|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
#include <matvec3.h>

Public Member Functions | |
| Mat3x3 (void) | |
| Mat3x3 (const doublereal &m11, const doublereal &m21, const doublereal &m31, const doublereal &m12, const doublereal &m22, const doublereal &m32, const doublereal &m13, const doublereal &m23, const doublereal &m33) | |
| Mat3x3 (const Mat3x3 &m) | |
| Mat3x3 (const Vec3 &v1, const Vec3 &v2, const Vec3 &v3) | |
| Mat3x3 (const doublereal *pd, integer iSize) | |
| Mat3x3 (const Mat3x3_Manip &Manip) | |
| Mat3x3 (const Mat3x3_Manip &Manip, const doublereal d) | |
| Mat3x3 (const Mat3x3_Manip &Manip, const Vec3 &v) | |
| Mat3x3 (const Mat3x3_Manip &Manip, const Vec3 &v1, const Vec3 &v2) | |
| Mat3x3 (const doublereal &d, const Vec3 &v) | |
| ~Mat3x3 (void) | |
| const doublereal * | pGetMat (void) const |
| doublereal * | pGetMat (void) |
| void | Put (unsigned short int iRow, unsigned short int iCol, const doublereal &dCoef) |
| const doublereal & | dGet (unsigned short int iRow, unsigned short int iCol) const |
| doublereal & | operator() (unsigned short int iRow, unsigned short int iCol) |
| const doublereal & | operator() (unsigned short int iRow, unsigned short int iCol) const |
| const Mat3x3 & | Tens (const Vec3 &a, const Vec3 &b) |
| Mat3x3 | Transpose (void) const |
| Vec3 | Ax (void) const |
| doublereal | Trace (void) const |
| Mat3x3 | Symm (void) const |
| Mat3x3 | Symm2 (void) const |
| const Mat3x3 & | Symm (const Mat3x3 &m) |
| Mat3x3 | Skew (void) const |
| const Mat3x3 & | Skew (const Mat3x3 &m) |
| Vec3 | GetVec (unsigned short int i) const |
| Vec3 | GetCol (unsigned short int i) const |
| Vec3 | GetRow (unsigned short int i) const |
| void | PutVec (unsigned short int i, const Vec3 &v) |
| void | AddVec (unsigned short int i, const Vec3 &v) |
| void | SubVec (unsigned short int i, const Vec3 &v) |
| doublereal | dDet (void) const |
| Mat3x3 | Inv (const doublereal &ddet) const |
| Mat3x3 | Inv (void) const |
| Vec3 | Solve (const Vec3 &v) const |
| Vec3 | Solve (const doublereal &d, const Vec3 &v) const |
| Vec3 | LDLSolve (const Vec3 &v) const |
| bool | EigSym (Vec3 &EigenValues) const |
| bool | EigSym (Vec3 &EigenValues, Mat3x3 &EigenVectors) const |
| void | GetFrom (const doublereal *pd, integer iSize) |
| void | AddTo (doublereal *pd, integer iNRows) const |
| void | PutTo (doublereal *pd, integer iNRows) const |
| Mat3x3 & | operator= (const Mat3x3 &m) |
| Mat3x3 | operator+ (const Mat3x3 &m) const |
| Mat3x3 & | operator+= (const Mat3x3 &m) |
| Mat3x3 | operator- (const Mat3x3 &m) const |
| Mat3x3 & | operator-= (const Mat3x3 &m) |
| Mat3x3 | operator* (const doublereal &d) const |
| Mat3x3 & | operator*= (const doublereal &d) |
| Mat3x3 | operator/ (const doublereal &d) const |
| Mat3x3 & | operator/= (const doublereal &d) |
| Vec3 | operator* (const Vec3 &v) const |
| bool | IsNull (void) const |
| bool | IsExactlySame (const Mat3x3 &m) const |
| bool | IsSame (const Mat3x3 &m, const doublereal &dTol) const |
| bool | IsSymmetric (void) const |
| bool | IsSymmetric (const doublereal &dTol) const |
| bool | IsDiag (void) const |
| bool | IsDiag (const doublereal &dTol) const |
| Mat3x3 | operator* (const Mat3x3 &m) const |
| Mat3x3 | MulMT (const Mat3x3 &m) const |
| Vec3 | MulTV (const Vec3 &v) const |
| Mat3x3 | MulTM (const Mat3x3 &m) const |
| Mat3x3 | MulTMT (const Mat3x3 &m) const |
| Mat3x3 | MulVCross (const Vec3 &v) const |
| Mat3x3 | MulTVCross (const Vec3 &v) const |
| doublereal | Tr (void) const |
| void | Reset (void) |
| std::ostream & | Write (std::ostream &out, const char *sFill=" ", const char *sFill2=NULL) const |
Protected Attributes | |
| doublereal | pdMat [9] |
Friends | |
| class | Vec3 |
| class | SparseSubMatrixHandler |
| class | Mat3x3_Manip |
| class | Mat3xN |
| class | MatNx3 |
|
inline |
Definition at line 568 of file matvec3.h.
References NO_OP.
Referenced by Inv(), MulMT(), MulTM(), MulTMT(), MulTVCross(), MulVCross(), operator*(), operator+(), operator-(), operator/(), Skew(), Symm(), Symm2(), and Transpose().
|
inline |
Definition at line 581 of file matvec3.h.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, and pdMat.
|
inline |
Definition at line 598 of file matvec3.h.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, and pdMat.
Definition at line 653 of file matvec3.h.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, pdMat, Vec3::pdVec, V1, V2, and V3.
|
inline |
|
inline |
Definition at line 682 of file matvec3.h.
References Mat3x3_Manip::Manipulate().

|
inline |
Definition at line 691 of file matvec3.h.
References Mat3x3_Manip::Manipulate().

|
inline |
Definition at line 700 of file matvec3.h.
References Mat3x3_Manip::Manipulate().

|
inline |
Definition at line 709 of file matvec3.h.
References Mat3x3_Manip::Manipulate().

|
inline |
Definition at line 718 of file matvec3.h.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, pdMat, Vec3::pdVec, V1, V2, and V3.
|
inline |
|
inline |
Definition at line 1002 of file matvec3.h.
References ASSERT, M11, M12, M13, M21, M22, M23, M31, M32, M33, and pdMat.
Definition at line 927 of file matvec3.h.
|
inline |
Definition at line 827 of file matvec3.h.
References M12, M13, M21, M23, M31, M32, pdMat, and Vec3.
Referenced by MatExp::Ax(), CGR_Rot::Param_Manip::Manipulate(), MatR2gparam(), MatR2LinParam(), Skew(), and RotManip::VecRot().
| doublereal Mat3x3::dDet | ( | void | ) | const |
Definition at line 122 of file matvec3.cc.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, and pdMat.
Referenced by EigSym(), Inv(), main(), and Solve().
|
inline |
Definition at line 770 of file matvec3.h.
Referenced by Mat6x6::dGet(), MatR2EulerParams(), operator<<(), MatExp::Write(), and Mat6x6::Write().
Definition at line 255 of file matvec3.cc.
Referenced by Inertia::Collect_int().
Definition at line 279 of file matvec3.cc.
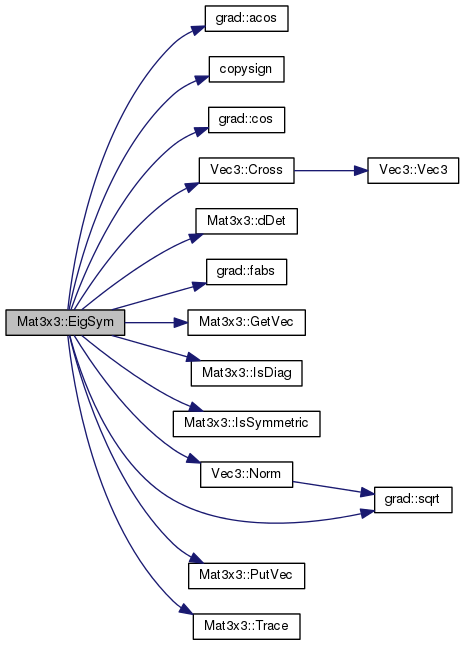
References grad::acos(), copysign(), grad::cos(), Vec3::Cross(), dDet(), Eye3, grad::fabs(), GetVec(), IsDiag(), IsSymmetric(), M11, M22, M33, M_PI, Vec3::Norm(), pdMat, PutVec(), grad::sqrt(), Trace(), and Vec3.
Definition at line 903 of file matvec3.h.
References ASSERT, pdMat, and Vec3.
Referenced by HydrodynamicPlainBearing::AssJac(), InlineFriction::AssJac(), asynchronous_machine::AssJac(), Motor::AssJac(), InlineFriction::AssRes(), asynchronous_machine::AssRes(), Motor::AssRes(), asynchronous_machine::asynchronous_machine(), HydrodynamicPlainBearing::ComputeResidual(), Motor::dGetPhiMechanical(), Motor::GetAxisOfRotation(), InlineFriction::InitialAssJac(), InlineFriction::InitialAssRes(), grad::VecRotInit< T, MatrixExpr >::Initialize(), Membrane4EAS::Membrane4EAS(), ReadElectric(), Shell4EAS::Shell4EAS(), Shell4EASANS::Shell4EASANS(), and InlineFriction::SlidingVelocity().
|
inline |
Definition at line 976 of file matvec3.h.
References ASSERT, M11, M12, M13, M21, M22, M23, M31, M32, M33, and pdMat.
Referenced by Mat3x3().
Definition at line 893 of file matvec3.h.
References ASSERT, pdMat, and Vec3.
Referenced by ViscousAxialJoint::AfterPredict(), UniversalHingeJoint::AssJac(), Brake::AssJac(), PlaneHingeJoint::AssJac(), BeamSliderJoint::AssJac(), TotalJoint::AssJac(), UniversalRotationJoint::AssJac(), UniversalPinJoint::AssJac(), PlaneRotationJoint::AssJac(), TotalPinJoint::AssJac(), AxialRotationJoint::AssJac(), PlanePinJoint::AssJac(), InLineJoint::AssRes(), UniversalHingeJoint::AssRes(), Brake::AssRes(), PlaneHingeJoint::AssRes(), BeamSliderJoint::AssRes(), InLineWithOffsetJoint::AssRes(), UniversalRotationJoint::AssRes(), AeroDynModule::AssRes(), UniversalPinJoint::AssRes(), PlaneRotationJoint::AssRes(), AxialRotationJoint::AssRes(), CyclocopterUniform1D::AssRes(), PlanePinJoint::AssRes(), ViscousAxialJoint::AssVec(), TotalEquation::dGetPrivData(), TotalJoint::dGetPrivData(), TotalReaction::dGetPrivData(), StructNode::dGetPrivData(), EigSym(), getrotorparams(), ScalarFuncWindProfile::GetVelocity(), PowerLawWindProfile::GetVelocity(), LogarithmicWindProfile::GetVelocity(), Rotor::Init(), UniversalHingeJoint::InitialAssJac(), PrismaticJoint::InitialAssJac(), PlaneHingeJoint::InitialAssJac(), UniversalRotationJoint::InitialAssJac(), UniversalPinJoint::InitialAssJac(), PlaneRotationJoint::InitialAssJac(), Modal::InitialAssJac(), ViscousAxialJoint::InitialAssJac(), TotalPinJoint::InitialAssJac(), ViscoElasticAxialJoint::InitialAssJac(), AxialRotationJoint::InitialAssJac(), PlanePinJoint::InitialAssJac(), InLineJoint::InitialAssRes(), UniversalHingeJoint::InitialAssRes(), PrismaticJoint::InitialAssRes(), PlaneHingeJoint::InitialAssRes(), InLineWithOffsetJoint::InitialAssRes(), UniversalRotationJoint::InitialAssRes(), UniversalPinJoint::InitialAssRes(), PlaneRotationJoint::InitialAssRes(), Modal::InitialAssRes(), ViscousAxialJoint::InitialAssRes(), AxialRotationJoint::InitialAssRes(), PlanePinJoint::InitialAssRes(), Rotor::InitParam(), UniversalPinJoint::Output(), ReadModal(), PrismaticJoint::Restart(), UniversalHingeJoint::Restart(), SphericalHingeJoint::Restart(), GimbalRotationJoint::Restart(), ViscousBody::Restart(), DriveHingeJoint::Restart(), DeformableAxialJoint::Restart(), Brake::Restart(), PlaneHingeJoint::Restart(), DeformableDispJoint::Restart(), TotalEquation::Restart(), TotalJoint::Restart(), DeformableHingeJoint::Restart(), DeformableJoint::Restart(), UniversalRotationJoint::Restart(), PlaneRotationJoint::Restart(), UniversalPinJoint::Restart(), AerodynamicBody::Restart(), TotalReaction::Restart(), TotalPinJoint::Restart(), AerodynamicBeam::Restart(), AxialRotationJoint::Restart(), AerodynamicBeam2::Restart(), PlanePinJoint::Restart(), StructNode::Restart(), HBeam::Restart_(), Beam2::Restart_(), Beam::Restart_(), and AircraftInstruments::Update().
| Mat3x3 Mat3x3::Inv | ( | const doublereal & | ddet | ) | const |
Definition at line 133 of file matvec3.cc.
References ASSERT, grad::fabs(), M11, M12, M13, M21, M22, M23, M31, M32, M33, Mat3x3(), and pdMat.
Referenced by main().

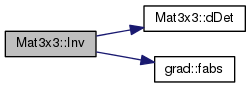
| Mat3x3 Mat3x3::Inv | ( | void | ) | const |
Definition at line 152 of file matvec3.cc.
References dDet(), grad::fabs(), and MBDYN_EXCEPT_ARGS.
|
inline |
Definition at line 1284 of file matvec3.h.
References M12, M13, M21, M23, M31, M32, and pdMat.
Referenced by EigSym().
|
inline |
Definition at line 1298 of file matvec3.h.
References ASSERT, grad::fabs(), M12, M13, M21, M23, M31, M32, and pdMat.

Definition at line 1237 of file matvec3.h.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, and pdMat.
Referenced by DataManager::ReadControl().
|
inline |
Definition at line 1231 of file matvec3.h.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, and pdMat.
|
inline |
Definition at line 1249 of file matvec3.h.
References pdMat, and grad::sqrt().
Referenced by MBDynParser::GetMatR2vec(), ReadElectric(), and ReferenceFrame::ReferenceFrame().

|
inline |
Definition at line 1260 of file matvec3.h.
References M12, M13, M21, M23, M31, M32, and pdMat.
Referenced by CenterOfMass::Collect_int(), AutomaticStructElem::ComputeAccelerations(), and EigSym().
|
inline |
Definition at line 1271 of file matvec3.h.
References ASSERT, grad::fabs(), M12, M13, M21, M23, M31, M32, and pdMat.

Definition at line 199 of file matvec3.cc.
References ASSERT, M11, M12, M13, M21, M22, M23, M31, M32, M33, pdMat, and Vec3.
Referenced by CenterOfMass::Collect_int(), AutomaticStructElem::ComputeAccelerations(), main(), and testSolve().
multiply by another matrix, transposed: this * m^T
Definition at line 444 of file matvec3.cc.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, Mat3x3(), and pdMat.
Referenced by ElasticHingeJoint::AfterPredict(), StructDispNode::AfterPredict(), ElasticHingeJointInv::AfterPredict(), Body::AfterPredict(), ViscoElasticHingeJoint::AfterPredict(), ViscoElasticHingeJointInv::AfterPredict(), StructNode::AfterPredict(), DataManager::AssConstrRes(), Shell4EAS::AssJac(), AerodynamicBeam::AssJac(), ElasticAxialJoint::AssMat(), ElasticHingeJoint::AssMat(), LoadIncNorm::AssRes(), TotalJoint::AssRes(), ClampJoint::AssRes(), DynamicBody::AssRes(), TotalPinJoint::AssRes(), ModalBody::AssRes(), StaticBody::AssRes(), StructNode::BeforePredict(), Inertia::Collect_int(), Shell4EAS::ComputeIPCurvature(), Shell4EASANS::ComputeIPCurvature(), Modal::GetJ_int(), Body::GetJ_int(), ClampJoint::InitialAssRes(), DynamicBody::InitialAssRes(), TotalPinJoint::InitialAssRes(), DataManager::InitialJointAssembly(), Shell4EAS::InterpolateOrientation(), Shell4EASANS::InterpolateOrientation(), main(), MultMRt(), MultRMRt(), MultRMRtGammam1(), ReadBody(), DynamicBody::SetValue(), InvAngularConstitutiveLaw::Update(), and RelFrameDummyStructNode::Update_int().

multiply self transposed by another matrix: this^T * m
Definition at line 500 of file matvec3.cc.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, Mat3x3(), and pdMat.
Referenced by PlanePinJoint::AfterConvergence(), ElasticJoint::AfterPredict(), ElasticJointInv::AfterPredict(), ViscoElasticJoint::AfterPredict(), StructNode::AfterPredict(), anglerel(), HydrodynamicPlainBearing::AssJac(), Motor::AssJac(), AerodynamicBody::AssJac(), Shell4EAS::AssJac(), AerodynamicBeam::AssJac(), AerodynamicBeam2::AssJac(), TotalEquation::AssRes(), TotalJoint::AssRes(), ElasticJoint::AssVec(), AerodynamicBeam::AssVec(), ViscoElasticJoint::AssVec(), StructDispNode::BeforePredict(), StructNode::BeforePredict(), PlanePinJoint::dGetPrivData(), MBDynParser::GetMatR2vec(), MBDynParser::GetMatRel(), MBDynParser::GetRotRel(), TotalEquation::InitialAssRes(), TotalJoint::InitialAssRes(), ModalMappingExt::ModalMappingExt(), DeformableJoint::Output(), StructExtForce::Output(), TotalEquation::Output(), TotalJoint::Output(), TotalReaction::Output(), PlanePinJoint::Output(), Inertia::Output_int(), ReadBeam(), ReadBeam2(), ReferenceFrame::ReferenceFrame(), ModalMappingExt::Send(), StructExtForce::SendToFileDes(), StructExtForce::SendToStream(), StructMappingExtForce::SendToStream(), StructMembraneMappingExtForce::SendToStream(), PlaneHingeJoint::SetValue(), TotalEquation::SetValue(), TotalJoint::SetValue(), StructDispNode::SetValue(), PlaneRotationJoint::SetValue(), TotalReaction::SetValue(), TotalPinJoint::SetValue(), AxialRotationJoint::SetValue(), PlanePinJoint::SetValue(), StructNode::SetValue(), Shell4EAS::UpdateNodalAndAveragePosAndOrientation(), and Shell4EASANS::UpdateNodalAndAveragePosAndOrientation().

multiply self transposed by another matrix, transposed: this^T * m^T
Definition at line 538 of file matvec3.cc.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, Mat3x3(), and pdMat.
Referenced by Shell4EAS::AssJac().

multiply self transposed by a vector: this^T * v
Definition at line 482 of file matvec3.cc.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, pdMat, Vec3::pdVec, V1, V2, V3, and Vec3.
Referenced by AerodynamicModal::AerodynamicModal(), AeroDynModule::AeroDynModule(), ViscousBody::AfterPredict(), Beam2::AfterPredict(), ElasticJoint::AfterPredict(), ElasticJointInv::AfterPredict(), ViscoElasticBeam2::AfterPredict(), ViscousJoint::AfterPredict(), ViscousHingeJointInv::AfterPredict(), ViscoElasticJoint::AfterPredict(), ViscoElasticHingeJointInv::AfterPredict(), HydrodynamicPlainBearing::AssJac(), LoadIncNorm::AssJac(), AerodynamicBody::AssJac(), Shell4EAS::AssJac(), AerodynamicBeam::AssJac(), AerodynamicBeam2::AssJac(), ModalBody::AssMats(), ModuleIMU::AssRes(), InlineFriction::AssRes(), TotalEquation::AssRes(), TotalJoint::AssRes(), AeroDynModule::AssRes(), Shell4EAS::AssRes(), Shell4EASANS::AssRes(), ModuleIMUConstraint::AssRes(), TotalPinJoint::AssRes(), Beam2::AssStiffnessVec(), ViscoElasticBeam2::AssStiffnessVec(), ViscousBody::AssVec(), GenericAerodynamicForce::AssVec(), ElasticJoint::AssVec(), AerodynamicBody::AssVec(), ElasticDispJointInv::AssVec(), ElasticJointInv::AssVec(), AerodynamicBeam::AssVec(), ViscousJoint::AssVec(), AerodynamicBeam2::AssVec(), ViscousHingeJointInv::AssVec(), ViscoElasticJoint::AssVec(), StructDispNode::BeforePredict(), StructNode::BeforePredict(), HydrodynamicPlainBearing::ComputeResidual(), NodeDistDriveCaller::dGet(), NodeDistDriveCaller::dGetP(), Motor::dGetPhiMechanical(), PlaneHingeJoint::dGetPrivData(), TotalEquation::dGetPrivData(), TotalJoint::dGetPrivData(), PlaneRotationJoint::dGetPrivData(), Body::dGetPrivData(), TotalReaction::dGetPrivData(), Beam2::DsDxi(), Beam::DsDxi(), getelemparams(), DynamicBody::GetG_int(), MBDynParser::GetOmeRel(), MBDynParser::GetPosRel(), MBDynParser::GetVecRel(), AirProperties::GetVelocity(), MBDynParser::GetVelRel(), getvnvt(), InlineFriction::InitialAssRes(), DataManager::InitialJointAssembly(), ModalMappingExt::ModalMappingExt(), ModuleIMU::ModuleIMU(), ModuleIMUConstraint::ModuleIMUConstraint(), Inertia::Output(), StructExtForce::Output(), TotalEquation::Output(), TotalJoint::Output(), ClampJoint::Output(), TotalReaction::Output(), Inertia::Output_int(), ReadStructMappingExtForce(), ExtRigidForceEDGE::Send(), ModalMappingExt::Send(), StructExtForce::SendToFileDes(), StructMappingExtForce::SendToFileDes(), StructMembraneMappingExtForce::SendToFileDes(), StructExtEDGEForce::SendToStream(), StructExtForce::SendToStream(), StructMappingExtForce::SendToStream(), StructMembraneMappingExtForce::SendToStream(), TotalEquation::SetValue(), TotalJoint::SetValue(), StructDispNode::SetValue(), TotalReaction::SetValue(), ModuleIMUConstraint::SetValue(), PlanePinJoint::SetValue(), StructNode::SetValue(), Shell4EAS::Shell4EAS(), Shell4EASANS::Shell4EASANS(), InlineFriction::SlidingVelocity(), AircraftInstruments::Update(), DriveRigidBodyKinematics::Update(), and InvAngularConstitutiveLaw::Update().
multiply self transposed times vCross
Definition at line 596 of file matvec3.cc.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, Mat3x3(), pdMat, Vec3::pdVec, V1, V2, and V3.
Referenced by ModalBody::AssMats().

multiply self times vCross
Definition at line 576 of file matvec3.cc.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, Mat3x3(), pdMat, Vec3::pdVec, V1, V2, and V3.

|
inline |
|
inline |
|
inline |
Definition at line 1142 of file matvec3.h.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, Mat3x3(), and pdMat.

Definition at line 1224 of file matvec3.h.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, pdMat, Vec3::pdVec, V1, V2, V3, and Vec3.
Definition at line 1318 of file matvec3.h.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, Mat3x3(), and pdMat.

|
inline |
Definition at line 1161 of file matvec3.h.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, and pdMat.
Definition at line 1074 of file matvec3.h.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, Mat3x3(), and pdMat.

Definition at line 1090 of file matvec3.h.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, and pdMat.
Definition at line 1108 of file matvec3.h.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, Mat3x3(), and pdMat.

Definition at line 1124 of file matvec3.h.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, and pdMat.
|
inline |
Definition at line 1181 of file matvec3.h.
References ASSERT, M11, M12, M13, M21, M22, M23, M31, M32, M33, Mat3x3(), and pdMat.

|
inline |
Definition at line 1202 of file matvec3.h.
References ASSERT, M11, M12, M13, M21, M22, M23, M31, M32, M33, and pdMat.
Definition at line 1055 of file matvec3.h.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, and pdMat.
|
inline |
Definition at line 743 of file matvec3.h.
References pdMat.
Referenced by FullMatrixHandler::Add(), FullMatrixHandler::AddT(), grad::Mat3x3DirectExpr::bHaveReferenceTo(), grad::Mat3x3DirectExpr::GetCol(), grad::Mat3x3DirectExpr::GetRow(), GlauertRotor::Init(), ManglerRotor::Init(), DynamicInflowRotor::Init(), PetersHeRotor::Init(), Mat3x3Zero_Manip::Manipulate(), Mat3x3DEye_Manip::Manipulate(), Mat3x3Diag_Manip::Manipulate(), MatCross_Manip::Manipulate(), MatCrossCross_Manip::Manipulate(), operator-(), operator<<(), DeformableHingeJoint::Output(), DeformableJoint::Output(), StructDispNode::Output(), Beam2::Output(), StructNode::Output(), Mat6x6::pGetMat(), FullMatrixHandler::Put(), SparseSubMatrixHandler::PutMat3x3(), FullMatrixHandler::PutT(), StructExtForce::SendToFileDes(), StructMappingExtForce::SendToFileDes(), ExtModalForce::SendToFileDes(), StructMembraneMappingExtForce::SendToFileDes(), FullMatrixHandler::Sub(), and FullMatrixHandler::SubT().
|
inline |
|
inline |
Definition at line 758 of file matvec3.h.
Referenced by Mat6x6::Put(), CubicElasticGenericConstitutiveLaw< Vec3, Mat3x3 >::Update(), and CubicViscoElasticGenericConstitutiveLaw< Vec3, Mat3x3 >::Update().
|
inline |
Definition at line 1029 of file matvec3.h.
References ASSERT, M11, M12, M13, M21, M22, M23, M31, M32, M33, and pdMat.
Definition at line 918 of file matvec3.h.
References ASSERT, pdMat, Vec3::pdVec, V1, V2, and V3.
Referenced by Modal::AssRes(), and EigSym().
| void Mat3x3::Reset | ( | void | ) |
Definition at line 613 of file matvec3.cc.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, and pdMat.
Referenced by AerodynamicBeam::AssJac(), AerodynamicBeam2::AssJac(), Modal::AssRes(), and Mat6x6::Reset().
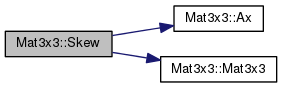
| Mat3x3 Mat3x3::Skew | ( | void | ) | const |
Definition at line 629 of file matvec3.cc.
References Ax(), Mat3x3(), and MatCross.
Definition at line 877 of file matvec3.h.
References M11, M12, M13, M21, M22, M23, M31, M32, and pdMat.
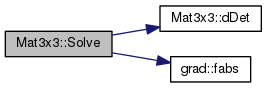
Definition at line 186 of file matvec3.cc.
References dDet(), grad::fabs(), and MBDYN_EXCEPT_ARGS.
Referenced by RotorTrimBase::AssRes(), and testSolve().
| Vec3 Mat3x3::Solve | ( | const doublereal & | d, |
| const Vec3 & | v | ||
| ) | const |
Definition at line 166 of file matvec3.cc.
References ASSERT, grad::fabs(), M11, M12, M13, M21, M22, M23, M31, M32, M33, pdMat, Vec3::pGetVec(), V1, V2, V3, and Vec3.
Definition at line 936 of file matvec3.h.
|
inline |
Definition at line 840 of file matvec3.h.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, Mat3x3(), and pdMat.
Referenced by CenterOfMass::Collect_int(), and RotManip::VecRot().

Definition at line 864 of file matvec3.h.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, and pdMat.
|
inline |
Definition at line 852 of file matvec3.h.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, Mat3x3(), and pdMat.
Referenced by Modal::AssJac(), Modal::AssRes(), and Modal::GetJ_int().

Definition at line 799 of file matvec3.h.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, pdMat, Vec3::pdVec, V1, V2, and V3.
Referenced by ElasticAxialJoint::AfterPredict(), ViscousAxialJoint::AfterPredict(), ViscoElasticAxialJoint::AfterPredict(), Motor::AssJac(), ViscousAxialJoint::InitialAssJac(), and ViscoElasticAxialJoint::InitialAssJac().
|
inline |
Definition at line 1361 of file matvec3.h.
References M11, M22, M33, and pdMat.
Referenced by MatR2EulerParams().
|
inline |
Definition at line 836 of file matvec3.h.
References M11, M22, M33, and pdMat.
Referenced by EigSym(), CGR_Rot::Param_Manip::Manipulate(), MatR2gparam(), and RotManip::VecRot().
|
inline |
Definition at line 816 of file matvec3.h.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, Mat3x3(), and pdMat.
Referenced by Brake::AfterConvergence(), DriveHingeJoint::AfterPredict(), ElasticHingeJointInv::AfterPredict(), ViscousHingeJointInv::AfterPredict(), ViscoElasticHingeJointInv::AfterPredict(), HydrodynamicPlainBearing::AssJac(), AerodynamicBody::AssJac(), AerodynamicBeam::AssJac(), AerodynamicBeam2::AssJac(), Modal::AssRes(), CyclocopterNoInflow::AssRes(), CyclocopterUniform1D::AssRes(), CyclocopterUniform2D::AssRes(), CyclocopterPolimi::AssRes(), HBeam::AssStiffnessVec(), GimbalRotationJoint::AssVec(), ElasticJointInv::AssVec(), Compute(), ViscousBody::dGetPrivData(), DeformableJoint::dGetPrivData(), HBeam::DsDxi(), LocalNodeResForces::Force(), getelemparams(), MBDynParser::GetMatAbs(), RoTrManip::Helix(), InLineWithOffsetJoint::InitialAssJac(), InPlaneWithOffsetJoint::InitialAssJac(), Modal::InitialAssRes(), Rotor::InitParam(), main(), LocalNodeResForces::Moment(), GimbalRotationJoint::Output(), DriveDisplacementJoint::Output(), UniversalPinJoint::Output(), DataManager::ReadOneElem(), ModalExt::Send(), DriveDisplacementJoint::SetValue(), DriveHingeJoint::SetValue(), PrismaticJoint::SetValue(), DeformableAxialJoint::SetValue(), DeformableDispJoint::SetValue(), DeformableHingeJoint::SetValue(), DeformableJoint::SetValue(), TotalJoint::SetValue(), DriveDisplacementPinJoint::SetValue(), TotalPinJoint::SetValue(), and MatExp::Transpose().

| std::ostream & Mat3x3::Write | ( | std::ostream & | out, |
| const char * | sFill = " ", |
||
| const char * | sFill2 = NULL |
||
| ) | const |
Definition at line 722 of file matvec3.cc.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, and pdMat.
Referenced by ReadModal(), ReadStructNode(), AircraftInstruments::Restart(), TotalForce::Restart(), and Write().
|
friend |
|
friend |
|
friend |
|
protected |
Definition at line 559 of file matvec3.h.
Referenced by Mat3xN::AddMat3x3(), AddTo(), AddVec(), Ax(), Vec3::Cross(), dDet(), dGet(), EigSym(), GetCol(), GetFrom(), GetRow(), GetVec(), Inv(), IsDiag(), IsExactlySame(), IsNull(), IsSame(), IsSymmetric(), LDLSolve(), Mat3xN::LeftMult(), Mat3x3(), MulMT(), MulTM(), MulTMT(), MulTV(), MulTVCross(), MulVCross(), operator()(), Vec3::operator*(), operator*(), operator*=(), operator+(), operator+=(), operator-(), operator-=(), operator/(), operator/=(), operator=(), pGetMat(), Put(), Mat3xN::PutMat3x3(), PutTo(), PutVec(), Reset(), MatNx3::RightMult(), Skew(), Solve(), Mat3xN::SubMat3x3(), SubVec(), Symm(), Symm2(), Tens(), Tr(), Trace(), Transpose(), and Write().
 1.8.7
1.8.7 

