKinematics (void) |
| virtual void | Update (void) |
 Public Member Functions inherited from ConstRigidBodyKinematics Public Member Functions inherited from ConstRigidBodyKinematics | |
| ConstRigidBodyKinematics (void) | |
| ConstRigidBodyKinematics (const Vec3 &X, const Mat3x3 &R, const Vec3 &V, const Vec3 &W, const Vec3 &XPP, const Vec3 &WP) | |
| virtual | ~ConstRigidBodyKinematics (void) |
| virtual const Vec3 & | GetX (void) const |
| virtual const Mat3x3 & | GetR (void) const |
| virtual const Vec3 & | GetV (void) const |
| virtual const Vec3 & | GetW (void) const |
| virtual const Vec3 & | GetXPP (void) const |
| virtual const Vec3 & | GetWP (void) const |
| Public Member Functions inherited from RigidBodyKinematics | |
| virtual | ~RigidBodyKinematics (void) |
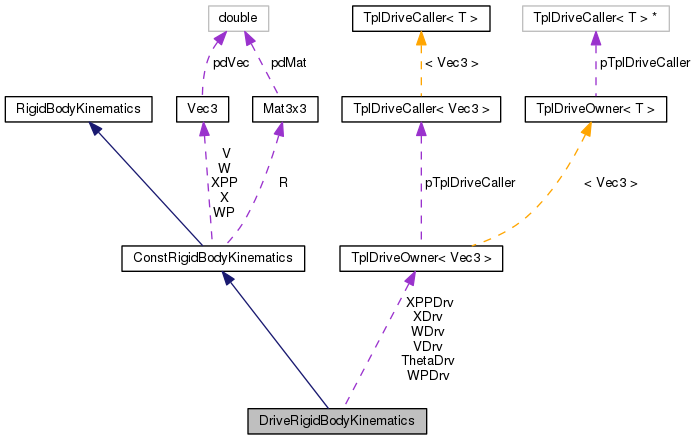
Private Attributes | |
| TplDriveOwner< Vec3 > | XDrv |
| TplDriveOwner< Vec3 > | ThetaDrv |
| TplDriveOwner< Vec3 > | VDrv |
| TplDriveOwner< Vec3 > | WDrv |
| TplDriveOwner< Vec3 > | XPPDrv |
| TplDriveOwner< Vec3 > | WPDrv |
Additional Inherited Members | |
| Protected Attributes inherited from ConstRigidBodyKinematics | |
| Vec3 | X |
| Mat3x3 | R |
| Vec3 | V |
| Vec3 | W |
| Vec3 | XPP |
| Vec3 | WP |
Definition at line 66 of file rbk_impl.h.
| DriveRigidBodyKinematics::DriveRigidBodyKinematics | ( | const TplDriveCaller< Vec3 > * | pXDrv, |
| const TplDriveCaller< Vec3 > * | pThetaDrv, | ||
| const TplDriveCaller< Vec3 > * | pVDrv, | ||
| const TplDriveCaller< Vec3 > * | pWDrv, | ||
| const TplDriveCaller< Vec3 > * | pXPPDrv, | ||
| const TplDriveCaller< Vec3 > * | pWPDrv | ||
| ) |
Definition at line 97 of file rbk_impl.cc.
References Update().
|
virtual |
Definition at line 114 of file rbk_impl.cc.
References NO_OP.
|
virtual |
Reimplemented from RigidBodyKinematics.
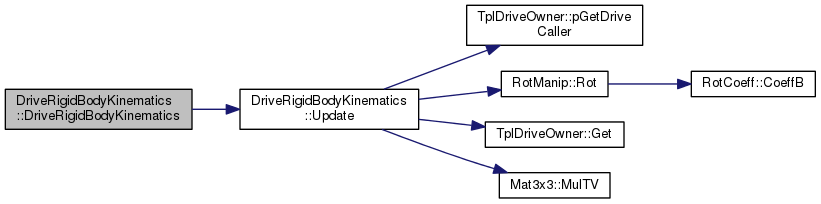
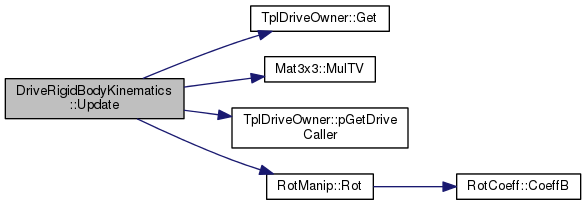
Definition at line 120 of file rbk_impl.cc.
References TplDriveOwner< T >::Get(), Mat3x3::MulTV(), TplDriveOwner< T >::pGetDriveCaller(), ConstRigidBodyKinematics::R, RotManip::Rot(), ThetaDrv, ConstRigidBodyKinematics::V, VDrv, ConstRigidBodyKinematics::W, WDrv, ConstRigidBodyKinematics::WP, WPDrv, ConstRigidBodyKinematics::X, XDrv, ConstRigidBodyKinematics::XPP, and XPPDrv.
Referenced by DriveRigidBodyKinematics().
|
private |
Definition at line 69 of file rbk_impl.h.
Referenced by Update().
|
private |
Definition at line 70 of file rbk_impl.h.
Referenced by Update().
|
private |
Definition at line 71 of file rbk_impl.h.
Referenced by Update().
|
private |
Definition at line 73 of file rbk_impl.h.
Referenced by Update().
|
private |
Definition at line 68 of file rbk_impl.h.
Referenced by Update().
|
private |
Definition at line 72 of file rbk_impl.h.
Referenced by Update().
 1.8.7
1.8.7 
