|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
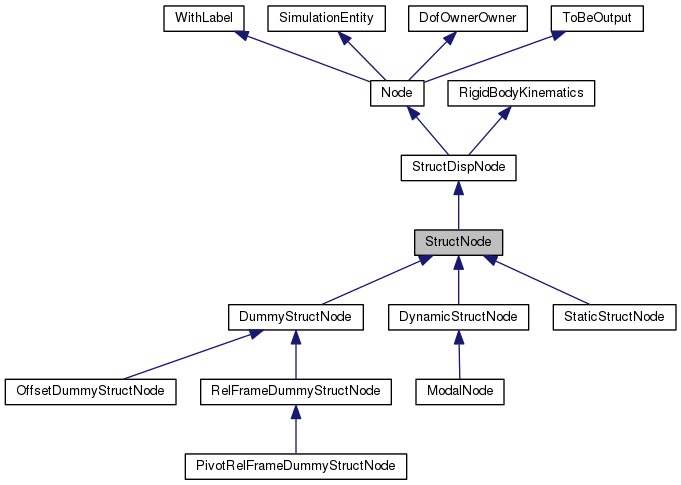
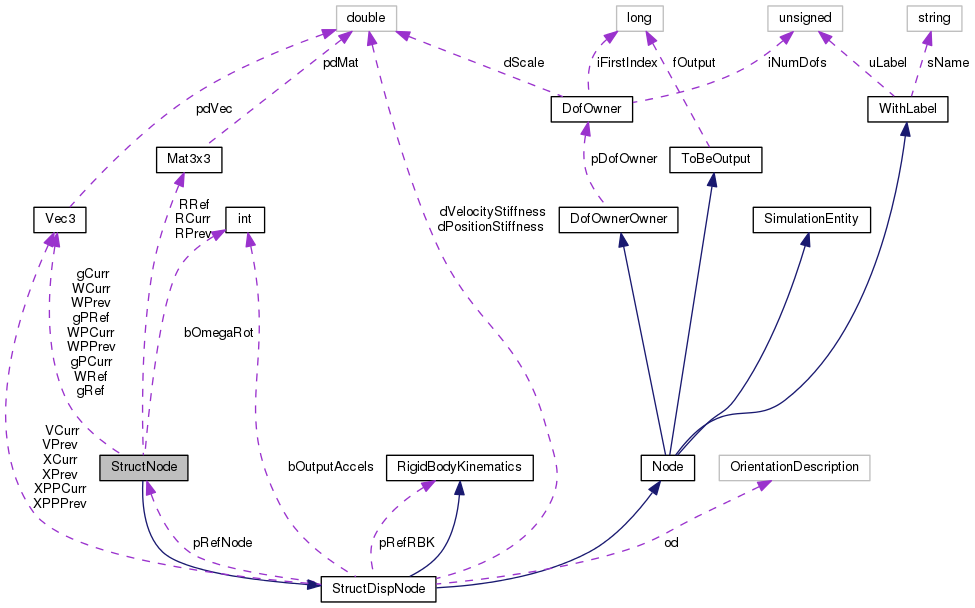
#include <strnode.h>
Classes | |
| class | ErrGeneric |
Public Types | |
| enum | Type { UNKNOWN = -1, DYNAMIC = 0, STATIC, MODAL, DUMMY, LASTSTRUCTNODETYPE } |
 Public Types inherited from StructDispNode Public Types inherited from StructDispNode | |
| enum | Type { UNKNOWN = -1, DYNAMIC = 0, STATIC, LASTSTRUCTDISPNODETYPE } |
| enum | Output { OUTPUT_ACCELERATIONS = (ToBeOutput::OUTPUT_PRIVATE << 0), OUTPUT_INERTIA = (ToBeOutput::OUTPUT_PRIVATE << 1) } |
| Public Types inherited from Node | |
| enum | Type { UNKNOWN = -1, ABSTRACT = 0, STRUCTURAL, ELECTRIC, THERMAL, PARAMETER, HYDRAULIC, LASTNODETYPE } |
| Public Types inherited from SimulationEntity | |
| typedef std::vector< Hint * > | Hints |
| Public Types inherited from ToBeOutput | |
| enum | { OUTPUT = 0x1U, OUTPUT_MASK = 0xFU, OUTPUT_PRIVATE = 0x10U, OUTPUT_PRIVATE_MASK = ~OUTPUT_MASK } |
Public Member Functions | |
| StructNode (unsigned int uL, const DofOwner *pDO, const Vec3 &X0, const Mat3x3 &R0, const Vec3 &V0, const Vec3 &W0, const StructNode *pRN, const RigidBodyKinematics *pRBK, doublereal dPosStiff, doublereal dVelStiff, bool bOmRot, OrientationDescription ood, flag fOut) | |
| virtual | ~StructNode (void) |
| const Mat3x3 & | GetR (void) const |
| const Vec3 & | GetW (void) const |
| const Vec3 & | GetWP (void) const |
| virtual std::ostream & | Restart (std::ostream &out) const |
| virtual std::ostream & | DescribeDof (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeDof (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual std::ostream & | DescribeEq (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeEq (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual StructNode::Type | GetStructNodeType (void) const =0 |
| virtual const doublereal & | dGetDofValue (int iDof, int iOrder=0) const |
| virtual const doublereal & | dGetDofValuePrev (int iDof, int iOrder=0) const |
| virtual void | SetDofValue (const doublereal &dValue, unsigned int iDof, unsigned int iOrder=0) |
| virtual unsigned int | iGetInitialNumDof (void) const |
| virtual const Vec3 & | GetgRef (void) const |
| virtual const Vec3 & | GetgCurr (void) const |
| virtual const Vec3 & | GetgPRef (void) const |
| virtual const Vec3 & | GetgPCurr (void) const |
| virtual const Mat3x3 & | GetRPrev (void) const |
| virtual const Mat3x3 & | GetRRef (void) const |
| virtual const Mat3x3 & | GetRCurr (void) const |
| virtual const Vec3 & | GetWPrev (void) const |
| virtual const Vec3 & | GetWRef (void) const |
| virtual const Vec3 & | GetWCurr (void) const |
| virtual const Vec3 & | GetWPCurr (void) const |
| virtual const Vec3 & | GetWPPrev (void) const |
| virtual bool | bOmegaRotates (void) const |
| virtual void | OutputPrepare (OutputHandler &OH) |
| virtual void | Output (OutputHandler &OH) const |
| virtual void | Update (const VectorHandler &X, const VectorHandler &XP) |
| virtual void | DerivativesUpdate (const VectorHandler &X, const VectorHandler &XP) |
| virtual void | InitialUpdate (const VectorHandler &X) |
| void | Update (const VectorHandler &X, InverseDynamics::Order iOrder) |
| virtual void | SetInitialValue (VectorHandler &X) |
| virtual void | SetValue (DataManager *pDM, VectorHandler &X, VectorHandler &XP, SimulationEntity::Hints *ph=0) |
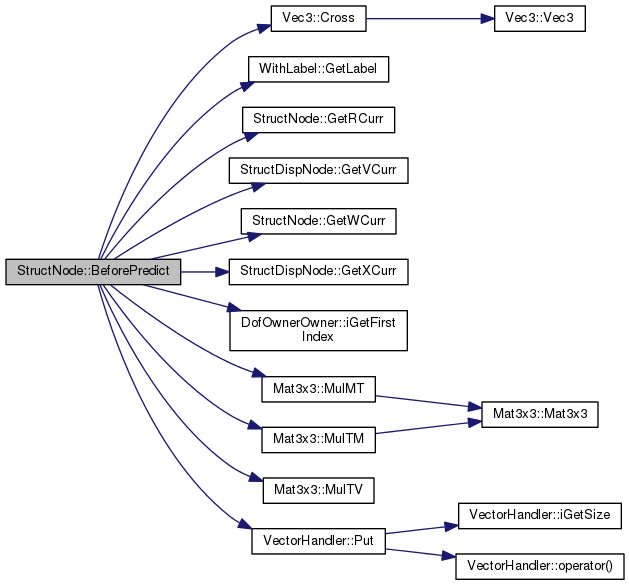
| virtual void | BeforePredict (VectorHandler &X, VectorHandler &XP, VectorHandler &XPrev, VectorHandler &XPPrev) const |
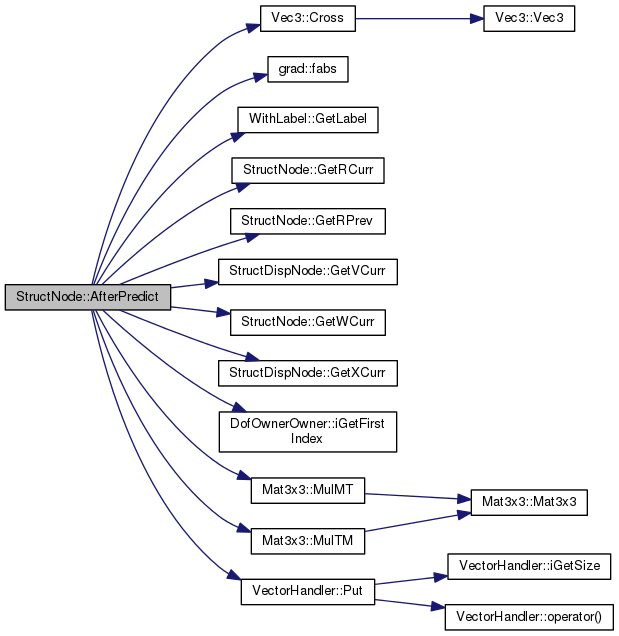
| virtual void | AfterPredict (VectorHandler &X, VectorHandler &XP) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP, const VectorHandler &XPP) |
| virtual unsigned int | iGetNumPrivData (void) const |
| virtual unsigned int | iGetPrivDataIdx (const char *s) const |
| virtual doublereal | dGetPrivData (unsigned int i) const |
| Public Member Functions inherited from StructDispNode | |
| StructDispNode (unsigned int uL, const DofOwner *pDO, const Vec3 &X0, const Vec3 &V0, const StructNode *pRN, const RigidBodyKinematics *pRBK, doublereal dPosStiff, doublereal dVelStiff, OrientationDescription od, flag fOut) | |
| virtual | ~StructDispNode (void) |
| virtual Node::Type | GetNodeType (void) const |
| const RigidBodyKinematics * | pGetRBK (void) const |
| const Vec3 & | GetX (void) const |
| const Vec3 & | GetV (void) const |
| const Vec3 & | GetXPP (void) const |
| virtual integer | iGetFirstPositionIndex (void) const |
| virtual integer | iGetFirstMomentumIndex (void) const =0 |
| virtual StructDispNode::Type | GetStructDispNodeType (void) const =0 |
| virtual DofOrder::Order | GetDofType (unsigned int) const |
| virtual const Vec3 & | GetXPrev (void) const |
| virtual const Vec3 & | GetXCurr (void) const |
| virtual const Vec3 & | GetVPrev (void) const |
| virtual const Vec3 & | GetVCurr (void) const |
| virtual const Vec3 & | GetXPPPrev (void) const |
| virtual const Vec3 & | GetXPPCurr (void) const |
| virtual const doublereal & | dGetPositionStiffness (void) const |
| virtual const doublereal & | dGetVelocityStiffness (void) const |
| virtual bool | ComputeAccelerations (bool b) |
| virtual bool | bComputeAccelerations (void) const |
| virtual bool | bOutputAccelerations (void) const |
| virtual void | OutputAccelerations (bool bOut) |
| Public Member Functions inherited from Node | |
| Node (unsigned int uL, const DofOwner *pDO, flag fOut) | |
| virtual | ~Node (void) |
| const Node * | GetNode (void) const |
| virtual integer | iGetFirstRowIndex (void) const |
| virtual integer | iGetFirstColIndex (void) const |
| Public Member Functions inherited from WithLabel | |
| WithLabel (unsigned int uL=0, const std::string &sN="") | |
| virtual | ~WithLabel (void) |
| void | PutLabel (unsigned int uL) |
| void | PutName (const std::string &sN) |
| unsigned int | GetLabel (void) const |
| const std::string & | GetName (void) const |
| Public Member Functions inherited from SimulationEntity | |
| SimulationEntity (void) | |
| virtual | ~SimulationEntity (void) |
| virtual unsigned int | iGetNumDof (void) const =0 |
| virtual bool | bIsValidIndex (unsigned int i) const |
| virtual DofOrder::Order | GetEqType (unsigned int i) const |
| virtual Hint * | ParseHint (DataManager *pDM, const char *s) const |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP) |
| virtual std::ostream & | OutputAppend (std::ostream &out) const |
| virtual void | ReadInitialState (MBDynParser &HP) |
| Public Member Functions inherited from DofOwnerOwner | |
| DofOwnerOwner (const DofOwner *pDO) | |
| virtual | ~DofOwnerOwner () |
| virtual const DofOwner * | pGetDofOwner (void) const |
| virtual integer | iGetFirstIndex (void) const |
| Public Member Functions inherited from ToBeOutput | |
| ToBeOutput (flag fOut=fDefaultOut) | |
| virtual | ~ToBeOutput (void) |
| virtual void | Output (OutputHandler &OH, const VectorHandler &X, const VectorHandler &XP) const |
| virtual flag | fToBeOutput (void) const |
| virtual bool | bToBeOutput (void) const |
| virtual void | SetOutputFlag (flag f=flag(1)) |
| Public Member Functions inherited from RigidBodyKinematics | |
| virtual | ~RigidBodyKinematics (void) |
| virtual void | Update (void) |
Protected Attributes | |
| Mat3x3 | RPrev |
| Mat3x3 | RRef |
| Mat3x3 | RCurr |
| Vec3 | gRef |
| Vec3 | gCurr |
| Vec3 | gPRef |
| Vec3 | gPCurr |
| Vec3 | WPrev |
| Vec3 | WRef |
| Vec3 | WCurr |
| Vec3 | WPCurr |
| Vec3 | WPPrev |
| bool | bOmegaRot |
| Protected Attributes inherited from StructDispNode | |
| Vec3 | XPrev |
| Vec3 | XCurr |
| Vec3 | VPrev |
| Vec3 | VCurr |
| Vec3 | XPPCurr |
| Vec3 | XPPPrev |
| const StructNode * | pRefNode |
| OrientationDescription | od |
| doublereal | dPositionStiffness |
| doublereal | dVelocityStiffness |
| const RigidBodyKinematics * | pRefRBK |
| bool | bOutputAccels |
| Protected Attributes inherited from WithLabel | |
| unsigned int | uLabel |
| std::string | sName |
| Protected Attributes inherited from ToBeOutput | |
| flag | fOutput |
| enum StructNode::Type |
| Enumerator | |
|---|---|
| UNKNOWN | |
| DYNAMIC | |
| STATIC | |
| MODAL | |
| DUMMY | |
| LASTSTRUCTNODETYPE | |
Definition at line 716 of file strnode.h.
| StructNode::StructNode | ( | unsigned int | uL, |
| const DofOwner * | pDO, | ||
| const Vec3 & | X0, | ||
| const Mat3x3 & | R0, | ||
| const Vec3 & | V0, | ||
| const Vec3 & | W0, | ||
| const StructNode * | pRN, | ||
| const RigidBodyKinematics * | pRBK, | ||
| doublereal | dPosStiff, | ||
| doublereal | dVelStiff, | ||
| bool | bOmRot, | ||
| OrientationDescription | ood, | ||
| flag | fOut | ||
| ) |
Definition at line 1439 of file strnode.cc.
References NO_OP.
Referenced by ReadBeam().
|
virtual |
Definition at line 1475 of file strnode.cc.
References NO_OP.
|
virtual |
Reimplemented from StructDispNode.
Definition at line 2592 of file strnode.cc.
References gCurr, gRef, DofOwnerOwner::iGetFirstIndex(), RCurr, RPrev, StructDispNode::VCurr, StructDispNode::VPrev, WCurr, WPCurr, WPPrev, WPrev, StructDispNode::XCurr, StructDispNode::XPPCurr, StructDispNode::XPPPrev, StructDispNode::XPrev, and Zero3.

|
virtual |
Reimplemented from StructDispNode.
Reimplemented in DummyStructNode.
Definition at line 2492 of file strnode.cc.
References c, Vec3::Cross(), grad::fabs(), gCurr, WithLabel::GetLabel(), GetRCurr(), GetRPrev(), StructDispNode::GetVCurr(), GetWCurr(), StructDispNode::GetXCurr(), gPCurr, gPRef, gRef, DofOwnerOwner::iGetFirstIndex(), CGR_Rot::MatG, CGR_Rot::MatGm1, CGR_Rot::MatR, Mat3x3::MulMT(), Mat3x3::MulTM(), CGR_Rot::Param, StructDispNode::pRefNode, VectorHandler::Put(), RCurr, RPrev, StructDispNode::VCurr, WCurr, StructDispNode::XCurr, and Zero3.
|
virtual |
Reimplemented from StructDispNode.
Reimplemented in DummyStructNode, and DynamicStructNode.
Definition at line 2389 of file strnode.cc.
References Vec3::Cross(), WithLabel::GetLabel(), GetRCurr(), StructDispNode::GetVCurr(), GetWCurr(), StructDispNode::GetXCurr(), DofOwnerOwner::iGetFirstIndex(), CGR_Rot::MatGm1, Mat3x3::MulMT(), Mat3x3::MulTM(), Mat3x3::MulTV(), CGR_Rot::Param, StructDispNode::pRefNode, VectorHandler::Put(), RCurr, RPrev, StructDispNode::VCurr, StructDispNode::VPrev, WCurr, WPrev, StructDispNode::XCurr, StructDispNode::XPrev, and Zero3.
Referenced by DynamicStructNode::BeforePredict().
|
inlinevirtual |
Definition at line 1236 of file strnode.h.
Referenced by DataManager::InitialJointAssembly().
|
virtual |
Reimplemented from StructDispNode.
Reimplemented in DummyStructNode.
Definition at line 2240 of file strnode.cc.
References gCurr, gPCurr, DofOwnerOwner::iGetFirstIndex(), StructDispNode::VCurr, and StructDispNode::XCurr.

|
virtual |
Reimplemented from StructDispNode.
Reimplemented in ModalNode, and DynamicStructNode.
Definition at line 1499 of file strnode.cc.
References DofOwnerOwner::iGetFirstIndex().
Referenced by DynamicStructNode::DescribeDof(), and ModalNode::DescribeDof().

|
virtual |
Reimplemented from StructDispNode.
Reimplemented in ModalNode, and DynamicStructNode.
Definition at line 1522 of file strnode.cc.
References WithLabel::GetLabel(), MBDYN_EXCEPT_ARGS, sn_initial_dof, and xyz.

|
virtual |
Reimplemented from StructDispNode.
Reimplemented in ModalNode, and DynamicStructNode.
Definition at line 1562 of file strnode.cc.
References DofOwnerOwner::iGetFirstIndex().
Referenced by DynamicStructNode::DescribeEq(), and ModalNode::DescribeEq().

|
virtual |
Reimplemented from StructDispNode.
Reimplemented in ModalNode, and DynamicStructNode.
Definition at line 1594 of file strnode.cc.
References WithLabel::GetLabel(), MBDYN_EXCEPT_ARGS, sn_eq, sn_initial_eq, and xyz.

|
virtual |
Reimplemented from StructDispNode.
Reimplemented in DummyStructNode, and DynamicStructNode.
Definition at line 1680 of file strnode.cc.
References ASSERT, WithLabel::GetLabel(), MBDYN_EXCEPT_ARGS, StructDispNode::VCurr, WCurr, and StructDispNode::XCurr.
Referenced by DynamicStructNode::dGetDofValue().

|
virtual |
Reimplemented from StructDispNode.
Reimplemented in DummyStructNode, and DynamicStructNode.
Definition at line 1713 of file strnode.cc.
References ASSERT, WithLabel::GetLabel(), MBDYN_EXCEPT_ARGS, StructDispNode::VPrev, WPrev, and StructDispNode::XPrev.
Referenced by DynamicStructNode::dGetDofValuePrev().

|
virtual |
Reimplemented from StructDispNode.
Definition at line 2806 of file strnode.cc.
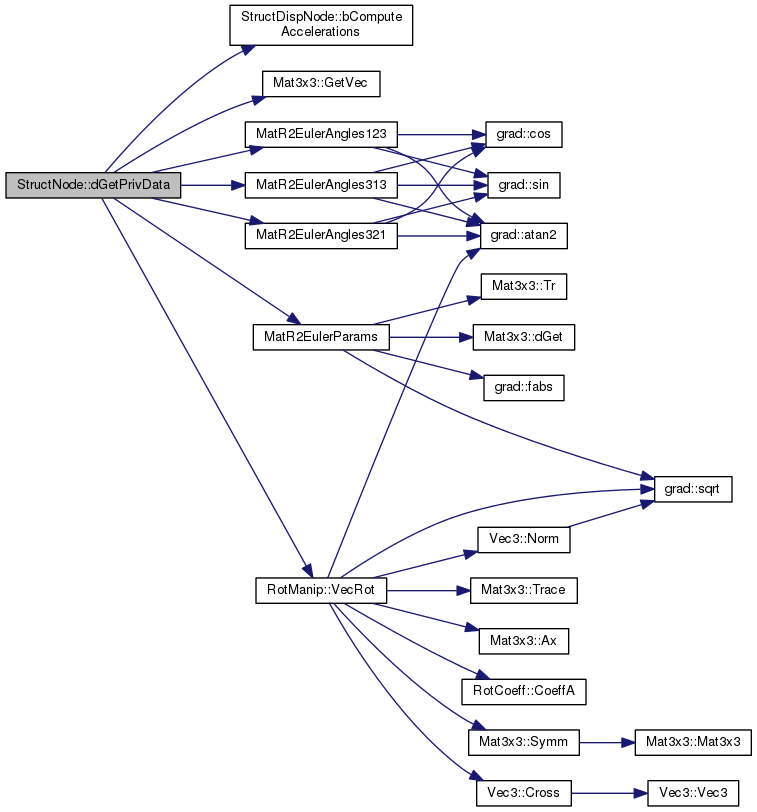
References ASSERT, StructDispNode::bComputeAccelerations(), Mat3x3::GetVec(), MatR2EulerAngles123(), MatR2EulerAngles313(), MatR2EulerAngles321(), MatR2EulerParams(), MBDYN_EXCEPT_ARGS, RCurr, StructDispNode::VCurr, RotManip::VecRot(), WCurr, WPCurr, StructDispNode::XCurr, and StructDispNode::XPPCurr.
|
inlinevirtual |
Definition at line 982 of file strnode.h.
Referenced by Modal::AssRes(), Beam2::AssStiffnessVec(), Beam::AssStiffnessVec(), ViscoElasticBeam2::AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), and ViscousDispJoint::InitialAssRes().
|
inlinevirtual |
Definition at line 994 of file strnode.h.
Referenced by Motor::AssJac(), Modal::AssRes(), ViscoElasticBeam2::AssStiffnessVec(), and ViscoElasticBeam::AssStiffnessVec().
|
inlinevirtual |
Definition at line 988 of file strnode.h.
Referenced by ViscoElasticBeam2::AfterPredict(), and ViscoElasticBeam::AfterPredict().
|
inlinevirtual |
Definition at line 976 of file strnode.h.
Referenced by HBeam::AfterPredict(), Beam2::AfterPredict(), Beam::AfterPredict(), ViscoElasticBeam2::AfterPredict(), and ViscoElasticBeam::AfterPredict().
|
virtual |
Reimplemented from StructDispNode.
Definition at line 1481 of file strnode.cc.
References GetRCurr().
Referenced by DataManager::OutputEigGeometry().

|
inlinevirtual |
Definition at line 1012 of file strnode.h.
Referenced by AerodynamicModal::AerodynamicModal(), AeroDynModule::AeroDynModule(), Brake::AfterConvergence(), PlaneHingeJoint::AfterConvergence(), TotalJoint::AfterConvergence(), PlaneRotationJoint::AfterConvergence(), TotalPinJoint::AfterConvergence(), AxialRotationJoint::AfterConvergence(), PlanePinJoint::AfterConvergence(), ElasticDispJoint::AfterPredict(), StructDispNode::AfterPredict(), ElasticDispJointInv::AfterPredict(), ElasticJointInv::AfterPredict(), ViscousDispJoint::AfterPredict(), ViscousJoint::AfterPredict(), ViscoElasticDispJoint::AfterPredict(), ViscoElasticJoint::AfterPredict(), AfterPredict(), angle(), anglerel(), DataManager::AssConstrRes(), HydrodynamicPlainBearing::AssJac(), InlineFriction::AssJac(), ContactJoint::AssJac(), asynchronous_machine::AssJac(), Motor::AssJac(), TranslAccel::AssJac(), AerodynamicModal::AssJac(), InLineWithOffsetJoint::AssJac(), TotalEquation::AssJac(), TotalJoint::AssJac(), RotAccel::AssJac(), AerodynamicBody::AssJac(), Wheel4::AssJac(), TotalReaction::AssJac(), ModuleIMUConstraint::AssJac(), TotalPinJoint::AssJac(), TotalForce::AssJac(), GimbalRotationJoint::AssMat(), DeformableJoint::AssMatCommon(), ElasticDispJoint::AssMats(), ElasticDispJointInv::AssMats(), ViscousDispJoint::AssMats(), ModalBody::AssMats(), ViscoElasticDispJoint::AssMats(), ModuleIMU::AssRes(), DispMeasure::AssRes(), ModalForce::AssRes(), Accelerometer::AssRes(), InlineFriction::AssRes(), InLineJoint::AssRes(), LoadIncNorm::AssRes(), UniversalHingeJoint::AssRes(), PrismaticJoint::AssRes(), SphericalHingeJoint::AssRes(), InPlaneJoint::AssRes(), Actuator::AssRes(), asynchronous_machine::AssRes(), Wheel2::AssRes(), Motor::AssRes(), StructExtForce::AssRes(), StructMappingExtForce::AssRes(), TranslAccel::AssRes(), Brake::AssRes(), ContactJoint::AssRes(), PlaneHingeJoint::AssRes(), AngularAccelerationJoint::AssRes(), DynamicVariableBody::AssRes(), BeamSliderJoint::AssRes(), AerodynamicModal::AssRes(), AngularVelocityJoint::AssRes(), InLineWithOffsetJoint::AssRes(), TotalEquation::AssRes(), TotalJoint::AssRes(), DistanceJointWithOffset::AssRes(), UniversalRotationJoint::AssRes(), RotAccel::AssRes(), PinJoint::AssRes(), AeroDynModule::AssRes(), InPlaneWithOffsetJoint::AssRes(), AbsoluteForce::AssRes(), StaticVariableBody::AssRes(), UniversalPinJoint::AssRes(), PlaneRotationJoint::AssRes(), Modal::AssRes(), FollowerForce::AssRes(), ClampJoint::AssRes(), Wheel4::AssRes(), TotalReaction::AssRes(), DynamicBody::AssRes(), ModuleIMUConstraint::AssRes(), TotalPinJoint::AssRes(), CyclocopterNoInflow::AssRes(), FollowerCouple::AssRes(), ModalBody::AssRes(), AxialRotationJoint::AssRes(), StaticBody::AssRes(), AbsoluteInternalForce::AssRes(), TotalForce::AssRes(), CyclocopterUniform1D::AssRes(), LoadIncForce::AssRes(), PlanePinJoint::AssRes(), FollowerInternalForce::AssRes(), DynamicInflowRotor::AssRes(), FollowerInternalCouple::AssRes(), PetersHeRotor::AssRes(), CyclocopterUniform2D::AssRes(), CyclocopterPolimi::AssRes(), Beam2::AssStiffnessMat(), HBeam::AssStiffnessMat(), Beam::AssStiffnessMat(), ViscoElasticBeam2::AssStiffnessMat(), ViscoElasticBeam::AssStiffnessMat(), Beam2::AssStiffnessVec(), HBeam::AssStiffnessVec(), Beam::AssStiffnessVec(), ViscoElasticBeam2::AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), GimbalRotationJoint::AssVec(), DriveDisplacementJoint::AssVec(), ViscousBody::AssVec(), DriveHingeJoint::AssVec(), PointSurfaceContact::AssVec(), GenericAerodynamicForce::AssVec(), RodBezier::AssVec(), AerodynamicModal::AssVec(), ElasticAxialJoint::AssVec(), ElasticDispJoint::AssVec(), ElasticHingeJoint::AssVec(), DriveDisplacementPinJoint::AssVec(), ElasticJoint::AssVec(), AerodynamicBody::AssVec(), ViscousAxialJoint::AssVec(), ElasticDispJointInv::AssVec(), ElasticHingeJointInv::AssVec(), ElasticJointInv::AssVec(), ViscousHingeJoint::AssVec(), ViscousDispJoint::AssVec(), ViscoElasticAxialJoint::AssVec(), ViscousJoint::AssVec(), ViscousHingeJointInv::AssVec(), ViscoElasticJoint::AssVec(), ViscoElasticDispJoint::AssVec(), ViscoElasticHingeJoint::AssVec(), ViscoElasticHingeJointInv::AssVec(), asynchronous_machine::asynchronous_machine(), StructDispNode::BeforePredict(), BeforePredict(), Shell4EAS::ComputeInitialNodeAndIptOrientation(), Shell4EASANS::ComputeInitialNodeOrientation(), HydrodynamicPlainBearing::ComputeResidual(), ContactJoint::ContactJoint(), NodeDistDriveCaller::dGet(), NodeDistDriveCaller::dGetP(), Motor::dGetPhiMechanical(), InlineFriction::dGetPrivData(), VariableBody::dGetPrivData(), ViscousBody::dGetPrivData(), DeformableAxialJoint::dGetPrivData(), DeformableDispJoint::dGetPrivData(), DeformableJoint::dGetPrivData(), DeformableHingeJoint::dGetPrivData(), Brake::dGetPrivData(), PlaneHingeJoint::dGetPrivData(), TotalEquation::dGetPrivData(), TotalJoint::dGetPrivData(), PlaneRotationJoint::dGetPrivData(), Body::dGetPrivData(), Modal::dGetPrivData(), TotalReaction::dGetPrivData(), TotalPinJoint::dGetPrivData(), AxialRotationJoint::dGetPrivData(), PlanePinJoint::dGetPrivData(), DeformableHingeJoint::dGetPrivDataInv(), HBeam::DsDxi(), Beam2::DsDxi(), Beam::DsDxi(), LocalNodeResForces::Force(), Motor::GetAxisOfRotation(), DynamicVariableBody::GetB_int(), DynamicBody::GetB_int(), getbladeparams(), Modal::GetCurrFEMNodesPosition(), Modal::GetCurrFEMNodesVelocity(), getelemparams(), DynamicVariableBody::GetG_int(), DynamicBody::GetG_int(), VariableBody::GetJ_int(), Modal::GetJ_int(), Body::GetJ_int(), PosRel::GetPosAbs(), PosRel::GetPosGlob(), GetR(), getrotorparams(), VariableBody::GetS_int(), Modal::GetS_int(), Body::GetS_int(), PosRel::GetVelAbs(), PosRel::GetVelGlob(), getvnvt(), Rotor::Init(), Beam::Init(), InlineFriction::InitialAssJac(), DriveDisplacementJoint::InitialAssJac(), TotalEquation::InitialAssJac(), TotalJoint::InitialAssJac(), ViscousAxialJoint::InitialAssJac(), TotalReaction::InitialAssJac(), TotalPinJoint::InitialAssJac(), ViscousHingeJoint::InitialAssJac(), ViscoElasticAxialJoint::InitialAssJac(), TotalForce::InitialAssJac(), ViscoElasticHingeJoint::InitialAssJac(), InlineFriction::InitialAssRes(), InLineJoint::InitialAssRes(), UniversalHingeJoint::InitialAssRes(), InPlaneJoint::InitialAssRes(), PrismaticJoint::InitialAssRes(), SphericalHingeJoint::InitialAssRes(), DriveDisplacementJoint::InitialAssRes(), DriveHingeJoint::InitialAssRes(), PlaneHingeJoint::InitialAssRes(), DynamicVariableBody::InitialAssRes(), InLineWithOffsetJoint::InitialAssRes(), DistanceJointWithOffset::InitialAssRes(), AerodynamicModal::InitialAssRes(), UniversalRotationJoint::InitialAssRes(), PinJoint::InitialAssRes(), TotalEquation::InitialAssRes(), InPlaneWithOffsetJoint::InitialAssRes(), TotalJoint::InitialAssRes(), AbsoluteForce::InitialAssRes(), DriveDisplacementPinJoint::InitialAssRes(), UniversalPinJoint::InitialAssRes(), PlaneRotationJoint::InitialAssRes(), Modal::InitialAssRes(), FollowerForce::InitialAssRes(), ClampJoint::InitialAssRes(), ViscousAxialJoint::InitialAssRes(), TotalReaction::InitialAssRes(), DynamicBody::InitialAssRes(), FollowerCouple::InitialAssRes(), TotalPinJoint::InitialAssRes(), ViscousHingeJoint::InitialAssRes(), ViscousDispJoint::InitialAssRes(), ViscoElasticAxialJoint::InitialAssRes(), AxialRotationJoint::InitialAssRes(), AbsoluteInternalForce::InitialAssRes(), TotalForce::InitialAssRes(), ViscoElasticDispJoint::InitialAssRes(), PlanePinJoint::InitialAssRes(), ViscoElasticHingeJoint::InitialAssRes(), FollowerInternalForce::InitialAssRes(), FollowerInternalCouple::InitialAssRes(), DataManager::InitialJointAssembly(), Rotor::InitParam(), ModalMappingExt::ModalMappingExt(), ModuleIMUConstraint::ModuleIMUConstraint(), LocalNodeResForces::Moment(), HBeam::Omega0(), Beam2::Omega0(), Beam::Omega0(), GimbalRotationJoint::Output(), DriveDisplacementJoint::Output(), ViscousBody::Output(), DriveHingeJoint::Output(), InLineJoint::Output(), UniversalHingeJoint::Output(), PrismaticJoint::Output(), SphericalHingeJoint::Output(), DeformableAxialJoint::Output(), InPlaneJoint::Output(), DeformableDispJoint::Output(), DeformableHingeJoint::Output(), DeformableJoint::Output(), StructExtForce::Output(), Brake::Output(), PlaneHingeJoint::Output(), BeamSliderJoint::Output(), AngularVelocityJoint::Output(), InLineWithOffsetJoint::Output(), ContactJoint::Output(), UniversalRotationJoint::Output(), PinJoint::Output(), TotalEquation::Output(), InPlaneWithOffsetJoint::Output(), TotalJoint::Output(), DriveDisplacementPinJoint::Output(), AbsoluteForce::Output(), UniversalPinJoint::Output(), PlaneRotationJoint::Output(), FollowerForce::Output(), ClampJoint::Output(), TotalReaction::Output(), TotalPinJoint::Output(), FollowerCouple::Output(), AxialRotationJoint::Output(), AbsoluteInternalForce::Output(), PlanePinJoint::Output(), FollowerInternalForce::Output(), FollowerInternalCouple::Output(), DeformableHingeJoint::OutputInv(), ReadBeam(), ReadBeam2(), ReadHBeam(), ReadModal(), ReadStructMappingExtForce(), ReadStructNode(), ModalMappingExt::Recv(), StructMappingExtForce::RecvFromFileDes(), StructMembraneMappingExtForce::RecvFromFileDes(), ModalMappingExt::Send(), ModalExt::Send(), StructExtForce::SendToFileDes(), StructMappingExtForce::SendToFileDes(), StructMembraneMappingExtForce::SendToFileDes(), StructExtEDGEForce::SendToStream(), StructExtForce::SendToStream(), StructMappingExtForce::SendToStream(), StructMembraneMappingExtForce::SendToStream(), DistanceJointWithOffset::SetInitialValue(), DispMeasure::SetValue(), Accelerometer::SetValue(), DriveDisplacementJoint::SetValue(), DriveHingeJoint::SetValue(), PrismaticJoint::SetValue(), SphericalHingeJoint::SetValue(), DeformableAxialJoint::SetValue(), DeformableDispJoint::SetValue(), Brake::SetValue(), DeformableHingeJoint::SetValue(), DeformableJoint::SetValue(), PlaneHingeJoint::SetValue(), TranslAccel::SetValue(), TotalEquation::SetValue(), TotalJoint::SetValue(), AngularAccelerationJoint::SetValue(), DynamicVariableBody::SetValue(), RotAccel::SetValue(), DistanceJointWithOffset::SetValue(), DriveDisplacementPinJoint::SetValue(), StructDispNode::SetValue(), PlaneRotationJoint::SetValue(), TotalReaction::SetValue(), TotalPinJoint::SetValue(), ModuleIMUConstraint::SetValue(), DynamicBody::SetValue(), AxialRotationJoint::SetValue(), PlanePinJoint::SetValue(), SetValue(), TotalJoint::TotalJoint(), TotalPinJoint::TotalPinJoint(), AircraftInstruments::Update(), OffsetDummyStructNode::Update_int(), RelFrameDummyStructNode::Update_int(), PivotRelFrameDummyStructNode::Update_int(), Shell4EAS::UpdateNodalAndAveragePosAndOrientation(), and Shell4EASANS::UpdateNodalAndAveragePosAndOrientation().
|
inlinevirtual |
Definition at line 1000 of file strnode.h.
Referenced by Brake::AfterConvergence(), StructDispNode::AfterPredict(), AfterPredict(), angle(), anglerel(), DataManager::AssConstrRes(), LoadIncNorm::AssRes(), and DataManager::InitialJointAssembly().
|
inlinevirtual |
Definition at line 1006 of file strnode.h.
Referenced by VariableBody::AfterPredict(), DriveDisplacementJoint::AfterPredict(), DriveHingeJoint::AfterPredict(), ElasticAxialJoint::AfterPredict(), ViscousBody::AfterPredict(), ElasticHingeJoint::AfterPredict(), HBeam::AfterPredict(), Beam2::AfterPredict(), ElasticJoint::AfterPredict(), ViscousAxialJoint::AfterPredict(), DriveDisplacementPinJoint::AfterPredict(), ElasticHingeJointInv::AfterPredict(), ElasticDispJointInv::AfterPredict(), Body::AfterPredict(), Beam::AfterPredict(), ElasticJointInv::AfterPredict(), ViscousHingeJoint::AfterPredict(), ViscoElasticAxialJoint::AfterPredict(), ViscoElasticBeam2::AfterPredict(), ViscousJoint::AfterPredict(), ViscousHingeJointInv::AfterPredict(), ViscoElasticJoint::AfterPredict(), ViscoElasticBeam::AfterPredict(), ViscoElasticHingeJoint::AfterPredict(), ViscoElasticHingeJointInv::AfterPredict(), HydrodynamicPlainBearing::AssJac(), Accelerometer::AssJac(), InLineJoint::AssJac(), InlineFriction::AssJac(), UniversalHingeJoint::AssJac(), PrismaticJoint::AssJac(), SphericalHingeJoint::AssJac(), InPlaneJoint::AssJac(), Actuator::AssJac(), asynchronous_machine::AssJac(), RodBezier::AssJac(), Motor::AssJac(), Brake::AssJac(), PlaneHingeJoint::AssJac(), AngularAccelerationJoint::AssJac(), AngularVelocityJoint::AssJac(), InLineWithOffsetJoint::AssJac(), TotalEquation::AssJac(), DistanceJointWithOffset::AssJac(), UniversalRotationJoint::AssJac(), PinJoint::AssJac(), TotalJoint::AssJac(), InPlaneWithOffsetJoint::AssJac(), AbsoluteForce::AssJac(), UniversalPinJoint::AssJac(), PlaneRotationJoint::AssJac(), FollowerForce::AssJac(), TotalReaction::AssJac(), FollowerCouple::AssJac(), AxialRotationJoint::AssJac(), AbsoluteInternalForce::AssJac(), TotalForce::AssJac(), LoadIncForce::AssJac(), PlanePinJoint::AssJac(), FollowerInternalForce::AssJac(), FollowerInternalCouple::AssJac(), ModalBody::AssMats(), ElasticDispJointInv::AssVec(), ElasticJointInv::AssVec(), DeformableJoint::DeformableJoint(), ElasticDispJoint::ElasticDispJoint(), ElasticDispJointInv::ElasticDispJointInv(), InlineFriction::InitialAssJac(), InLineJoint::InitialAssJac(), UniversalHingeJoint::InitialAssJac(), InPlaneJoint::InitialAssJac(), PrismaticJoint::InitialAssJac(), SphericalHingeJoint::InitialAssJac(), RodBezier::InitialAssJac(), DriveHingeJoint::InitialAssJac(), PlaneHingeJoint::InitialAssJac(), InLineWithOffsetJoint::InitialAssJac(), DistanceJointWithOffset::InitialAssJac(), UniversalRotationJoint::InitialAssJac(), PinJoint::InitialAssJac(), TotalEquation::InitialAssJac(), InPlaneWithOffsetJoint::InitialAssJac(), TotalJoint::InitialAssJac(), AbsoluteForce::InitialAssJac(), UniversalPinJoint::InitialAssJac(), PlaneRotationJoint::InitialAssJac(), FollowerForce::InitialAssJac(), TotalReaction::InitialAssJac(), FollowerCouple::InitialAssJac(), ViscousDispJoint::InitialAssJac(), AxialRotationJoint::InitialAssJac(), AbsoluteInternalForce::InitialAssJac(), TotalForce::InitialAssJac(), ViscoElasticDispJoint::InitialAssJac(), PlanePinJoint::InitialAssJac(), FollowerInternalForce::InitialAssJac(), FollowerInternalCouple::InitialAssJac(), TotalEquation::InitialAssRes(), TotalJoint::InitialAssRes(), TotalReaction::InitialAssRes(), TotalForce::InitialAssRes(), RodBezier::RodBezier(), Shell4EAS::UpdateNodalAndAveragePosAndOrientation(), Shell4EASANS::UpdateNodalAndAveragePosAndOrientation(), ViscoElasticDispJoint::ViscoElasticDispJoint(), ViscousBody::ViscousBody(), and ViscousDispJoint::ViscousDispJoint().
|
pure virtual |
Implemented in DummyStructNode, ModalNode, StaticStructNode, and DynamicStructNode.
Referenced by DataManager::DofOwnerInit(), DataManager::InitialJointAssembly(), LoadIncNorm::LoadIncNorm(), DataManager::OutputEigGeometry(), OutputPrepare(), ReadModal(), and Restart().
|
virtual |
Reimplemented from StructDispNode.
Definition at line 1487 of file strnode.cc.
References GetWCurr().

|
inlinevirtual |
Definition at line 1030 of file strnode.h.
Referenced by Brake::AfterConvergence(), PlaneHingeJoint::AfterConvergence(), AxialRotationJoint::AfterConvergence(), ViscousBody::AfterPredict(), StructDispNode::AfterPredict(), ViscousDispJoint::AfterPredict(), ViscousJoint::AfterPredict(), ViscoElasticDispJoint::AfterPredict(), ViscoElasticJoint::AfterPredict(), AfterPredict(), angvel(), angvrel(), DataManager::AssConstrRes(), HydrodynamicPlainBearing::AssJac(), InlineFriction::AssJac(), asynchronous_machine::AssJac(), Motor::AssJac(), Brake::AssJac(), PlaneHingeJoint::AssJac(), TotalEquation::AssJac(), TotalJoint::AssJac(), AerodynamicBody::AssJac(), Wheel4::AssJac(), AxialRotationJoint::AssJac(), DeformableDispJoint::AssMatFDEPrime(), DeformableAxialJoint::AssMatMDEPrime(), DeformableHingeJoint::AssMatMDEPrime(), DeformableHingeJoint::AssMatMDEPrimeInv(), ViscousBody::AssMats(), DynamicVariableBody::AssMats(), DynamicBody::AssMats(), ModalBody::AssMats(), VariableBody::AssMatsRBK_int(), Body::AssMatsRBK_int(), DeformableJoint::AssMatViscous(), ModuleIMU::AssRes(), InlineFriction::AssRes(), Actuator::AssRes(), asynchronous_machine::AssRes(), Wheel2::AssRes(), TranslAccel::AssRes(), Brake::AssRes(), PlaneHingeJoint::AssRes(), AngularAccelerationJoint::AssRes(), DynamicVariableBody::AssRes(), AerodynamicModal::AssRes(), AngularVelocityJoint::AssRes(), TotalEquation::AssRes(), TotalJoint::AssRes(), RotAccel::AssRes(), StaticVariableBody::AssRes(), Wheel4::AssRes(), DynamicBody::AssRes(), ModuleIMUConstraint::AssRes(), TotalPinJoint::AssRes(), ModalBody::AssRes(), AxialRotationJoint::AssRes(), StaticBody::AssRes(), ViscoElasticBeam::AssStiffnessMat(), ViscoElasticBeam2::AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), ViscousBody::AssVec(), GenericAerodynamicForce::AssVec(), RodBezier::AssVec(), AerodynamicBody::AssVec(), ViscousAxialJoint::AssVec(), ViscousHingeJoint::AssVec(), ViscousDispJoint::AssVec(), ViscoElasticAxialJoint::AssVec(), ViscousJoint::AssVec(), ViscousHingeJointInv::AssVec(), ViscoElasticJoint::AssVec(), ViscoElasticDispJoint::AssVec(), ViscoElasticHingeJoint::AssVec(), ViscoElasticHingeJointInv::AssVec(), VariableBody::AssVecRBK_int(), Body::AssVecRBK_int(), asynchronous_machine::asynchronous_machine(), StructDispNode::BeforePredict(), BeforePredict(), Wheel4::CalculateR_e(), HydrodynamicPlainBearing::ComputeResidual(), Motor::dGetOmega(), NodeDistDriveCaller::dGetP(), InlineFriction::dGetPrivData(), VariableBody::dGetPrivData(), ViscousBody::dGetPrivData(), DeformableAxialJoint::dGetPrivData(), DeformableDispJoint::dGetPrivData(), DeformableJoint::dGetPrivData(), DeformableHingeJoint::dGetPrivData(), Brake::dGetPrivData(), PlaneHingeJoint::dGetPrivData(), TotalEquation::dGetPrivData(), TotalJoint::dGetPrivData(), AutomaticStructElem::dGetPrivData(), PlaneRotationJoint::dGetPrivData(), Body::dGetPrivData(), Modal::dGetPrivData(), TotalReaction::dGetPrivData(), TotalPinJoint::dGetPrivData(), PlanePinJoint::dGetPrivData(), DeformableHingeJoint::dGetPrivDataInv(), DynamicVariableBody::GetB_int(), DynamicBody::GetB_int(), Modal::GetCurrFEMNodesVelocity(), DynamicVariableBody::GetG_int(), DynamicBody::GetG_int(), getrotorparams(), PosRel::GetVelAbs(), PosRel::GetVelGlob(), GetW(), InlineFriction::InitialAssJac(), TotalEquation::InitialAssJac(), TotalJoint::InitialAssJac(), ViscousAxialJoint::InitialAssJac(), TotalReaction::InitialAssJac(), TotalPinJoint::InitialAssJac(), ViscousHingeJoint::InitialAssJac(), ViscoElasticAxialJoint::InitialAssJac(), TotalForce::InitialAssJac(), ViscoElasticHingeJoint::InitialAssJac(), InlineFriction::InitialAssRes(), InLineJoint::InitialAssRes(), UniversalHingeJoint::InitialAssRes(), InPlaneJoint::InitialAssRes(), PrismaticJoint::InitialAssRes(), SphericalHingeJoint::InitialAssRes(), DriveDisplacementJoint::InitialAssRes(), DriveHingeJoint::InitialAssRes(), PlaneHingeJoint::InitialAssRes(), DynamicVariableBody::InitialAssRes(), AngularVelocityJoint::InitialAssRes(), InLineWithOffsetJoint::InitialAssRes(), AerodynamicModal::InitialAssRes(), DistanceJointWithOffset::InitialAssRes(), UniversalRotationJoint::InitialAssRes(), PinJoint::InitialAssRes(), TotalEquation::InitialAssRes(), InPlaneWithOffsetJoint::InitialAssRes(), TotalJoint::InitialAssRes(), AbsoluteForce::InitialAssRes(), DriveDisplacementPinJoint::InitialAssRes(), UniversalPinJoint::InitialAssRes(), PlaneRotationJoint::InitialAssRes(), Modal::InitialAssRes(), FollowerForce::InitialAssRes(), ClampJoint::InitialAssRes(), ViscousAxialJoint::InitialAssRes(), TotalReaction::InitialAssRes(), DynamicBody::InitialAssRes(), TotalPinJoint::InitialAssRes(), FollowerCouple::InitialAssRes(), ViscousHingeJoint::InitialAssRes(), ViscousDispJoint::InitialAssRes(), ViscoElasticAxialJoint::InitialAssRes(), AxialRotationJoint::InitialAssRes(), AbsoluteInternalForce::InitialAssRes(), TotalForce::InitialAssRes(), ViscoElasticDispJoint::InitialAssRes(), PlanePinJoint::InitialAssRes(), FollowerInternalForce::InitialAssRes(), ViscoElasticHingeJoint::InitialAssRes(), FollowerInternalCouple::InitialAssRes(), DataManager::InitialJointAssembly(), Rotor::InitParam(), HBeam::Omega0(), Beam2::Omega0(), Beam::Omega0(), DeformableAxialJoint::Output(), DeformableHingeJoint::Output(), StructExtForce::Output(), Brake::Output(), PlaneHingeJoint::Output(), TotalEquation::Output(), TotalJoint::Output(), PlaneRotationJoint::Output(), TotalReaction::Output(), TotalPinJoint::Output(), AxialRotationJoint::Output(), PlanePinJoint::Output(), DeformableHingeJoint::OutputInv(), ModalMappingExt::Send(), ModalExt::Send(), StructExtForce::SendToFileDes(), StructMappingExtForce::SendToFileDes(), StructMembraneMappingExtForce::SendToFileDes(), StructExtEDGEForce::SendToStream(), StructExtForce::SendToStream(), StructMappingExtForce::SendToStream(), StructMembraneMappingExtForce::SendToStream(), DistanceJointWithOffset::SetInitialValue(), Modal::SetInitialValue(), DispMeasure::SetValue(), TranslAccel::SetValue(), AngularAccelerationJoint::SetValue(), DynamicVariableBody::SetValue(), RotAccel::SetValue(), StructDispNode::SetValue(), Modal::SetValue(), ModuleIMUConstraint::SetValue(), DynamicBody::SetValue(), SetValue(), AircraftInstruments::Update(), OffsetDummyStructNode::Update_int(), RelFrameDummyStructNode::Update_int(), and PivotRelFrameDummyStructNode::Update_int().
|
virtual |
Reimplemented from StructDispNode.
Reimplemented in DynamicStructNode.
Definition at line 1493 of file strnode.cc.
References MBDYN_EXCEPT_ARGS.
|
inlinevirtual |
Definition at line 1042 of file strnode.h.
Referenced by ModuleIMU::AssRes(), AerodynamicModal::AssRes(), StaticVariableBody::AssRes(), Modal::AssRes(), StaticBody::AssRes(), Modal::dGetPrivData(), DynamicStructNode::GetWP(), ModalExt::Send(), StructExtForce::SendToFileDes(), StructMappingExtForce::SendToFileDes(), StructMembraneMappingExtForce::SendToFileDes(), StructExtForce::SendToStream(), StructMappingExtForce::SendToStream(), StructMembraneMappingExtForce::SendToStream(), Modal::SetValue(), OffsetDummyStructNode::Update_int(), RelFrameDummyStructNode::Update_int(), and PivotRelFrameDummyStructNode::Update_int().
|
inlinevirtual |
Definition at line 1036 of file strnode.h.
Referenced by DataManager::AssConstrRes().
|
inlinevirtual |
Definition at line 1018 of file strnode.h.
Referenced by angvel(), angvrel(), DataManager::AssConstrRes(), and DataManager::InitialJointAssembly().
|
inlinevirtual |
Definition at line 1024 of file strnode.h.
Referenced by ViscousAxialJoint::AfterPredict(), ViscousHingeJoint::AfterPredict(), ViscoElasticAxialJoint::AfterPredict(), ViscoElasticBeam2::AfterPredict(), ViscousHingeJointInv::AfterPredict(), ViscoElasticBeam::AfterPredict(), ViscoElasticHingeJoint::AfterPredict(), ViscoElasticHingeJointInv::AfterPredict(), HydrodynamicPlainBearing::AssJac(), InlineFriction::AssJac(), Actuator::AssJac(), asynchronous_machine::AssJac(), RodBezier::AssJac(), Motor::AssJac(), Brake::AssJac(), Modal::AssJac(), Wheel4::AssJac(), AxialRotationJoint::AssJac(), Modal::AssRes(), InLineJoint::InitialAssJac(), UniversalHingeJoint::InitialAssJac(), InPlaneJoint::InitialAssJac(), PrismaticJoint::InitialAssJac(), SphericalHingeJoint::InitialAssJac(), RodBezier::InitialAssJac(), DriveDisplacementJoint::InitialAssJac(), DriveHingeJoint::InitialAssJac(), PlaneHingeJoint::InitialAssJac(), DynamicVariableBody::InitialAssJac(), AngularVelocityJoint::InitialAssJac(), InLineWithOffsetJoint::InitialAssJac(), DistanceJointWithOffset::InitialAssJac(), UniversalRotationJoint::InitialAssJac(), PinJoint::InitialAssJac(), InPlaneWithOffsetJoint::InitialAssJac(), AbsoluteForce::InitialAssJac(), DriveDisplacementPinJoint::InitialAssJac(), UniversalPinJoint::InitialAssJac(), PlaneRotationJoint::InitialAssJac(), Modal::InitialAssJac(), FollowerForce::InitialAssJac(), DynamicBody::InitialAssJac(), FollowerCouple::InitialAssJac(), ViscousDispJoint::InitialAssJac(), AxialRotationJoint::InitialAssJac(), AbsoluteInternalForce::InitialAssJac(), ViscoElasticDispJoint::InitialAssJac(), PlanePinJoint::InitialAssJac(), FollowerInternalForce::InitialAssJac(), and FollowerInternalCouple::InitialAssJac().
|
inlinevirtual |
Reimplemented from StructDispNode.
Reimplemented in DummyStructNode.
|
virtual |
Reimplemented from StructDispNode.
Definition at line 2630 of file strnode.cc.
References StructDispNode::bComputeAccelerations().

|
virtual |
Reimplemented from StructDispNode.
Definition at line 2662 of file strnode.cc.
References StructDispNode::ComputeAccelerations(), WithLabel::GetLabel(), and MBDYN_EXCEPT_ARGS.

|
virtual |
Reimplemented from StructDispNode.
Reimplemented in DummyStructNode.
Definition at line 2258 of file strnode.cc.
References gCurr, DofOwnerOwner::iGetFirstIndex(), CGR_Rot::MatR, RCurr, RRef, StructDispNode::VCurr, WCurr, and StructDispNode::XCurr.

|
virtual |
Reimplemented from StructDispNode.
Definition at line 1846 of file strnode.cc.
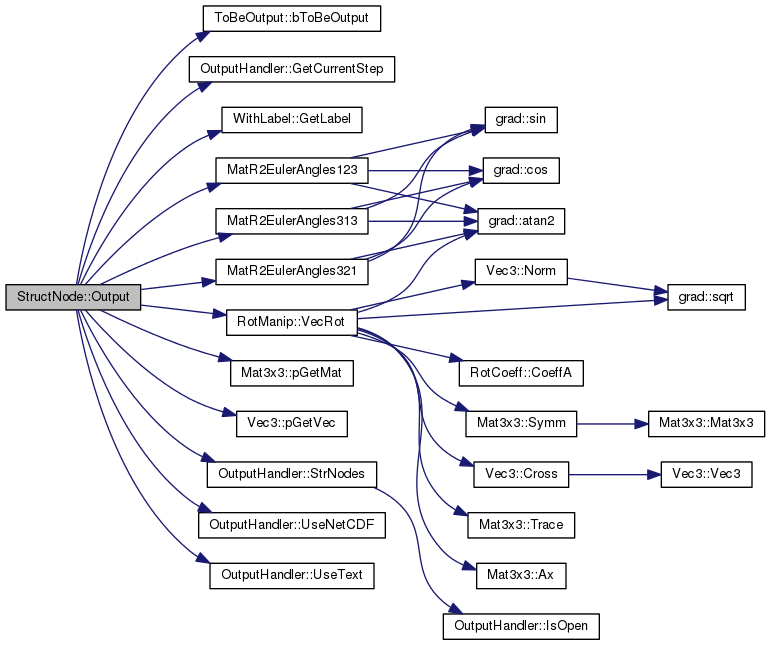
References StructDispNode::bOutputAccels, ToBeOutput::bToBeOutput(), dRaDegr, EULER_123, EULER_313, EULER_321, OutputHandler::GetCurrentStep(), WithLabel::GetLabel(), MatR2EulerAngles123(), MatR2EulerAngles313(), MatR2EulerAngles321(), StructDispNode::od, ORIENTATION_MATRIX, ORIENTATION_VECTOR, Mat3x3::pGetMat(), Vec3::pGetVec(), RCurr, OutputHandler::STRNODES, OutputHandler::StrNodes(), OutputHandler::UseNetCDF(), OutputHandler::UseText(), StructDispNode::VCurr, RotManip::VecRot(), WCurr, WPCurr, StructDispNode::XCurr, and StructDispNode::XPPCurr.
|
virtual |
Reimplemented from StructDispNode.
Definition at line 1779 of file strnode.cc.
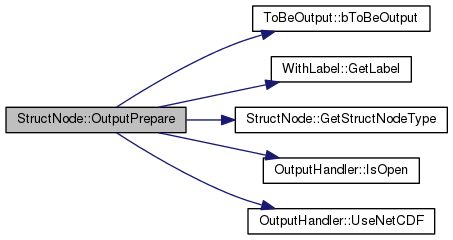
References ASSERT, StructDispNode::bOutputAccels, ToBeOutput::bToBeOutput(), DUMMY, DYNAMIC, WithLabel::GetLabel(), GetStructNodeType(), OutputHandler::IsOpen(), MODAL, OutputHandler::NETCDF, StructDispNode::od, STATIC, OutputHandler::STRNODES, and OutputHandler::UseNetCDF().
|
virtual |
Reimplemented from StructDispNode.
Definition at line 1652 of file strnode.cc.
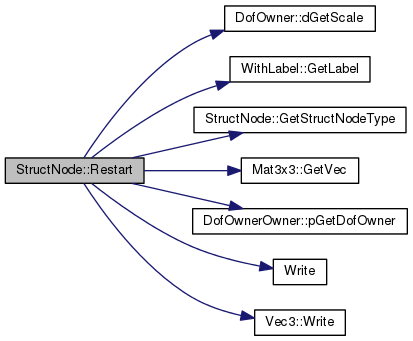
References bOmegaRot, DofOwner::dGetScale(), StructDispNode::dPositionStiffness, StructDispNode::dVelocityStiffness, DYNAMIC, WithLabel::GetLabel(), GetStructNodeType(), Mat3x3::GetVec(), DofOwnerOwner::pGetDofOwner(), RCurr, STATIC, StructDispNode::VCurr, WCurr, Write(), Vec3::Write(), and StructDispNode::XCurr.
|
virtual |
Reimplemented from StructDispNode.
Reimplemented in DummyStructNode, and DynamicStructNode.
Definition at line 1746 of file strnode.cc.
References ASSERT, WithLabel::GetLabel(), MBDYN_EXCEPT_ARGS, StructDispNode::VCurr, WCurr, and StructDispNode::XCurr.
Referenced by DynamicStructNode::SetDofValue().

|
virtual |
Initialize state vector used in initial assembly. May set internal states of the element. Do not rely on being always called, because initial assembly could be implicitly or explicitly skipped
Reimplemented from StructDispNode.
Reimplemented in DummyStructNode.
Definition at line 2319 of file strnode.cc.
References DofOwnerOwner::iGetFirstIndex(), VectorHandler::Put(), StructDispNode::VCurr, WCurr, StructDispNode::XCurr, and Zero3.
|
virtual |
Reimplemented from StructDispNode.
Reimplemented in DummyStructNode.
Definition at line 2332 of file strnode.cc.
References Vec3::Cross(), gCurr, WithLabel::GetLabel(), GetRCurr(), StructDispNode::GetVCurr(), GetWCurr(), StructDispNode::GetXCurr(), gPCurr, gPRef, gRef, DofOwnerOwner::iGetFirstIndex(), Mat3x3::MulTM(), Mat3x3::MulTV(), StructDispNode::pRefNode, VectorHandler::Put(), RCurr, RPrev, StructDispNode::VCurr, StructDispNode::VPrev, WCurr, WPrev, StructDispNode::XCurr, StructDispNode::XPrev, and Zero3.
|
virtual |
Reimplemented from StructDispNode.
Reimplemented in PivotRelFrameDummyStructNode, RelFrameDummyStructNode, OffsetDummyStructNode, ModalNode, and DynamicStructNode.
Definition at line 1939 of file strnode.cc.
References gCurr, WithLabel::GetLabel(), gPCurr, DofOwnerOwner::iGetFirstIndex(), CGR_Rot::MatG, CGR_Rot::MatR, Vec3::Norm(), RCurr, RRef, StructDispNode::VCurr, WCurr, WRef, and StructDispNode::XCurr.
|
virtual |
Reimplemented from StructDispNode.
Definition at line 2280 of file strnode.cc.
References InverseDynamics::ACCELERATION, ASSERT, gCurr, gPCurr, DofOwnerOwner::iGetFirstIndex(), CGR_Rot::MatG, CGR_Rot::MatR, MBDYN_EXCEPT_ARGS, InverseDynamics::POSITION, RCurr, RRef, StructDispNode::VCurr, InverseDynamics::VELOCITY, WCurr, WPCurr, WRef, StructDispNode::XCurr, and StructDispNode::XPPCurr.

|
protected |
|
mutableprotected |
Definition at line 733 of file strnode.h.
Referenced by AfterConvergence(), AfterPredict(), DerivativesUpdate(), InitialUpdate(), SetValue(), and Update().
|
mutableprotected |
Definition at line 735 of file strnode.h.
Referenced by AfterPredict(), DerivativesUpdate(), SetValue(), and Update().
|
mutableprotected |
Definition at line 734 of file strnode.h.
Referenced by AfterPredict(), and SetValue().
|
mutableprotected |
Definition at line 732 of file strnode.h.
Referenced by AfterConvergence(), AfterPredict(), and SetValue().
|
mutableprotected |
Definition at line 730 of file strnode.h.
Referenced by AfterConvergence(), AfterPredict(), BeforePredict(), dGetPrivData(), InitialUpdate(), Output(), Restart(), SetValue(), Update(), OffsetDummyStructNode::Update_int(), RelFrameDummyStructNode::Update_int(), and PivotRelFrameDummyStructNode::Update_int().
|
mutableprotected |
Definition at line 728 of file strnode.h.
Referenced by AfterConvergence(), AfterPredict(), BeforePredict(), and SetValue().
|
protected |
Definition at line 729 of file strnode.h.
Referenced by InitialUpdate(), and Update().
|
mutableprotected |
Definition at line 747 of file strnode.h.
Referenced by AfterConvergence(), AfterPredict(), BeforePredict(), dGetDofValue(), dGetPrivData(), InitialUpdate(), Output(), Restart(), SetDofValue(), SetInitialValue(), SetValue(), Update(), OffsetDummyStructNode::Update_int(), RelFrameDummyStructNode::Update_int(), and PivotRelFrameDummyStructNode::Update_int().
|
mutableprotected |
Definition at line 749 of file strnode.h.
Referenced by AfterConvergence(), DynamicStructNode::AfterConvergence(), DynamicStructNode::BeforePredict(), DynamicStructNode::dGetDofValue(), dGetPrivData(), Output(), DynamicStructNode::SetDofValue(), Update(), DynamicStructNode::Update(), ModalNode::Update(), OffsetDummyStructNode::Update_int(), RelFrameDummyStructNode::Update_int(), and PivotRelFrameDummyStructNode::Update_int().
|
mutableprotected |
Definition at line 750 of file strnode.h.
Referenced by AfterConvergence(), DynamicStructNode::BeforePredict(), and DynamicStructNode::dGetDofValuePrev().
|
mutableprotected |
Definition at line 745 of file strnode.h.
Referenced by AfterConvergence(), BeforePredict(), dGetDofValuePrev(), and SetValue().
 1.8.7
1.8.7 
