|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
#include <iostream>#include <limits>#include "ac/f2c.h"#include "myassert.h"#include "except.h"#include "solman.h"#include "tpls.h"

Go to the source code of this file.
Classes | |
| class | Vec3_Manip |
| class | Vec3 |
| class | Mat3x3_Manip |
| class | Mat3x3 |
| class | Mat3x3Zero_Manip |
| class | Mat3x3DEye_Manip |
| class | Mat3x3Diag_Manip |
| class | MatCross_Manip |
| class | MatCrossCross_Manip |
| class | CGR_Rot::Param_Manip |
| class | CGR_Rot::MatR_Manip |
| class | CGR_Rot::MatG_Manip |
| class | CGR_Rot::MatGm1_Manip |
Namespaces | |
| CGR_Rot | |
Enumerations | |
| enum | { V1 = 0, V2 = 1, V3 = 2 } |
| enum | { M11 = 0, M12 = 3, M13 = 6, M21 = 1, M22 = 4, M23 = 7, M31 = 2, M32 = 5, M33 = 8 } |
| enum | OrientationDescription { UNKNOWN_ORIENTATION_DESCRIPTION = -1, EULER_123 = 0, EULER_313, EULER_321, ORIENTATION_VECTOR, ORIENTATION_MATRIX, LAST_ORIENTATION_DESCRIPTION } |
Functions | |
| Vec3 | operator- (const Vec3 &v) |
| Mat3x3 | operator- (const Mat3x3 &v) |
| std::ostream & | operator<< (std::ostream &out, const Vec3 &v) |
| std::ostream & | operator<< (std::ostream &out, const Mat3x3 &m) |
| std::ostream & | Write (std::ostream &out, const doublereal &d, const char *) |
| std::ostream & | Write (std::ostream &out, const Vec3 &v, const char *s=" ") |
| std::ostream & | Write (std::ostream &out, const Mat3x3 &m, const char *s=" ", const char *s2=NULL) |
| template<> | |
| const doublereal & | mb_zero< doublereal > (void) |
| template<> | |
| const Vec3 & | mb_zero< Vec3 > (void) |
| template<> | |
| const Mat3x3 & | mb_zero< Mat3x3 > (void) |
| template<> | |
| doublereal | mb_deye< doublereal > (const doublereal d) |
| template<> | |
| doublereal & | mb_deye< doublereal > (doublereal &out, const doublereal d) |
| template<> | |
| Mat3x3 | mb_deye< Mat3x3 > (const doublereal d) |
| template<> | |
| Mat3x3 & | mb_deye< Mat3x3 > (Mat3x3 &out, const doublereal d) |
| Vec3 | MatR2gparam (const Mat3x3 &R) |
| Vec3 | MatR2LinParam (const Mat3x3 &R) |
| Mat3x3 | MatR2vec (unsigned short int ia, const Vec3 &va, unsigned short int ib, const Vec3 &vb) |
| Vec3 | MatR2EulerAngles (const Mat3x3 &R) |
| Vec3 | MatR2EulerAngles123 (const Mat3x3 &R) |
| Vec3 | MatR2EulerAngles313 (const Mat3x3 &R) |
| Vec3 | MatR2EulerAngles321 (const Mat3x3 &R) |
| void | MatR2EulerParams (const Mat3x3 &R, doublereal &e0, Vec3 &e) |
| Vec3 | Unwrap (const Vec3 &vPrev, const Vec3 &v) |
| Mat3x3 | EulerAngles2MatR (const Vec3 &v) |
| Mat3x3 | EulerAngles123_2MatR (const Vec3 &v) |
| Mat3x3 | EulerAngles313_2MatR (const Vec3 &v) |
| Mat3x3 | EulerAngles321_2MatR (const Vec3 &v) |
| template<class T > | |
| bool | IsNull (const T &t) |
| template<class T > | |
| bool | IsExactlySame (const T &t1, const T &t2) |
| template<class T > | |
| bool | IsSame (const T &t1, const T &t2, const doublereal &dTol) |
| template<> | |
| bool | IsNull (const doublereal &d) |
| template<> | |
| bool | IsExactlySame (const doublereal &d1, const doublereal &d2) |
| template<> | |
| bool | IsSame (const doublereal &d1, const doublereal &d2, const doublereal &dTol) |
| Vec3 | MultRV (const Vec3 &v, const Mat3x3 &R) |
| Mat3x3 | MultRM (const Mat3x3 &m, const Mat3x3 &R) |
| Mat3x3 | MultMRt (const Mat3x3 &m, const Mat3x3 &R) |
| Mat3x3 | MultRMRt (const Mat3x3 &m, const Mat3x3 &R) |
Variables | |
| const Mat3x3Zero_Manip | Mat3x3Zero |
| const Mat3x3DEye_Manip | Mat3x3DEye |
| const Mat3x3Diag_Manip | Mat3x3Diag |
| const MatCross_Manip | MatCross |
| const MatCrossCross_Manip | MatCrossCross |
| const doublereal | Zero1 |
| const Vec3 | Zero3 |
| const Mat3x3 | Zero3x3 |
| const Mat3x3 | Eye3 |
| const doublereal | dRaDegr |
| anonymous enum |
| Enumerator | |
|---|---|
| V1 | |
| V2 | |
| V3 | |
| anonymous enum |
| Enumerator | |
|---|---|
| M11 | |
| M12 | |
| M13 | |
| M21 | |
| M22 | |
| M23 | |
| M31 | |
| M32 | |
| M33 | |
Definition at line 54 of file matvec3.h.
| Enumerator | |
|---|---|
| UNKNOWN_ORIENTATION_DESCRIPTION | |
| EULER_123 | |
| EULER_313 | |
| EULER_321 | |
| ORIENTATION_VECTOR | |
| ORIENTATION_MATRIX | |
| LAST_ORIENTATION_DESCRIPTION | |
Definition at line 1597 of file matvec3.h.
Definition at line 1014 of file matvec3.cc.
References grad::cos(), and grad::sin().
Referenced by EulerAngles2MatR(), Eu2PhiWrap::Get(), and MBDynParser::GetMatR2vec().
Definition at line 1008 of file matvec3.cc.
References EulerAngles123_2MatR().
Referenced by main().

Definition at line 1039 of file matvec3.cc.
References grad::cos(), and grad::sin().
Referenced by Eu2PhiWrap::Get(), and MBDynParser::GetMatR2vec().
Definition at line 1064 of file matvec3.cc.
References grad::cos(), and grad::sin().
Referenced by Eu2PhiWrap::Get(), and MBDynParser::GetMatR2vec().
| bool IsExactlySame | ( | const T & | t1, |
| const T & | t2 | ||
| ) |
| bool IsExactlySame | ( | const doublereal & | d1, |
| const doublereal & | d2 | ||
| ) |
Definition at line 1131 of file matvec3.cc.
Referenced by ReadStructExtForce().
| bool IsNull | ( | const T & | t | ) |
| bool IsNull | ( | const doublereal & | d | ) |
Definition at line 1124 of file matvec3.cc.
Referenced by LinearViscoElasticGenericCLR< T, Tder >::Read(), and LTVViscoElasticGenericCLR< T, Tder >::Read().
| bool IsSame | ( | const T & | t1, |
| const T & | t2, | ||
| const doublereal & | dTol | ||
| ) |
| bool IsSame | ( | const doublereal & | d1, |
| const doublereal & | d2, | ||
| const doublereal & | dTol | ||
| ) |
Definition at line 1138 of file matvec3.cc.
References grad::fabs().
Referenced by ReferenceFrame::ReferenceFrame().

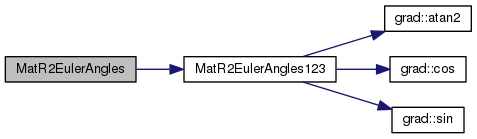
Definition at line 887 of file matvec3.cc.
References MatR2EulerAngles123().
Referenced by Brake::AfterConvergence(), main(), DriveHingeJoint::Output(), UniversalHingeJoint::Output(), Brake::Output(), PinJoint::Output(), UniversalPinJoint::Output(), PlanePinJoint::Output(), Brake::SetValue(), and AxialRotationJoint::SetValue().
Definition at line 893 of file matvec3.cc.
References grad::atan2(), grad::cos(), R, and grad::sin().
Referenced by StructNode::dGetPrivData(), MatR2EulerAngles(), ReferenceFrame::Output(), GimbalRotationJoint::Output(), SphericalHingeJoint::Output(), DeformableHingeJoint::Output(), DeformableJoint::Output(), StructExtForce::Output(), PlaneHingeJoint::Output(), UniversalRotationJoint::Output(), Beam2::Output(), PlaneRotationJoint::Output(), Beam::Output(), AxialRotationJoint::Output(), StructNode::Output(), Aerodynamic2DElem< iNN >::Output_int(), DeformableHingeJoint::OutputInv(), ReadStructExtForce(), ReadStructMappingExtForce(), ReadStructNode(), StructExtForce::SendToFileDes(), StructMappingExtForce::SendToFileDes(), StructMembraneMappingExtForce::SendToFileDes(), StructExtForce::SendToStream(), StructMappingExtForce::SendToStream(), and StructMembraneMappingExtForce::SendToStream().

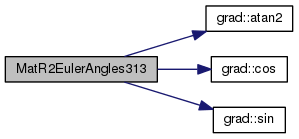
Definition at line 927 of file matvec3.cc.
References grad::atan2(), grad::cos(), R, and grad::sin().
Referenced by StructNode::dGetPrivData(), ReferenceFrame::Output(), GimbalRotationJoint::Output(), SphericalHingeJoint::Output(), DeformableHingeJoint::Output(), DeformableJoint::Output(), PlaneHingeJoint::Output(), UniversalRotationJoint::Output(), Beam2::Output(), PlaneRotationJoint::Output(), Beam::Output(), AxialRotationJoint::Output(), StructNode::Output(), Aerodynamic2DElem< iNN >::Output_int(), DeformableHingeJoint::OutputInv(), and ReadStructNode().
Definition at line 941 of file matvec3.cc.
References grad::atan2(), grad::cos(), R, and grad::sin().
Referenced by StructNode::dGetPrivData(), ReferenceFrame::Output(), GimbalRotationJoint::Output(), SphericalHingeJoint::Output(), DeformableHingeJoint::Output(), DeformableJoint::Output(), PlaneHingeJoint::Output(), UniversalRotationJoint::Output(), Beam2::Output(), PlaneRotationJoint::Output(), Beam::Output(), AxialRotationJoint::Output(), StructNode::Output(), Aerodynamic2DElem< iNN >::Output_int(), DeformableHingeJoint::OutputInv(), and ReadStructNode().

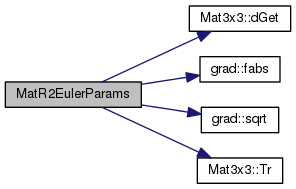
| void MatR2EulerParams | ( | const Mat3x3 & | R, |
| doublereal & | e0, | ||
| Vec3 & | e | ||
| ) |
Definition at line 954 of file matvec3.cc.
References Mat3x3::dGet(), grad::fabs(), grad::sqrt(), and Mat3x3::Tr().
Referenced by StructNode::dGetPrivData(), and main().
Definition at line 756 of file matvec3.cc.
References Mat3x3::Ax(), grad::fabs(), MBDYN_EXCEPT_ARGS, and Mat3x3::Trace().
Referenced by HBeam::Omega0().

Definition at line 772 of file matvec3.cc.
References Mat3x3::Ax().
Referenced by ModalMappingExt::Send().

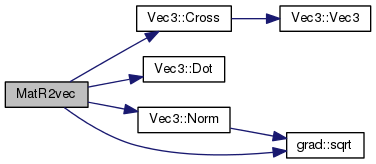
Definition at line 779 of file matvec3.cc.
References ASSERT, Vec3::Cross(), DEBUGCOUT, Vec3::Dot(), MBDYN_EXCEPT_ARGS, Vec3::Norm(), grad::sqrt(), and Zero3x3.
Referenced by MBDynParser::GetMatR2vec(), and main().
|
inline |
|
inline |
|
inline |
Definition at line 1584 of file matvec3.h.
Referenced by Shell4EASANS::AssRes(), Beam2::AssStiffnessMat(), Beam::AssStiffnessMat(), ViscoElasticBeam2::AssStiffnessMat(), ViscoElasticBeam::AssStiffnessMat(), and mb_deye< Mat6x6 >().
|
inline |
Definition at line 1590 of file matvec3.h.
References Mat3x3DEye_Manip::Manipulate().

|
inline |
Definition at line 1554 of file matvec3.h.
References Zero1.
Referenced by InverseSquareElasticCLR::Read().
Definition at line 1560 of file matvec3.h.
References Zero3.
Referenced by DataManager::OutputEigGeometry().
Definition at line 1156 of file matvec3.cc.
References Mat3x3::MulMT().

Definition at line 1150 of file matvec3.cc.
Definition at line 1162 of file matvec3.cc.
References Mat3x3::MulMT().
Referenced by ViscousBody::AfterPredict(), HBeam::AfterPredict(), Beam2::AfterPredict(), Beam::AfterPredict(), ViscoElasticBeam2::AfterPredict(), ViscousJoint::AfterPredict(), ViscoElasticJoint::AfterPredict(), ViscoElasticBeam::AfterPredict(), AerodynamicBody::AssJac(), AerodynamicBeam::AssJac(), AerodynamicBeam2::AssJac(), HBeam::AssStiffnessMat(), Beam2::DsDxi(), Beam::DsDxi(), ElasticJoint::ElasticJoint(), ElasticJointInv::ElasticJointInv(), ViscoElasticBeam::Init(), HBeam::SetValue(), Beam2::SetValue(), Beam::SetValue(), ViscoElasticBeam2::SetValue(), ViscoElasticBeam::SetValue(), ViscoElasticBeam2::ViscoElasticBeam2(), ViscoElasticJoint::ViscoElasticJoint(), ViscousBody::ViscousBody(), and ViscousJoint::ViscousJoint().

Definition at line 1144 of file matvec3.cc.
Referenced by HBeam::AfterPredict(), Beam2::AfterPredict(), Beam::AfterPredict(), ViscoElasticBeam2::AfterPredict(), ViscoElasticBeam::AfterPredict(), Beam2::AssStiffnessVec(), HBeam::AssStiffnessVec(), Beam::AssStiffnessVec(), ViscoElasticBeam2::AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), ViscousBody::AssVec(), ElasticJoint::AssVec(), ElasticJointInv::AssVec(), ViscousJoint::AssVec(), and ViscoElasticJoint::AssVec().
Definition at line 651 of file matvec3.cc.
References Vec3::pdVec, V1, V2, and V3.
Definition at line 659 of file matvec3.cc.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, and Mat3x3::pGetMat().

| std::ostream& operator<< | ( | std::ostream & | out, |
| const Vec3 & | v | ||
| ) |
Definition at line 703 of file matvec3.cc.
References Vec3::pGetVec().

| std::ostream& operator<< | ( | std::ostream & | out, |
| const Mat3x3 & | m | ||
| ) |
Definition at line 680 of file matvec3.cc.
References M11, M12, M13, M21, M22, M23, M31, M32, M33, and Mat3x3::pGetMat().

Definition at line 1089 of file matvec3.cc.
References M_PI, and Vec3::Norm().
Referenced by TotalEquation::AfterConvergence(), TotalJoint::AfterConvergence(), TotalReaction::AfterConvergence(), TotalPinJoint::AfterConvergence(), TotalEquation::dGetPrivData(), TotalJoint::dGetPrivData(), TotalReaction::dGetPrivData(), and TotalPinJoint::dGetPrivData().

| std::ostream& Write | ( | std::ostream & | out, |
| const doublereal & | d, | ||
| const char * | |||
| ) |
Definition at line 747 of file matvec3.cc.
| std::ostream& Write | ( | std::ostream & | out, |
| const Vec3 & | v, | ||
| const char * | s = " " |
||
| ) |
Definition at line 714 of file matvec3.cc.
References Vec3::Write().

| std::ostream& Write | ( | std::ostream & | out, |
| const Mat3x3 & | m, | ||
| const char * | s = " ", |
||
| const char * | s2 = NULL |
||
| ) |
Definition at line 694 of file matvec3.cc.
References Mat3x3::Write().

| const doublereal dRaDegr |
Definition at line 884 of file matvec3.cc.
Referenced by main(), ReferenceFrame::Output(), GimbalRotationJoint::Output(), DriveHingeJoint::Output(), UniversalHingeJoint::Output(), SphericalHingeJoint::Output(), DeformableHingeJoint::Output(), DeformableJoint::Output(), StructExtForce::Output(), Brake::Output(), PlaneHingeJoint::Output(), UniversalRotationJoint::Output(), PinJoint::Output(), Beam2::Output(), UniversalPinJoint::Output(), PlaneRotationJoint::Output(), Beam::Output(), AxialRotationJoint::Output(), PlanePinJoint::Output(), StructNode::Output(), Aerodynamic2DElem< iNN >::Output_int(), DeformableHingeJoint::OutputInv(), ReadStructExtForce(), ReadStructMappingExtForce(), ReadStructNode(), StructExtForce::SendToFileDes(), StructMappingExtForce::SendToFileDes(), StructMembraneMappingExtForce::SendToFileDes(), StructExtForce::SendToStream(), StructMappingExtForce::SendToStream(), and StructMembraneMappingExtForce::SendToStream().
| const Mat3x3 Eye3 |
Referenced by AeroDynModule::AeroDynModule(), ElasticHingeJointInv::AfterPredict(), ViscousHingeJointInv::AfterPredict(), ViscoElasticHingeJointInv::AfterPredict(), HydrodynamicPlainBearing::AssJac(), AerodynamicBeam::AssJac(), ElasticDispJointInv::AssVec(), ElasticJointInv::AssVec(), Inertia::Collect_int(), ComputeFullInterpolation(), Shell4EAS::ComputeInitialNodeAndIptOrientation(), Shell4EASANS::ComputeInitialNodeOrientation(), Mat3x3::EigSym(), MBDynParser::GetMat3x3(), MBDynParser::GetMat3x3Sym(), MBDynParser::GetMatR2vec(), StructDispNode::GetR(), Inertia::Inertia(), MatManip_test(), ModuleNonsmoothNode::mbs_get_force(), ModuleNonsmoothNode::mbs_get_force_frictional(), StructDispNode::Output(), ScalarFuncGR::Read(), PowerLawGR::Read(), LogarithmicGR::Read(), ReadAircraftInstruments(), ReadBeam(), ReadBeam2(), DataManager::ReadControl(), ReadElectric(), ReadForce(), ReadGenericAerodynamicForce(), ReadModal(), DataManager::ReadOneElem(), ReadRotor(), ReadRotorData(), ReadShell4EAS(), ReadShell4EASANS(), ReadStructMappingExtForce(), ReadStructNode(), ReferenceFrame::ReferenceFrame(), ModalMappingExt::Send(), and ModalExt::Send().
| const Mat3x3DEye_Manip Mat3x3DEye |
| const Mat3x3Diag_Manip Mat3x3Diag |
Definition at line 638 of file matvec3.cc.
| const Mat3x3Zero_Manip Mat3x3Zero |
Definition at line 636 of file matvec3.cc.
| const MatCross_Manip MatCross |
Definition at line 639 of file matvec3.cc.
Referenced by HydrodynamicPlainBearing::AssJac(), InlineFriction::AssJac(), UniversalHingeJoint::AssJac(), Actuator::AssJac(), asynchronous_machine::AssJac(), RodBezier::AssJac(), Motor::AssJac(), PlaneHingeJoint::AssJac(), BeamSliderJoint::AssJac(), TotalEquation::AssJac(), TotalJoint::AssJac(), UniversalPinJoint::AssJac(), AerodynamicBody::AssJac(), Modal::AssJac(), RodWithOffset::AssJac(), FollowerForce::AssJac(), TotalReaction::AssJac(), Shell4EAS::AssJac(), ModuleIMUConstraint::AssJac(), AerodynamicBeam::AssJac(), FollowerCouple::AssJac(), AxialRotationJoint::AssJac(), AerodynamicBeam2::AssJac(), TotalForce::AssJac(), LoadIncForce::AssJac(), FollowerInternalForce::AssJac(), FollowerInternalCouple::AssJac(), GimbalRotationJoint::AssMat(), DriveDisplacementJoint::AssMat(), DriveHingeJoint::AssMat(), DriveDisplacementPinJoint::AssMat(), DeformableJoint::AssMatCommon(), DeformableJoint::AssMatElastic(), DeformableDispJoint::AssMatF(), DeformableDispJoint::AssMatFDE(), DeformableDispJoint::AssMatFDEPrime(), DeformableAxialJoint::AssMatM(), DeformableHingeJoint::AssMatM(), DeformableAxialJoint::AssMatMDEPrime(), DeformableHingeJoint::AssMatMDEPrime(), ViscousBody::AssMats(), DynamicVariableBody::AssMats(), DynamicBody::AssMats(), ModalBody::AssMats(), Mass::AssMatsRBK_int(), VariableBody::AssMatsRBK_int(), Body::AssMatsRBK_int(), DeformableJoint::AssMatViscous(), Shell4EAS::AssRes(), Shell4EASANS::AssRes(), PiezoActuatorBeam::AssStiffnessMat(), PiezoActuatorBeam2::AssStiffnessMat(), Beam2::AssStiffnessMat(), HBeam::AssStiffnessMat(), PiezoActuatorVEBeam2::AssStiffnessMat(), PiezoActuatorVEBeam::AssStiffnessMat(), Beam::AssStiffnessMat(), ViscoElasticBeam2::AssStiffnessMat(), ViscoElasticBeam::AssStiffnessMat(), ComputeFullInterpolation(), VecExp::Cross(), RotManip::Elle(), Modal::GetCurrFEMNodesVelocity(), InlineFriction::InitialAssJac(), InLineJoint::InitialAssJac(), UniversalHingeJoint::InitialAssJac(), InPlaneJoint::InitialAssJac(), PrismaticJoint::InitialAssJac(), SphericalHingeJoint::InitialAssJac(), RodBezier::InitialAssJac(), DriveDisplacementJoint::InitialAssJac(), DriveHingeJoint::InitialAssJac(), PlaneHingeJoint::InitialAssJac(), DynamicVariableBody::InitialAssJac(), InLineWithOffsetJoint::InitialAssJac(), DistanceJointWithOffset::InitialAssJac(), UniversalRotationJoint::InitialAssJac(), PinJoint::InitialAssJac(), InPlaneWithOffsetJoint::InitialAssJac(), TotalJoint::InitialAssJac(), AbsoluteForce::InitialAssJac(), DriveDisplacementPinJoint::InitialAssJac(), UniversalPinJoint::InitialAssJac(), PlaneRotationJoint::InitialAssJac(), Modal::InitialAssJac(), RodWithOffset::InitialAssJac(), FollowerForce::InitialAssJac(), ViscousAxialJoint::InitialAssJac(), TotalReaction::InitialAssJac(), DynamicBody::InitialAssJac(), FollowerCouple::InitialAssJac(), ViscousHingeJoint::InitialAssJac(), ViscousDispJoint::InitialAssJac(), ViscoElasticAxialJoint::InitialAssJac(), AxialRotationJoint::InitialAssJac(), AbsoluteInternalForce::InitialAssJac(), TotalForce::InitialAssJac(), ViscoElasticDispJoint::InitialAssJac(), PlanePinJoint::InitialAssJac(), FollowerInternalForce::InitialAssJac(), ViscoElasticHingeJoint::InitialAssJac(), FollowerInternalCouple::InitialAssJac(), Modal::InitialAssRes(), MatExp::MatExp(), MultMatVCross(), MultMatVCrossT(), ReadModal(), Mat3x3::Skew(), testMatVec3(), and InvAngularConstitutiveLaw::Update().
| const MatCrossCross_Manip MatCrossCross |
Definition at line 640 of file matvec3.cc.
Referenced by VariableBody::AfterPredict(), InLineJoint::AssJac(), InlineFriction::AssJac(), UniversalHingeJoint::AssJac(), PrismaticJoint::AssJac(), SphericalHingeJoint::AssJac(), InPlaneJoint::AssJac(), RodBezier::AssJac(), Brake::AssJac(), PlaneHingeJoint::AssJac(), BeamSliderJoint::AssJac(), InLineWithOffsetJoint::AssJac(), TotalEquation::AssJac(), TotalJoint::AssJac(), DistanceJointWithOffset::AssJac(), UniversalRotationJoint::AssJac(), PinJoint::AssJac(), InPlaneWithOffsetJoint::AssJac(), ViscoElasticRod::AssJac(), AbsoluteForce::AssJac(), UniversalPinJoint::AssJac(), PlaneRotationJoint::AssJac(), Modal::AssJac(), RodWithOffset::AssJac(), TotalReaction::AssJac(), TotalPinJoint::AssJac(), AerodynamicBeam::AssJac(), AxialRotationJoint::AssJac(), AerodynamicBeam2::AssJac(), AbsoluteInternalForce::AssJac(), TotalForce::AssJac(), LoadIncForce::AssJac(), FollowerInternalForce::AssJac(), PlanePinJoint::AssJac(), DriveDisplacementJoint::AssMat(), Rod::AssMat(), DriveDisplacementPinJoint::AssMat(), DeformableJoint::AssMatCommon(), DeformableDispJoint::AssMatF(), DeformableDispJoint::AssMatFDEPrime(), DynamicVariableBody::AssMats(), StaticVariableBody::AssMats(), DynamicBody::AssMats(), ModalBody::AssMats(), StaticBody::AssMats(), Mass::AssMatsRBK_int(), VariableBody::AssMatsRBK_int(), Body::AssMatsRBK_int(), DeformableJoint::AssMatViscous(), DynamicVariableBody::AssRes(), StaticVariableBody::AssRes(), Beam2::AssStiffnessMat(), Beam::AssStiffnessMat(), ViscoElasticBeam2::AssStiffnessMat(), ViscoElasticBeam::AssStiffnessMat(), CenterOfMass::Collect_int(), Inertia::Collect_int(), AutomaticStructElem::ComputeAccelerations(), Body::dGetPrivData(), RotManip::DRot(), RotManip::DRot_I(), RotManip::DRot_IT(), RotManip::Elle(), Mass::GetJ_int(), VariableBody::GetJ_int(), Modal::GetJ_int(), Body::GetJ_int(), InlineFriction::InitialAssJac(), InLineJoint::InitialAssJac(), UniversalHingeJoint::InitialAssJac(), InPlaneJoint::InitialAssJac(), PrismaticJoint::InitialAssJac(), SphericalHingeJoint::InitialAssJac(), RodBezier::InitialAssJac(), DriveDisplacementJoint::InitialAssJac(), PlaneHingeJoint::InitialAssJac(), DynamicVariableBody::InitialAssJac(), InLineWithOffsetJoint::InitialAssJac(), DistanceJointWithOffset::InitialAssJac(), UniversalRotationJoint::InitialAssJac(), PinJoint::InitialAssJac(), InPlaneWithOffsetJoint::InitialAssJac(), TotalJoint::InitialAssJac(), ViscoElasticRod::InitialAssJac(), AbsoluteForce::InitialAssJac(), DriveDisplacementPinJoint::InitialAssJac(), UniversalPinJoint::InitialAssJac(), PlaneRotationJoint::InitialAssJac(), Modal::InitialAssJac(), RodWithOffset::InitialAssJac(), FollowerForce::InitialAssJac(), TotalReaction::InitialAssJac(), DynamicBody::InitialAssJac(), TotalPinJoint::InitialAssJac(), FollowerCouple::InitialAssJac(), AxialRotationJoint::InitialAssJac(), AbsoluteInternalForce::InitialAssJac(), TotalForce::InitialAssJac(), PlanePinJoint::InitialAssJac(), FollowerInternalForce::InitialAssJac(), FollowerInternalCouple::InitialAssJac(), DynamicVariableBody::InitialAssRes(), MatExp::MatExp(), Inertia::Output_int(), ReadBody(), ReadModal(), Body::Restart(), RotManip::Rot(), RotManip::RotAndDRot(), RotManip::RotAndDRot_IT(), DynamicVariableBody::SetValue(), and testMatVec3().
| const doublereal Zero1 |
Referenced by SchurMatrixHandler::dGetCoef(), SpMapMatrixHandler::dGetCoef(), SchurVectorHandler::dGetCoef(), SchurMatrixHandlerUm::dGetCoef(), NonlinearSolverTestRange::dScaleCoef(), mb_zero< doublereal >(), DirCColMatrixHandler< off >::operator()(), CColMatrixHandler< off >::operator()(), SchurMatrixHandler::operator()(), NaiveMatrixHandler::operator()(), SpMapMatrixHandler::operator()(), and SchurVectorHandler::operator()().
| const Vec3 Zero3 |
Referenced by AeroDynModule::AeroDynModule(), ModuleNonsmoothNode::AfterConvergence(), ViscousHingeJoint::AfterConvergence(), ViscousDispJoint::AfterConvergence(), CyclocopterUniform1D::AfterConvergence(), CyclocopterUniform2D::AfterConvergence(), StructNode::AfterConvergence(), CyclocopterPolimi::AfterConvergence(), ViscousHingeJoint::AfterPredict(), ViscousDispJoint::AfterPredict(), ViscousHingeJointInv::AfterPredict(), StructNode::AfterPredict(), HydrodynamicPlainBearing::AssJac(), RodBezier::AssJac(), PlaneHingeJoint::AssJac(), BeamSliderJoint::AssJac(), AerodynamicModal::AssJac(), AerodynamicBody::AssJac(), Modal::AssJac(), AerodynamicBeam::AssJac(), AerodynamicBeam2::AssJac(), StaticMass::AssMats(), StaticVariableBody::AssMats(), StaticBody::AssMats(), ModalForce::AssRes(), Wheel2::AssRes(), StructExtForce::AssRes(), StructMappingExtForce::AssRes(), Brake::AssRes(), BeamSliderJoint::AssRes(), AeroDynModule::AssRes(), StaticMass::AssRes(), StaticVariableBody::AssRes(), AutomaticStructElem::AssRes(), Modal::AssRes(), Shell4EAS::AssRes(), Shell4EASANS::AssRes(), StaticBody::AssRes(), CyclocopterUniform2D::AssRes(), CyclocopterPolimi::AssRes(), GenericAerodynamicForce::AssVec(), AerodynamicModal::AssVec(), AerodynamicBody::AssVec(), ViscousHingeJoint::AssVec(), AerodynamicBeam::AssVec(), ViscousDispJoint::AssVec(), AerodynamicBeam2::AssVec(), ViscousHingeJointInv::AssVec(), Beam2::Beam2(), StructNode::BeforePredict(), CenterOfMass::Collect_int(), Inertia::Collect_int(), AutomaticStructDispElem::ComputeAccelerations(), AutomaticStructElem::ComputeAccelerations(), Shell4EAS::ComputeIPCurvature(), Shell4EASANS::ComputeIPCurvature(), ContactConstitutiveLaw< Vec3, Mat3x3 >::ContactConstitutiveLaw(), Modal::dGetPrivData(), DrivenElem::GetB_int(), Modal::GetB_int(), NestedElem::GetB_int(), ElemGravityOwner::GetB_int(), Modal::GetCurrFEMNodesVelocity(), RotorTrimGeneric::GetData(), DrivenElem::GetG_int(), Modal::GetG_int(), NestedElem::GetG_int(), ElemGravityOwner::GetG_int(), AutomaticStructDispElem::GetGCurr(), NoRotor::GetInducedVelocity(), CyclocopterNoInflow::GetInducedVelocity(), GlauertRotor::GetInducedVelocity(), ManglerRotor::GetInducedVelocity(), MBDynParser::GetMatR2vec(), AutomaticStructDispElem::GetS(), DrivenElem::GetS(), NestedElem::GetS(), DrivenElem::GetS_int(), ElemGravityOwner::GetS_int(), NestedElem::GetS_int(), MBDynParser::GetVec3(), Gust::GetVelocity(), StructDispNode::GetW(), StructDispNode::GetWP(), HBeam::HBeam(), Beam::Init(), ViscoElasticBeam::Init(), RodBezier::InitialAssJac(), TotalJoint::InitialAssJac(), Modal::InitialAssJac(), TotalReaction::InitialAssJac(), TotalPinJoint::InitialAssJac(), AerodynamicModal::InitialAssRes(), TotalJoint::InitialAssRes(), Modal::InitialAssRes(), TotalReaction::InitialAssRes(), TotalPinJoint::InitialAssRes(), ViscousHingeJoint::InitialAssRes(), Rotor::InitParam(), LoadIncForce::LoadIncForce(), mb_zero< Vec3 >(), ModuleNonsmoothNode::mbs_get_force(), ModuleNonsmoothNode::mbs_get_force_frictional(), ModalMappingExt::ModalMappingExt(), ModuleIMUConstraint::ModuleIMUConstraint(), ModuleNonsmoothNode::ModuleNonsmoothNode(), GimbalRotationJoint::Output(), LinearAccelerationJoint::Output(), DriveDisplacementJoint::Output(), DriveHingeJoint::Output(), LinearVelocityJoint::Output(), InLineJoint::Output(), DistanceJoint::Output(), PrismaticJoint::Output(), SphericalHingeJoint::Output(), DeformableAxialJoint::Output(), InPlaneJoint::Output(), DeformableDispJoint::Output(), RodBezier::Output(), DeformableHingeJoint::Output(), Rod::Output(), Brake::Output(), AutomaticStructDispElem::Output(), AngularAccelerationJoint::Output(), AirProperties::Output(), AngularVelocityJoint::Output(), InLineWithOffsetJoint::Output(), ContactJoint::Output(), DistanceJointWithOffset::Output(), UniversalRotationJoint::Output(), PinJoint::Output(), TotalEquation::Output(), InPlaneWithOffsetJoint::Output(), DriveDisplacementPinJoint::Output(), StructDispNode::Output(), PlaneRotationJoint::Output(), DeformableHingeJoint::OutputInv(), ScalarFuncGR::Read(), NodeDistDCR::Read(), PowerLawGR::Read(), LogarithmicGR::Read(), ReadBeam(), ReadBody(), DataManager::ReadControl(), ReadElectric(), ReadForce(), ReadGenericAerodynamicForce(), ReadGravity(), ReadJoint(), ReadModal(), DataManager::ReadOneElem(), ReadStructExtForce(), ReadStructMappingExtForce(), ReadStructNode(), ReadStructuralForce(), ModalMappingExt::Recv(), StructMappingExtForce::RecvFromFileDes(), StructMembraneMappingExtForce::RecvFromFileDes(), MBDynParser::Reference_int(), ResForces::Reset(), ModalMappingExt::Send(), ModalExt::Send(), StructNode::SetInitialValue(), StructNode::SetValue(), StructExtForce::StructExtForce(), StructMappingExtForce::StructMappingExtForce(), AircraftInstruments::Update(), ContContact3DCL::Update(), and ViscoElasticBeam2::ViscoElasticBeam2().
| const Mat3x3 Zero3x3 |
Referenced by Modal::AssJac(), AutomaticStructElem::AssRes(), Modal::AssRes(), Beam2::AssStiffnessMat(), HBeam::AssStiffnessMat(), Beam::AssStiffnessMat(), ViscoElasticBeam2::AssStiffnessMat(), ViscoElasticBeam::AssStiffnessMat(), CenterOfMass::Collect_int(), ContactConstitutiveLaw< Vec3, Mat3x3 >::ContactConstitutiveLaw(), AutomaticStructDispElem::GetJ(), DrivenElem::GetJ(), NestedElem::GetJ(), DrivenElem::GetJ_int(), ElemGravityOwner::GetJ_int(), NestedElem::GetJ_int(), MBDynParser::GetMat3x3(), MBDynParser::GetMat3x3Sym(), CyclocopterNoInflow::GetRRotor(), CyclocopterUniform1D::GetRRotor(), CyclocopterUniform2D::GetRRotor(), CyclocopterPolimi::GetRRotor(), MatR2vec(), mb_deye< Mat6x6 >(), mb_zero< Mat3x3 >(), ReadBody(), ReadElectric(), ReadModal(), MBDynParser::Reference_int(), ContContact3DCL::Update(), Shell4EAS::UpdateNodalAndAveragePosAndOrientation(), and Shell4EASANS::UpdateNodalAndAveragePosAndOrientation().
 1.8.7
1.8.7 
