|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
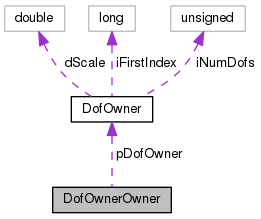
#include <dofown.h>
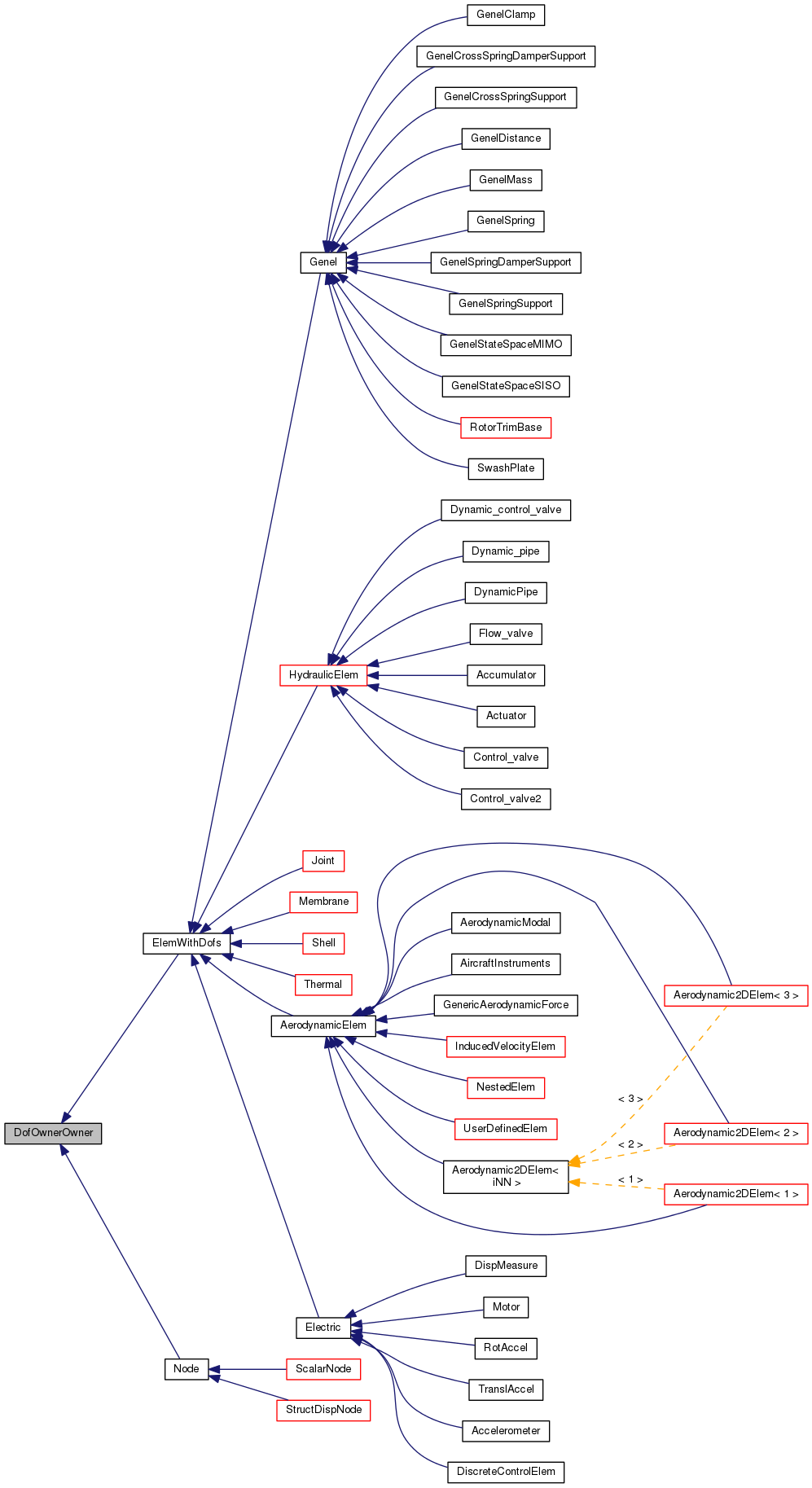
Public Member Functions | |
| DofOwnerOwner (const DofOwner *pDO) | |
| virtual | ~DofOwnerOwner () |
| virtual const DofOwner * | pGetDofOwner (void) const |
| virtual integer | iGetFirstIndex (void) const |
| virtual void | SetInitialValue (VectorHandler &X) |
Private Attributes | |
| const DofOwner * | pDofOwner |
| DofOwnerOwner::DofOwnerOwner | ( | const DofOwner * | pDO | ) |
|
inlinevirtual |
|
inlinevirtual |
Reimplemented in NestedElem.
Definition at line 127 of file dofown.h.
References DofOwner::iFirstIndex, and pDofOwner.
Referenced by Brake::AfterConvergence(), PlaneHingeJoint::AfterConvergence(), AxialRotationJoint::AfterConvergence(), StructNode::AfterConvergence(), ModuleNonsmoothNode::AfterPredict(), StructDispNode::AfterPredict(), StructNode::AfterPredict(), DataManager::AssConstrJac(), DataManager::AssConstrRes(), ModuleMDS::AssJac(), DispMeasure::AssJac(), Accelerometer::AssJac(), LinearAccelerationJoint::AssJac(), GenelClamp::AssJac(), InlineFriction::AssJac(), InLineJoint::AssJac(), Pipe::AssJac(), LinearVelocityJoint::AssJac(), DistanceJoint::AssJac(), LoadIncNorm::AssJac(), UniversalHingeJoint::AssJac(), GenelStateSpaceSISO::AssJac(), PrismaticJoint::AssJac(), SphericalHingeJoint::AssJac(), InPlaneJoint::AssJac(), ContactJoint::AssJac(), Actuator::AssJac(), ModuleFMU::AssJac(), asynchronous_machine::AssJac(), GimbalRotationJoint::AssJac(), Accumulator::AssJac(), SwashPlate::AssJac(), TikhonovRegularization::AssJac(), Motor::AssJac(), TranslAccel::AssJac(), DriveDisplacementJoint::AssJac(), Brake::AssJac(), GenelDistance::AssJac(), DriveHingeJoint::AssJac(), PlaneHingeJoint::AssJac(), AngularAccelerationJoint::AssJac(), BeamSliderJoint::AssJac(), Dynamic_pipe::AssJac(), AerodynamicModal::AssJac(), AngularVelocityJoint::AssJac(), ModuleNonsmoothNode::AssJac(), InLineWithOffsetJoint::AssJac(), GenelStateSpaceMIMO::AssJac(), TotalEquation::AssJac(), DynamicRegularization::AssJac(), Tank::AssJac(), TotalJoint::AssJac(), DistanceJointWithOffset::AssJac(), UniversalRotationJoint::AssJac(), RotAccel::AssJac(), PinJoint::AssJac(), Control_valve2::AssJac(), InPlaneWithOffsetJoint::AssJac(), JacobianRegularization::AssJac(), DynamicPipe::AssJac(), DriveDisplacementPinJoint::AssJac(), Membrane4EAS::AssJac(), UniversalPinJoint::AssJac(), PlaneRotationJoint::AssJac(), Dynamic_control_valve::AssJac(), AerodynamicBody::AssJac(), Modal::AssJac(), ClampJoint::AssJac(), Wheel4::AssJac(), TotalReaction::AssJac(), Shell4EAS::AssJac(), ModuleIMUConstraint::AssJac(), TotalPinJoint::AssJac(), Pressure_flow_control_valve::AssJac(), AerodynamicBeam::AssJac(), Shell4EASANS::AssJac(), ModalBody::AssJac(), GenelMass::AssJac(), AxialRotationJoint::AssJac(), Pressure_valve::AssJac(), AerodynamicBeam2::AssJac(), Flow_valve::AssJac(), LoadIncForce::AssJac(), PlanePinJoint::AssJac(), DynamicInflowRotor::AssJac(), PetersHeRotor::AssJac(), ModalBody::AssMats(), ModuleMDS::AssRes(), DispMeasure::AssRes(), Accelerometer::AssRes(), LinearAccelerationJoint::AssRes(), GenelClamp::AssRes(), InlineFriction::AssRes(), InLineJoint::AssRes(), LinearVelocityJoint::AssRes(), DistanceJoint::AssRes(), Pipe::AssRes(), LoadIncNorm::AssRes(), UniversalHingeJoint::AssRes(), PrismaticJoint::AssRes(), SphericalHingeJoint::AssRes(), GenelStateSpaceSISO::AssRes(), InPlaneJoint::AssRes(), Actuator::AssRes(), ModuleFMU::AssRes(), TikhonovRegularization::AssRes(), asynchronous_machine::AssRes(), GimbalRotationJoint::AssRes(), Accumulator::AssRes(), SwashPlate::AssRes(), Motor::AssRes(), TranslAccel::AssRes(), Brake::AssRes(), DriveDisplacementJoint::AssRes(), GenelDistance::AssRes(), DriveHingeJoint::AssRes(), ContactJoint::AssRes(), PlaneHingeJoint::AssRes(), AngularAccelerationJoint::AssRes(), DynamicRegularization::AssRes(), Dynamic_pipe::AssRes(), BeamSliderJoint::AssRes(), AngularVelocityJoint::AssRes(), AerodynamicModal::AssRes(), ModuleNonsmoothNode::AssRes(), InLineWithOffsetJoint::AssRes(), GenelStateSpaceMIMO::AssRes(), TotalEquation::AssRes(), Tank::AssRes(), TotalJoint::AssRes(), DistanceJointWithOffset::AssRes(), UniversalRotationJoint::AssRes(), RotAccel::AssRes(), PinJoint::AssRes(), Control_valve2::AssRes(), InPlaneWithOffsetJoint::AssRes(), Membrane4EAS::AssRes(), DynamicPipe::AssRes(), DriveDisplacementPinJoint::AssRes(), UniversalPinJoint::AssRes(), PlaneRotationJoint::AssRes(), Dynamic_control_valve::AssRes(), Modal::AssRes(), ClampJoint::AssRes(), Wheel4::AssRes(), Shell4EAS::AssRes(), TotalReaction::AssRes(), Shell4EASANS::AssRes(), ModuleIMUConstraint::AssRes(), TotalPinJoint::AssRes(), Pressure_flow_control_valve::AssRes(), ModalBody::AssRes(), GenelMass::AssRes(), AxialRotationJoint::AssRes(), Pressure_valve::AssRes(), Flow_valve::AssRes(), PlanePinJoint::AssRes(), DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), AerodynamicBody::AssVec(), AerodynamicBeam::AssVec(), AerodynamicBeam2::AssVec(), StructDispNode::BeforePredict(), StructNode::BeforePredict(), StructDispNode::DerivativesUpdate(), StructNode::DerivativesUpdate(), InlineFriction::DescribeDof(), asynchronous_machine::DescribeDof(), DriveDisplacementJoint::DescribeDof(), DriveHingeJoint::DescribeDof(), PlaneHingeJoint::DescribeDof(), TotalEquation::DescribeDof(), TotalJoint::DescribeDof(), StructDispNode::DescribeDof(), DriveDisplacementPinJoint::DescribeDof(), PlaneRotationJoint::DescribeDof(), ClampJoint::DescribeDof(), Modal::DescribeDof(), TotalReaction::DescribeDof(), TotalPinJoint::DescribeDof(), AxialRotationJoint::DescribeDof(), DynamicStructDispNode::DescribeDof(), PlanePinJoint::DescribeDof(), StructNode::DescribeDof(), DynamicStructNode::DescribeDof(), ModalNode::DescribeDof(), InlineFriction::DescribeEq(), asynchronous_machine::DescribeEq(), DriveDisplacementJoint::DescribeEq(), DriveHingeJoint::DescribeEq(), PlaneHingeJoint::DescribeEq(), TotalEquation::DescribeEq(), TotalJoint::DescribeEq(), StructDispNode::DescribeEq(), DriveDisplacementPinJoint::DescribeEq(), PlaneRotationJoint::DescribeEq(), ClampJoint::DescribeEq(), Modal::DescribeEq(), TotalPinJoint::DescribeEq(), AxialRotationJoint::DescribeEq(), DynamicStructDispNode::DescribeEq(), PlanePinJoint::DescribeEq(), StructNode::DescribeEq(), DynamicStructNode::DescribeEq(), ModalNode::DescribeEq(), DataManager::DofOwnerInit(), DataManager::IDSetTest(), Node::iGetFirstColIndex(), NestedElem::iGetFirstIndex(), DynamicStructDispNode::iGetFirstMomentumIndex(), StaticStructDispNode::iGetFirstMomentumIndex(), DynamicStructNode::iGetFirstMomentumIndex(), StaticStructNode::iGetFirstMomentumIndex(), StructDispNode::iGetFirstPositionIndex(), Node::iGetFirstRowIndex(), Modal::iGetModalIndex(), InlineFriction::InitialAssJac(), DistanceJoint::InitialAssJac(), LinearVelocityJoint::InitialAssJac(), InLineJoint::InitialAssJac(), UniversalHingeJoint::InitialAssJac(), InPlaneJoint::InitialAssJac(), PrismaticJoint::InitialAssJac(), SphericalHingeJoint::InitialAssJac(), TikhonovRegularization::InitialAssJac(), GimbalRotationJoint::InitialAssJac(), DriveDisplacementJoint::InitialAssJac(), DriveHingeJoint::InitialAssJac(), PlaneHingeJoint::InitialAssJac(), DynamicRegularization::InitialAssJac(), AngularVelocityJoint::InitialAssJac(), InLineWithOffsetJoint::InitialAssJac(), DistanceJointWithOffset::InitialAssJac(), UniversalRotationJoint::InitialAssJac(), PinJoint::InitialAssJac(), TotalEquation::InitialAssJac(), InPlaneWithOffsetJoint::InitialAssJac(), TotalJoint::InitialAssJac(), JacobianRegularization::InitialAssJac(), DriveDisplacementPinJoint::InitialAssJac(), UniversalPinJoint::InitialAssJac(), PlaneRotationJoint::InitialAssJac(), Modal::InitialAssJac(), ClampJoint::InitialAssJac(), TotalReaction::InitialAssJac(), TotalPinJoint::InitialAssJac(), AxialRotationJoint::InitialAssJac(), PlanePinJoint::InitialAssJac(), InlineFriction::InitialAssRes(), DistanceJoint::InitialAssRes(), LinearVelocityJoint::InitialAssRes(), InLineJoint::InitialAssRes(), UniversalHingeJoint::InitialAssRes(), InPlaneJoint::InitialAssRes(), PrismaticJoint::InitialAssRes(), SphericalHingeJoint::InitialAssRes(), TikhonovRegularization::InitialAssRes(), GimbalRotationJoint::InitialAssRes(), DriveDisplacementJoint::InitialAssRes(), DriveHingeJoint::InitialAssRes(), PlaneHingeJoint::InitialAssRes(), DynamicRegularization::InitialAssRes(), AngularVelocityJoint::InitialAssRes(), InLineWithOffsetJoint::InitialAssRes(), AerodynamicModal::InitialAssRes(), DistanceJointWithOffset::InitialAssRes(), UniversalRotationJoint::InitialAssRes(), PinJoint::InitialAssRes(), TotalEquation::InitialAssRes(), InPlaneWithOffsetJoint::InitialAssRes(), TotalJoint::InitialAssRes(), DriveDisplacementPinJoint::InitialAssRes(), UniversalPinJoint::InitialAssRes(), PlaneRotationJoint::InitialAssRes(), Modal::InitialAssRes(), ClampJoint::InitialAssRes(), TotalReaction::InitialAssRes(), TotalPinJoint::InitialAssRes(), AxialRotationJoint::InitialAssRes(), PlanePinJoint::InitialAssRes(), StructDispNode::InitialUpdate(), StructNode::InitialUpdate(), DataManager::OutputEigGeometry(), DistanceJoint::SetInitialValue(), Motor::SetInitialValue(), DistanceJointWithOffset::SetInitialValue(), StructDispNode::SetInitialValue(), Modal::SetInitialValue(), Wheel4::SetInitialValue(), StructNode::SetInitialValue(), DispMeasure::SetValue(), Accelerometer::SetValue(), LinearAccelerationJoint::SetValue(), InlineFriction::SetValue(), Pipe::SetValue(), LoadIncNorm::SetValue(), GenelStateSpaceSISO::SetValue(), Actuator::SetValue(), DistanceJoint::SetValue(), ModuleFMU::SetValue(), asynchronous_machine::SetValue(), Brake::SetValue(), Accumulator::SetValue(), Motor::SetValue(), PlaneHingeJoint::SetValue(), TranslAccel::SetValue(), AngularAccelerationJoint::SetValue(), Dynamic_pipe::SetValue(), GenelStateSpaceMIMO::SetValue(), Tank::SetValue(), RotAccel::SetValue(), Control_valve2::SetValue(), DistanceJointWithOffset::SetValue(), ContactJoint::SetValue(), StructDispNode::SetValue(), DynamicPipe::SetValue(), Dynamic_control_valve::SetValue(), Modal::SetValue(), ClampJoint::SetValue(), ScalarDifferentialNode::SetValue(), ModuleIMUConstraint::SetValue(), Pressure_flow_control_valve::SetValue(), AxialRotationJoint::SetValue(), GenelMass::SetValue(), ScalarAlgebraicNode::SetValue(), Pressure_valve::SetValue(), Flow_valve::SetValue(), DynamicInflowRotor::SetValue(), PetersHeRotor::SetValue(), StructNode::SetValue(), asynchronous_machine::Update(), TotalJoint::Update(), StructDispNode::Update(), ClampJoint::Update(), ScalarDifferentialNode::Update(), TotalPinJoint::Update(), ScalarAlgebraicNode::Update(), StructNode::Update(), and ModalNode::Update().
|
inlinevirtual |
Reimplemented in NestedElem.
Definition at line 113 of file dofown.h.
References ASSERT, and pDofOwner.
Referenced by DataManager::DofOwnerSet(), DataManager::IDDofInit(), DataManager::IDDofOwnerSet(), DataManager::InitialJointAssembly(), NestedElem::pGetDofOwner(), StructDispNode::Restart(), and StructNode::Restart().
|
virtual |
Initialize state vector used in initial assembly. May set internal states of the element. Do not rely on being always called, because initial assembly could be implicitly or explicitly skipped
Reimplemented in DummyStructNode, StructNode, PetersHeRotor, DynamicInflowRotor, Shell4EASANS, Shell4EAS, Wheel4, Modal, Membrane4EAS, LoadableElem, StructDispNode, NestedElem, InPlaneWithOffsetJoint, ContactJoint, DistanceJointWithOffset, Joint, RotAccel, DrivenElem, Rotor, TranslAccel, DeformableHingeJoint, Motor, InPlaneJoint, SwashPlate, InPlaneContactJoint, DistanceJoint, DeformableAxialJoint, CyclocopterInflow, asynchronous_machine, and Accelerometer.
Definition at line 56 of file dofown.cc.
References NO_OP.
Referenced by DataManager::InitialJointAssembly(), and NestedElem::SetInitialValue().
|
private |
Definition at line 107 of file dofown.h.
Referenced by DofOwnerOwner(), iGetFirstIndex(), and pGetDofOwner().
 1.8.7
1.8.7 
