|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
#include "mbconfig.h"#include <cerrno>#include <cstring>#include <sstream>#include "mynewmem.h"#include "strnode.h"#include "body.h"#include "autostr.h"#include "dataman.h"#include "matvecexp.h"#include "Rot.hh"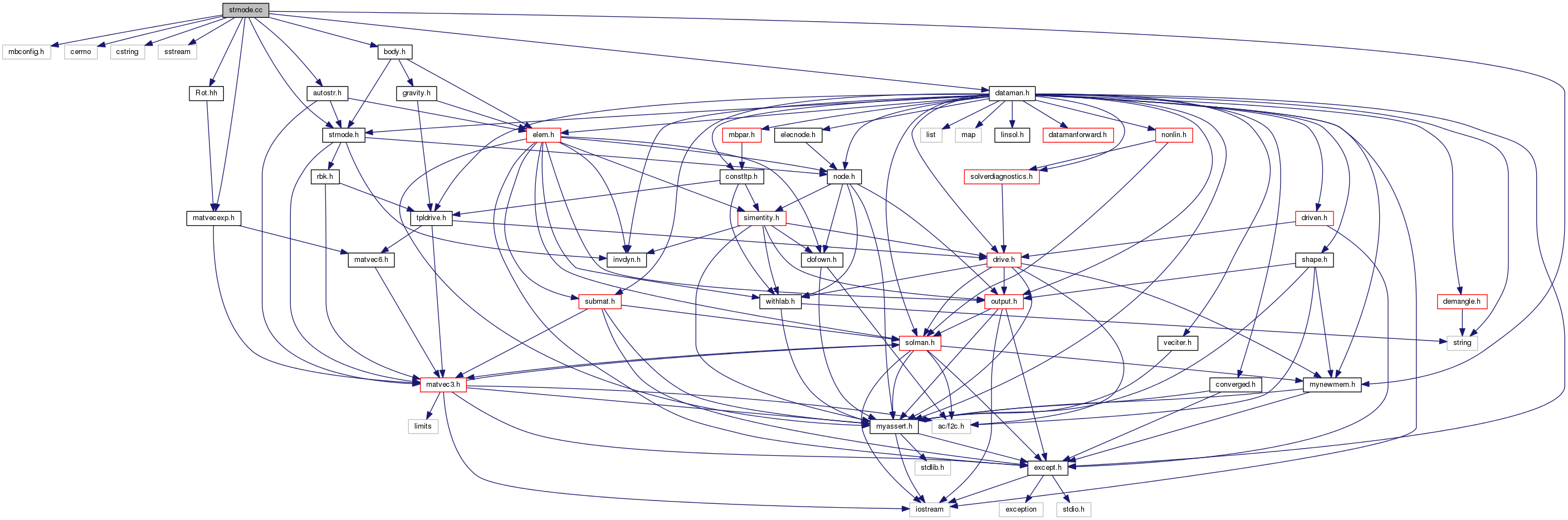
Go to the source code of this file.
Functions | |
| Node * | ReadStructNode (DataManager *pDM, MBDynParser &HP, DofOwner *pDO, unsigned int uLabel) |
Variables | |
| static const char | xyz [] = "xyz" |
| static const char * | sdn_dof [] |
| static const char * | sdn_eq [] |
| static const char * | sdn_initial_dof [] |
| static const char * | sdn_initial_eq [] |
| static const char * | sn_dof [] |
| static const char * | sn_eq [] |
| static const char * | sn_modal_eq [] |
| static const char * | sn_initial_dof [] |
| static const char * | sn_initial_eq [] |
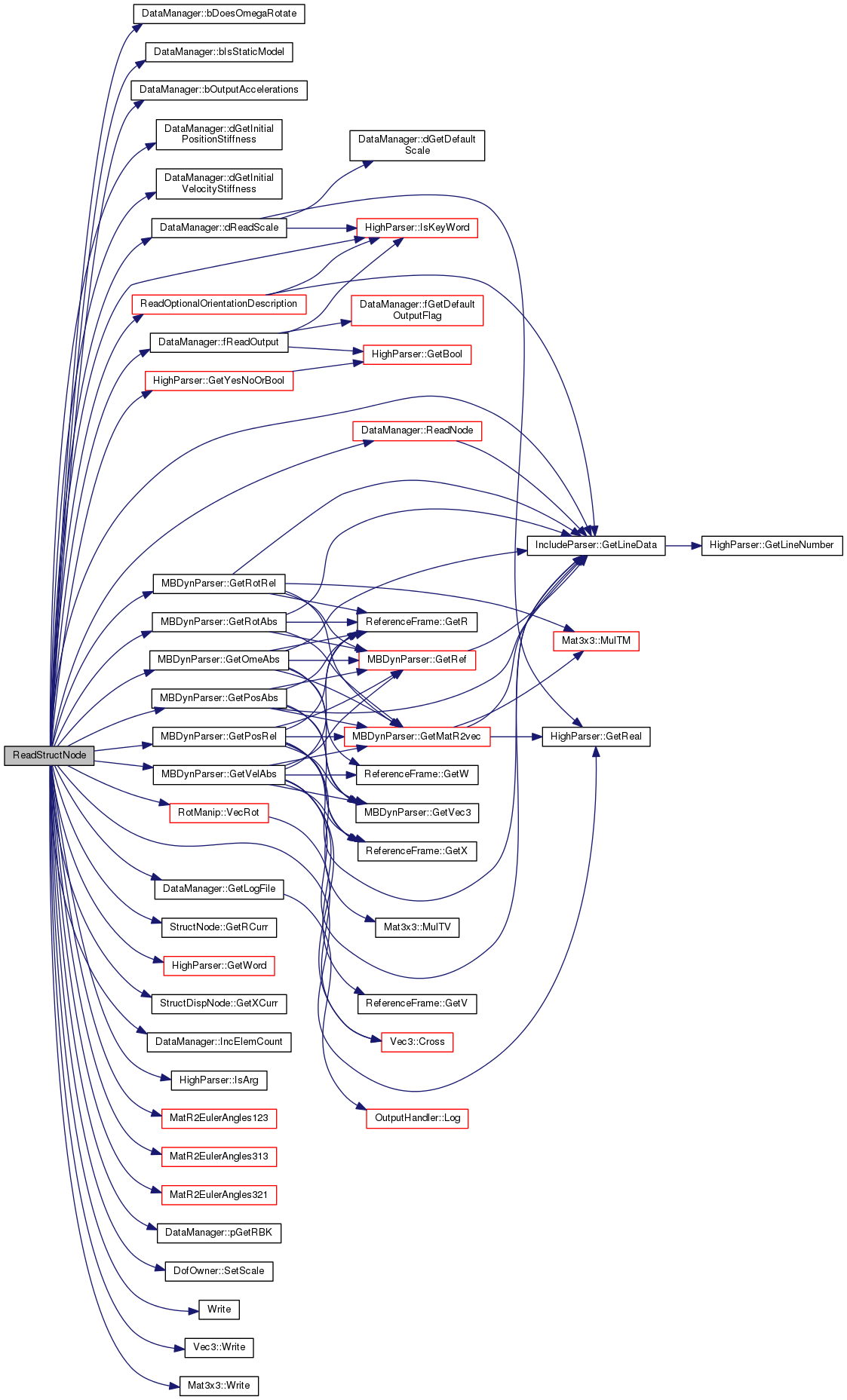
| Node* ReadStructNode | ( | DataManager * | pDM, |
| MBDynParser & | HP, | ||
| DofOwner * | pDO, | ||
| unsigned int | uLabel | ||
| ) |
Definition at line 3978 of file strnode.cc.
References AbsRefFrame, ASSERT, Elem::AUTOMATICSTRUCTURAL, DataManager::bDoesOmegaRotate(), DataManager::bIsStaticModel(), DataManager::bOutputAccelerations(), DEBUGCOUT, DataManager::dGetInitialPositionStiffness(), DataManager::dGetInitialVelocityStiffness(), dRaDegr, DataManager::dReadScale(), EULER_123, EULER_313, EULER_321, Eye3, DataManager::fReadOutput(), IncludeParser::GetLineData(), DataManager::GetLogFile(), MBDynParser::GetOmeAbs(), MBDynParser::GetPosAbs(), MBDynParser::GetPosRel(), StructNode::GetRCurr(), HighParser::GetReal(), MBDynParser::GetRotAbs(), MBDynParser::GetRotRel(), MBDynParser::GetVelAbs(), HighParser::GetWord(), StructDispNode::GetXCurr(), HighParser::GetYesNoOrBool(), DataManager::IncElemCount(), HighParser::IsArg(), HighParser::IsKeyWord(), LASTKEYWORD, MatR2EulerAngles123(), MatR2EulerAngles313(), MatR2EulerAngles321(), MBDYN_EXCEPT_ARGS, ORIENTATION_MATRIX, ORIENTATION_VECTOR, StructDispNode::OUTPUT_ACCELERATIONS, StructDispNode::OUTPUT_INERTIA, DataManager::pGetRBK(), R, DataManager::ReadNode(), ReadOptionalOrientationDescription(), MBDynParser::RF, SAFENEWWITHCONSTRUCTOR, DofOwner::SetScale(), Node::STRUCTURAL, DofOwner::STRUCTURALNODE, HighParser::UNKNOWN, UNKNOWN_ORIENTATION_DESCRIPTION, RotManip::VecRot(), Write(), Vec3::Write(), Mat3x3::Write(), and Zero3.
Referenced by DataManager::ReadNodes().
|
static |
Definition at line 49 of file strnode.cc.
Referenced by DynamicStructDispNode::DescribeDof().
|
static |
Definition at line 53 of file strnode.cc.
Referenced by StructDispNode::DescribeEq(), and DynamicStructDispNode::DescribeEq().
|
static |
Definition at line 57 of file strnode.cc.
Referenced by StructDispNode::DescribeDof().
|
static |
Definition at line 61 of file strnode.cc.
Referenced by StructDispNode::DescribeEq().
|
static |
Definition at line 66 of file strnode.cc.
Referenced by DynamicStructNode::DescribeDof().
|
static |
Definition at line 72 of file strnode.cc.
Referenced by StructNode::DescribeEq(), and DynamicStructNode::DescribeEq().
|
static |
Definition at line 84 of file strnode.cc.
Referenced by StructNode::DescribeDof(), and ModalNode::DescribeDof().
|
static |
Definition at line 90 of file strnode.cc.
Referenced by StructNode::DescribeEq(), and ModalNode::DescribeEq().
|
static |
Definition at line 78 of file strnode.cc.
Referenced by ModalNode::DescribeEq().
|
static |
Definition at line 47 of file strnode.cc.
Referenced by StructDispNode::DescribeDof(), DynamicStructDispNode::DescribeDof(), StructNode::DescribeDof(), DynamicStructNode::DescribeDof(), ModalNode::DescribeDof(), StructDispNode::DescribeEq(), DynamicStructDispNode::DescribeEq(), StructNode::DescribeEq(), DynamicStructNode::DescribeEq(), and ModalNode::DescribeEq().
 1.8.7
1.8.7 
