|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
#include <modal.h>
Classes | |
| struct | StrNodeData |
Public Member Functions | |
| Modal (unsigned int uL, const ModalNode *pModalNodeTmp, const Vec3 &x0, const Mat3x3 &R0, const DofOwner *pDO, unsigned int N, unsigned int NS, unsigned int NFN, doublereal dMass, const Vec3 &STmp, const Mat3x3 &JTmp, const std::vector< unsigned int > &uModeNumber, MatNxN *pGenMass, MatNxN *pGenStiff, MatNxN *pGenDamp, const std::vector< std::string > &IdFEMNodes, Mat3xN *pN, const std::vector< Modal::StrNodeData > &snd, Mat3xN *pPHIt, Mat3xN *pPHIr, Mat3xN *pModeShapest, Mat3xN *pModeShapesr, Mat3xN *pInv3, Mat3xN *pInv4, Mat3xN *pInv5, Mat3xN *pInv8, Mat3xN *pInv9, Mat3xN *pInv10, Mat3xN *pInv11, VecN *a, VecN *aP, flag fOut) | |
| ~Modal (void) | |
| virtual Joint::Type | GetJointType (void) const |
| virtual std::ostream & | Restart (std::ostream &out) const |
| virtual unsigned int | iGetNumDof (void) const |
| virtual std::ostream & | DescribeDof (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeDof (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual std::ostream & | DescribeEq (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeEq (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| DofOrder::Order | GetDofType (unsigned int i) const |
| DofOrder::Order | GetEqType (unsigned int i) const |
| void | WorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| void | Output (OutputHandler &OH) const |
| virtual unsigned int | iGetInitialNumDof (void) const |
| virtual void | InitialWorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| VariableSubMatrixHandler & | InitialAssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| SubVectorHandler & | InitialAssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr) |
| void | SetInitialValue (VectorHandler &) |
| void | SetValue (DataManager *pDM, VectorHandler &, VectorHandler &, SimulationEntity::Hints *ph=0) |
| virtual unsigned int | iGetNumPrivData (void) const |
| virtual unsigned int | iGetPrivDataIdx (const char *s) const |
| virtual doublereal | dGetPrivData (unsigned int i) const |
| const Mat3xN & | pGetPHIt (void) const |
| const Mat3xN & | pGetPHIr (void) const |
| const Mat3xN & | GetCurrFEMNodesPosition (void) |
| const Mat3xN & | GetCurrFEMNodesVelocity (void) |
| integer | uGetNModes (void) const |
| const std::vector< unsigned int > & | GetModeList (void) const |
| const VecN & | GetA (void) const |
| const VecN & | GetAP (void) const |
| const VecN & | GetB (void) const |
| const VecN & | GetBP (void) const |
| integer | uGetNFEMNodes (void) |
| integer | iGetModalIndex (void) const |
| const ModalNode * | pGetModalNode (void) const |
| doublereal | dGetM (void) const |
| virtual void | GetConnectedNodes (std::vector< const Node * > &connectedNodes) const |
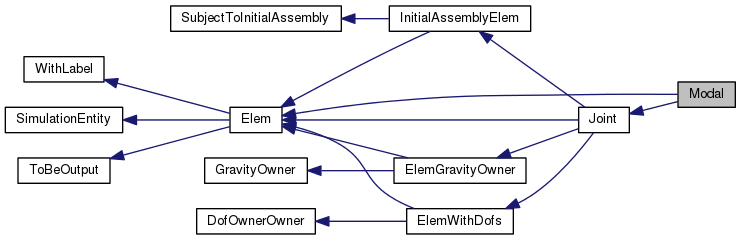
 Public Member Functions inherited from Elem Public Member Functions inherited from Elem | |
| Elem (unsigned int uL, flag fOut) | |
| virtual | ~Elem (void) |
| virtual void | AssMats (VariableSubMatrixHandler &WorkMatA, VariableSubMatrixHandler &WorkMatB, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual bool | bInverseDynamics (void) const |
| void | SetInverseDynamicsFlags (unsigned uIDF) |
| unsigned | GetInverseDynamicsFlags (void) const |
| bool | bIsErgonomy (void) const |
| bool | bIsRightHandSide (void) const |
| virtual VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| virtual SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr, const VectorHandler &XPrimePrimeCurr, InverseDynamics::Order iOrder=InverseDynamics::INVERSE_DYNAMICS) |
| virtual int | GetNumConnectedNodes (void) const |
| Public Member Functions inherited from WithLabel | |
| WithLabel (unsigned int uL=0, const std::string &sN="") | |
| virtual | ~WithLabel (void) |
| void | PutLabel (unsigned int uL) |
| void | PutName (const std::string &sN) |
| unsigned int | GetLabel (void) const |
| const std::string & | GetName (void) const |
| Public Member Functions inherited from SimulationEntity | |
| SimulationEntity (void) | |
| virtual | ~SimulationEntity (void) |
| virtual bool | bIsValidIndex (unsigned int i) const |
| virtual Hint * | ParseHint (DataManager *pDM, const char *s) const |
| virtual void | BeforePredict (VectorHandler &, VectorHandler &, VectorHandler &, VectorHandler &) const |
| virtual void | AfterPredict (VectorHandler &X, VectorHandler &XP) |
| virtual void | Update (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | DerivativesUpdate (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP, const VectorHandler &XPP) |
| virtual std::ostream & | OutputAppend (std::ostream &out) const |
| virtual void | ReadInitialState (MBDynParser &HP) |
| Public Member Functions inherited from ToBeOutput | |
| ToBeOutput (flag fOut=fDefaultOut) | |
| virtual | ~ToBeOutput (void) |
| virtual void | OutputPrepare (OutputHandler &OH) |
| virtual void | Output (OutputHandler &OH, const VectorHandler &X, const VectorHandler &XP) const |
| virtual flag | fToBeOutput (void) const |
| virtual bool | bToBeOutput (void) const |
| virtual void | SetOutputFlag (flag f=flag(1)) |
| Public Member Functions inherited from Joint | |
| Joint (unsigned int uL, const DofOwner *pD, flag fOut) | |
| virtual | ~Joint (void) |
| virtual Elem::Type | GetElemType (void) const |
| std::ostream & | Output (std::ostream &out, const char *sJointName, unsigned int uLabel, const Vec3 &FLocal, const Vec3 &MLocal, const Vec3 &FGlobal, const Vec3 &MGlobal) const |
| virtual void | Update (const VectorHandler &XCurr, InverseDynamics::Order iOrder=InverseDynamics::INVERSE_DYNAMICS) |
| bool | bIsPrescribedMotion (void) const |
| bool | bIsTorque (void) const |
| Public Member Functions inherited from ElemGravityOwner | |
| ElemGravityOwner (unsigned int uL, flag fOut) | |
| virtual | ~ElemGravityOwner (void) |
| Vec3 | GetS (void) const |
| Mat3x3 | GetJ (void) const |
| Vec3 | GetB (void) const |
| Vec3 | GetG (void) const |
| Public Member Functions inherited from GravityOwner | |
| GravityOwner (void) | |
| virtual | ~GravityOwner (void) |
| void | PutGravity (const Gravity *pG) |
| virtual bool | bGetGravity (const Vec3 &X, Vec3 &Acc) const |
| Public Member Functions inherited from ElemWithDofs | |
| ElemWithDofs (unsigned int uL, const DofOwner *pDO, flag fOut) | |
| virtual | ~ElemWithDofs (void) |
| Public Member Functions inherited from DofOwnerOwner | |
| DofOwnerOwner (const DofOwner *pDO) | |
| virtual | ~DofOwnerOwner () |
| virtual const DofOwner * | pGetDofOwner (void) const |
| virtual integer | iGetFirstIndex (void) const |
| Public Member Functions inherited from InitialAssemblyElem | |
| InitialAssemblyElem (unsigned int uL, flag fOut) | |
| virtual | ~InitialAssemblyElem (void) |
| Public Member Functions inherited from SubjectToInitialAssembly | |
| SubjectToInitialAssembly (void) | |
| virtual | ~SubjectToInitialAssembly (void) |
Protected Member Functions | |
| Vec3 | GetS_int (void) const |
| Mat3x3 | GetJ_int (void) const |
| Vec3 | GetB_int (void) const |
| Vec3 | GetG_int (void) const |
| Protected Member Functions inherited from Joint | |
| virtual void | OutputPrepare_int (const std::string &type, OutputHandler &OH, std::string &name) |
| Modal::Modal | ( | unsigned int | uL, |
| const ModalNode * | pModalNodeTmp, | ||
| const Vec3 & | x0, | ||
| const Mat3x3 & | R0, | ||
| const DofOwner * | pDO, | ||
| unsigned int | N, | ||
| unsigned int | NS, | ||
| unsigned int | NFN, | ||
| doublereal | dMass, | ||
| const Vec3 & | STmp, | ||
| const Mat3x3 & | JTmp, | ||
| const std::vector< unsigned int > & | uModeNumber, | ||
| MatNxN * | pGenMass, | ||
| MatNxN * | pGenStiff, | ||
| MatNxN * | pGenDamp, | ||
| const std::vector< std::string > & | IdFEMNodes, | ||
| Mat3xN * | pN, | ||
| const std::vector< Modal::StrNodeData > & | snd, | ||
| Mat3xN * | pPHIt, | ||
| Mat3xN * | pPHIr, | ||
| Mat3xN * | pModeShapest, | ||
| Mat3xN * | pModeShapesr, | ||
| Mat3xN * | pInv3, | ||
| Mat3xN * | pInv4, | ||
| Mat3xN * | pInv5, | ||
| Mat3xN * | pInv8, | ||
| Mat3xN * | pInv9, | ||
| Mat3xN * | pInv10, | ||
| Mat3xN * | pInv11, | ||
| VecN * | a, | ||
| VecN * | aP, | ||
| flag | fOut | ||
| ) |
Definition at line 123 of file modal.cc.
References ASSERT, ModalNode::GetStructNodeType(), StructNode::MODAL, and pModalNode.
Referenced by ReadModal().

| Modal::~Modal | ( | void | ) |
Definition at line 210 of file modal.cc.
References pInv10, pInv11, pInv3, pInv4, pInv5, pInv8, pInv9, pModalDamp, pModalMass, pModalStiff, pModeShapesr, pModeShapest, pPHIr, pPHIt, pXYZFEMNodes, and SAFEDELETE.
|
virtual |
Implements Elem.
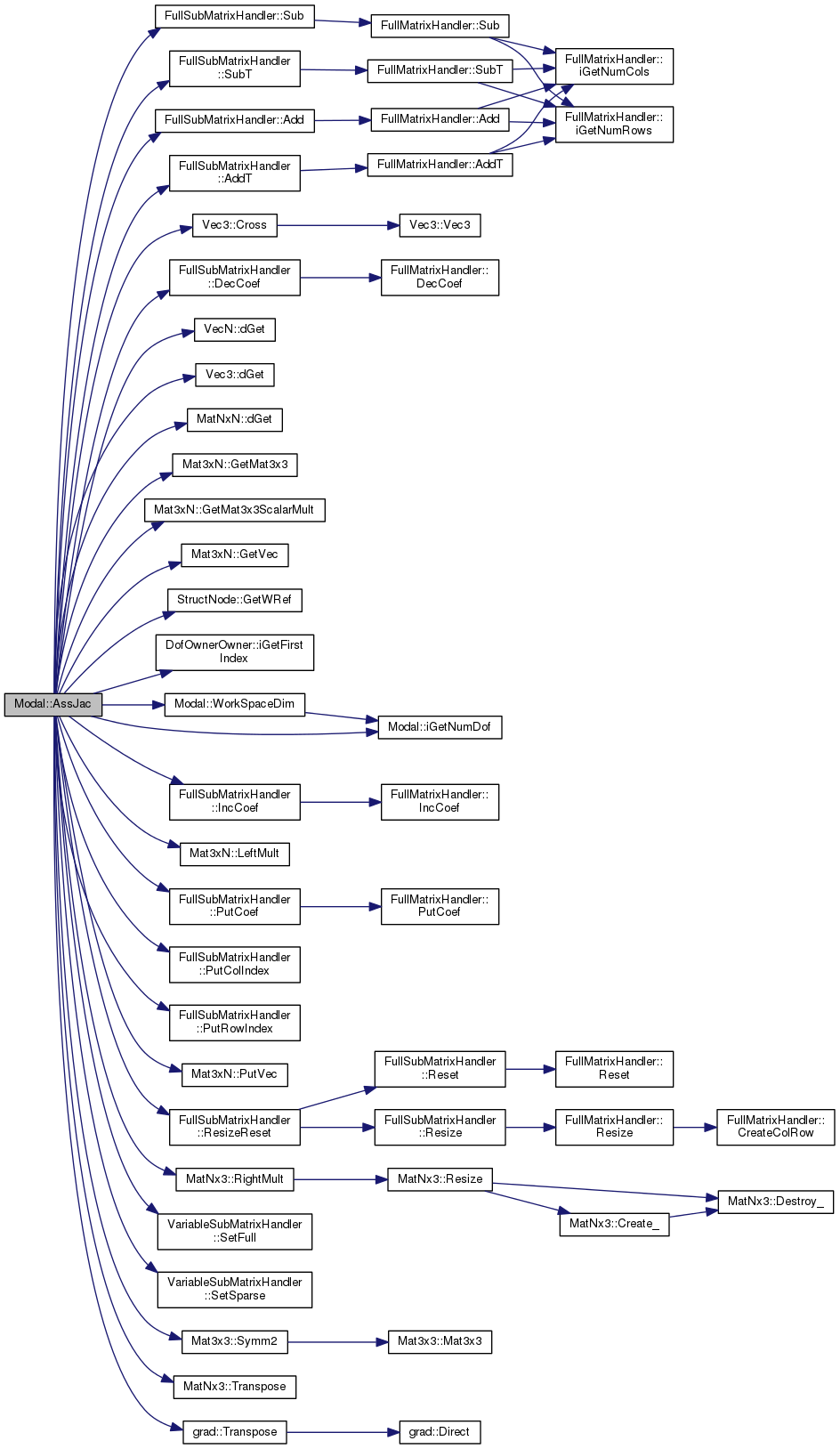
Definition at line 543 of file modal.cc.
References a, FullSubMatrixHandler::Add(), FullSubMatrixHandler::AddT(), Vec3::Cross(), DEBUGCOUT, FullSubMatrixHandler::DecCoef(), VecN::dGet(), Vec3::dGet(), MatNxN::dGet(), dMass, Mat3xN::GetMat3x3(), Mat3xN::GetMat3x3ScalarMult(), Mat3xN::GetVec(), StructNode::GetWRef(), DofOwnerOwner::iGetFirstIndex(), iGetNumDof(), FullSubMatrixHandler::IncCoef(), Inv2, Inv3jaj, Inv3jaPj, Inv5jaj, Inv5jaPj, Inv7, Inv8jaj, Inv8jaPj, Inv9jkajaPk, iRigidOffset, Mat3xN::LeftMult(), MatCross, MatCrossCross, NModes, NStrNodes, pInv3, pInv4, pInv5, pInv8, pInv9, pModalDamp, pModalMass, pModalNode, pModalStiff, pPHIr, pPHIt, FullSubMatrixHandler::PutCoef(), FullSubMatrixHandler::PutColIndex(), FullSubMatrixHandler::PutRowIndex(), Mat3xN::PutVec(), R, grad::REGULAR_JAC, FullSubMatrixHandler::ResizeReset(), MatNx3::RightMult(), RT, VariableSubMatrixHandler::SetFull(), VariableSubMatrixHandler::SetSparse(), SND, FullSubMatrixHandler::Sub(), FullSubMatrixHandler::SubT(), Mat3x3::Symm2(), MatNx3::Transpose(), grad::Transpose(), WorkSpaceDim(), Zero3, and Zero3x3.
|
virtual |
Implements Elem.
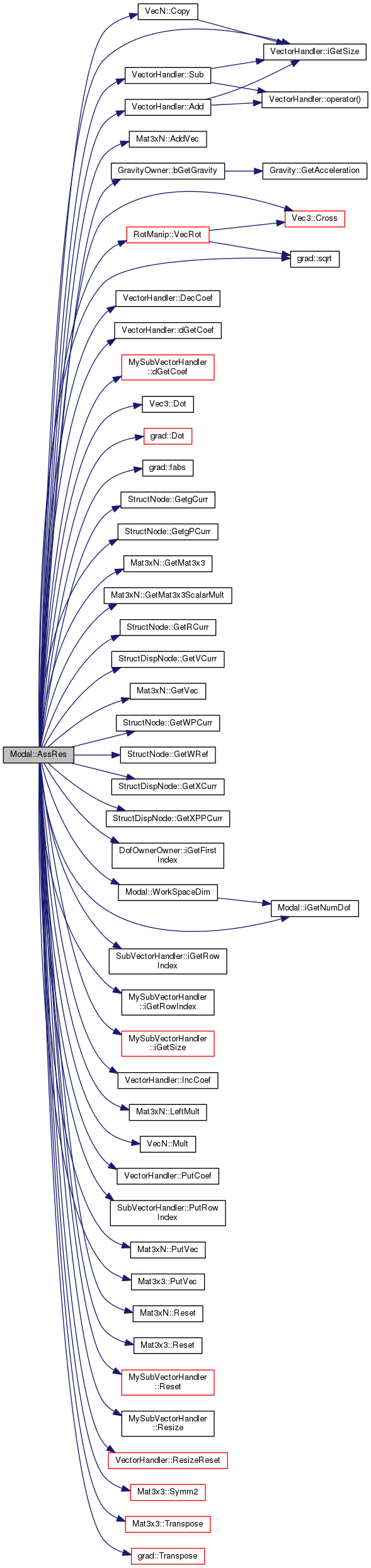
Definition at line 924 of file modal.cc.
References a, VectorHandler::Add(), Mat3xN::AddVec(), aPrime, ASSERT, b, GravityOwner::bGetGravity(), bPrime, VecN::Copy(), Vec3::Cross(), DEBUGCOUT, VectorHandler::DecCoef(), VectorHandler::dGetCoef(), MySubVectorHandler::dGetCoef(), dMass, Vec3::Dot(), grad::Dot(), grad::fabs(), StructNode::GetgCurr(), StructNode::GetgPCurr(), Mat3xN::GetMat3x3(), Mat3xN::GetMat3x3ScalarMult(), StructNode::GetRCurr(), StructDispNode::GetVCurr(), Mat3xN::GetVec(), StructNode::GetWPCurr(), StructNode::GetWRef(), StructDispNode::GetXCurr(), StructDispNode::GetXPPCurr(), GRADIENT_ASSERT, DofOwnerOwner::iGetFirstIndex(), iGetNumDof(), SubVectorHandler::iGetRowIndex(), MySubVectorHandler::iGetRowIndex(), VectorHandler::iGetSize(), MySubVectorHandler::iGetSize(), VectorHandler::IncCoef(), Inv2, Inv3jaj, Inv3jaPj, Inv5jaj, Inv5jaPj, Inv7, Inv8jaj, Inv8jaPj, Inv9jkajak, Inv9jkajaPk, iRigidOffset, Mat3xN::LeftMult(), CGR_Rot::MatG, CGR_Rot::MatR, VecN::Mult(), NModes, NStrNodes, pInv10, pInv11, pInv3, pInv4, pInv5, pInv8, pInv9, pModalDamp, pModalMass, pModalNode, pModalStiff, pPHIr, pPHIt, VectorHandler::PutCoef(), SubVectorHandler::PutRowIndex(), Mat3xN::PutVec(), Mat3x3::PutVec(), R, grad::REGULAR_RES, Mat3xN::Reset(), Mat3x3::Reset(), MySubVectorHandler::Reset(), MySubVectorHandler::Resize(), VectorHandler::ResizeReset(), RT, SND, grad::sqrt(), VectorHandler::Sub(), Mat3x3::Symm2(), Mat3x3::Transpose(), grad::Transpose(), RotManip::VecRot(), WorkSpaceDim(), x, Zero3, and Zero3x3.
|
virtual |
|
virtual |
Reimplemented from Elem.
Definition at line 339 of file modal.cc.
References WithLabel::GetLabel(), MBDYN_EXCEPT_ARGS, mdof, NModes, NStrNodes, rdof, SND, and xyz.

|
virtual |
|
virtual |
Reimplemented from Elem.
Definition at line 436 of file modal.cc.
References WithLabel::GetLabel(), MBDYN_EXCEPT_ARGS, meq, NModes, NStrNodes, req, SND, and xyz.

|
virtual |
|
virtual |
Reimplemented from SimulationEntity.
Definition at line 2903 of file modal.cc.
References a, ASSERT, b, bPrime, c, Vec3::Cross(), StructNode::GetRCurr(), StructDispNode::GetVCurr(), Mat3xN::GetVec(), StructNode::GetWCurr(), StructNode::GetWPCurr(), StructDispNode::GetXCurr(), StructDispNode::GetXPPCurr(), iGetNumPrivData(), MBDYN_EXCEPT_ARGS, NFEMNodes, NModes, pModalNode, pModeShapesr, pModeShapest, pXYZFEMNodes, R, x, and Zero3.
|
inline |
|
inline |
|
inline |
|
protectedvirtual |
Reimplemented from ElemGravityOwner.
Definition at line 3171 of file modal.cc.
References dMass, StructDispNode::GetVCurr(), pModalNode, and Zero3.

|
inline |
|
inlinevirtual |
| const Mat3xN & Modal::GetCurrFEMNodesPosition | ( | void | ) |
Definition at line 3046 of file modal.cc.
References a, Mat3xN::Add(), Mat3xN::dGet(), StructNode::GetRCurr(), StructDispNode::GetXCurr(), Mat3xN::LeftMult(), NFEMNodes, NModes, pCurrXYZ, pModalNode, pModeShapest, pXYZFEMNodes, R, SAFENEWWITHCONSTRUCTOR, and x.
| const Mat3xN & Modal::GetCurrFEMNodesVelocity | ( | void | ) |
Definition at line 3077 of file modal.cc.
References a, Mat3xN::Add(), b, Mat3xN::dGet(), StructNode::GetRCurr(), StructDispNode::GetVCurr(), StructNode::GetWCurr(), Mat3xN::LeftMult(), MatCross, NFEMNodes, NModes, pCurrXYZ, pCurrXYZVel, pModalNode, pModeShapest, pXYZFEMNodes, R, SAFENEWWITHCONSTRUCTOR, and Zero3.
|
virtual |
Reimplemented from Elem.
Definition at line 499 of file modal.cc.
References DofOrder::ALGEBRAIC, ASSERT, DofOrder::DIFFERENTIAL, iGetNumDof(), and NModes.

|
virtual |
Reimplemented from SimulationEntity.
Definition at line 514 of file modal.cc.
References DofOrder::ALGEBRAIC, ASSERT, DofOrder::DIFFERENTIAL, iGetNumDof(), and NModes.

|
protectedvirtual |
|
protectedvirtual |
Reimplemented from ElemGravityOwner.
Definition at line 3142 of file modal.cc.
References dMass, StructNode::GetRCurr(), StructDispNode::GetXCurr(), Inv2, Inv3jaj, Inv7, Inv8jaj, Inv9jkajak, MatCrossCross, Mat3x3::MulMT(), pInv3, pInv8, pInv9, pModalNode, R, Mat3x3::Symm2(), and x.
|
virtual |
|
inline |
Definition at line 367 of file modal.h.
References uModeNumber.
Referenced by ModalExt::Output(), and ReadModalForce().
|
protectedvirtual |
Reimplemented from ElemGravityOwner.
Definition at line 3125 of file modal.cc.
References dMass, StructNode::GetRCurr(), StructDispNode::GetXCurr(), Inv2, Inv3jaj, pInv3, pModalNode, R, and x.
|
virtual |
Implements SubjectToInitialAssembly.
Definition at line 1942 of file modal.cc.
References NStrNodes.
Referenced by InitialAssJac(), InitialAssRes(), and InitialWorkSpaceDim().
|
inline |
Definition at line 391 of file modal.h.
References DofOwnerOwner::iGetFirstIndex().
Referenced by AerodynamicModal::AssJac(), ModalForce::AssRes(), AerodynamicModal::AssRes(), ModalExt::AssRes(), and AerodynamicModal::InitialAssRes().

|
virtual |
Reimplemented from Elem.
Definition at line 274 of file modal.cc.
References NModes, and NStrNodes.
Referenced by AssJac(), AssRes(), GetDofType(), GetEqType(), and WorkSpaceDim().
|
virtual |
Reimplemented from SimulationEntity.
Definition at line 2737 of file modal.cc.
References NFEMNodes.
Referenced by dGetPrivData().
|
virtual |
Reimplemented from SimulationEntity.
Definition at line 2743 of file modal.cc.
References ASSERT, buf, WithLabel::GetLabel(), IdFEMNodes, and uModeNumber.

|
virtual |
Implements SubjectToInitialAssembly.
Definition at line 1955 of file modal.cc.
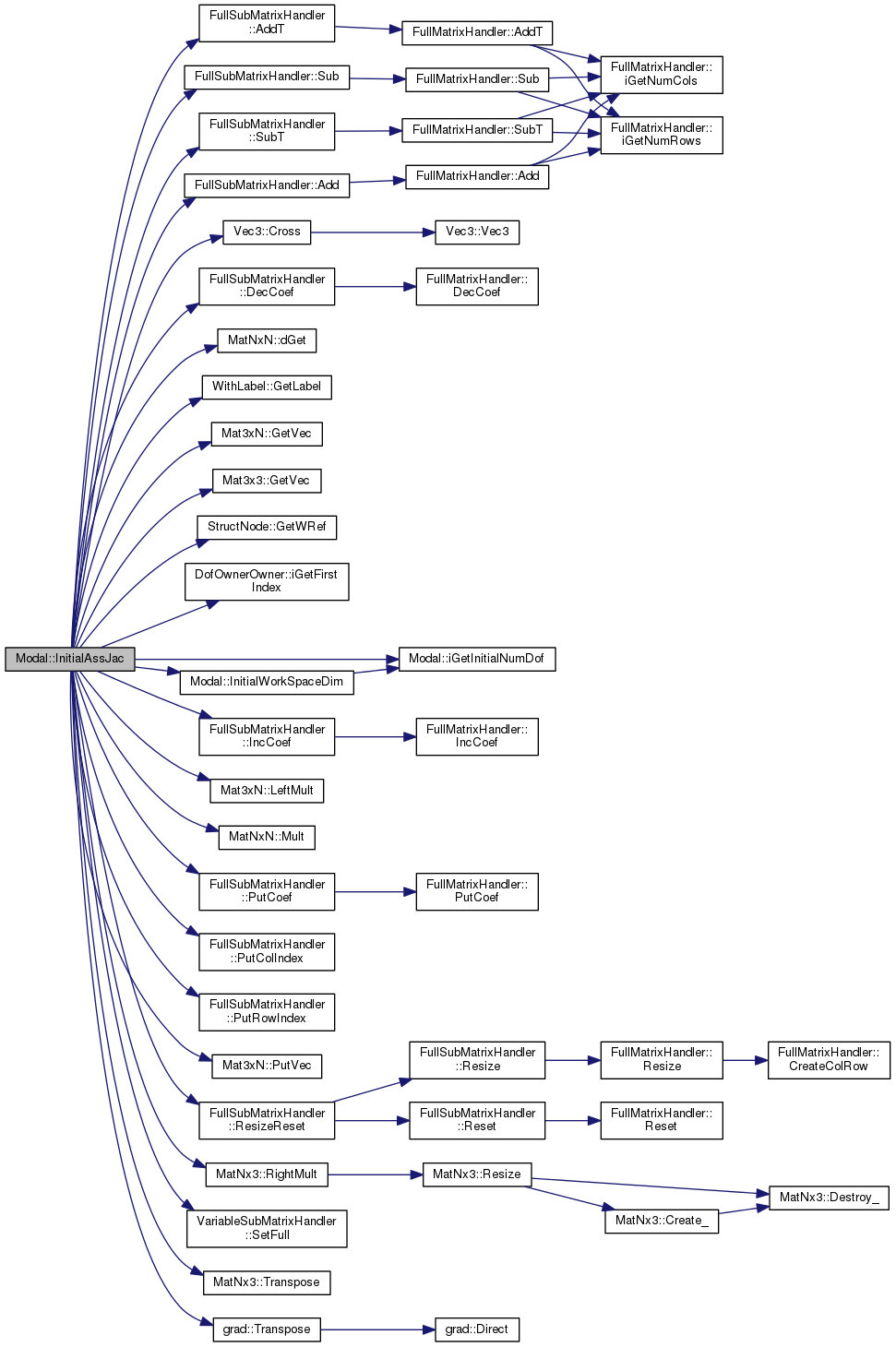
References a, FullSubMatrixHandler::Add(), FullSubMatrixHandler::AddT(), b, Vec3::Cross(), DEBUGCOUT, FullSubMatrixHandler::DecCoef(), MatNxN::dGet(), WithLabel::GetLabel(), Mat3xN::GetVec(), Mat3x3::GetVec(), StructNode::GetWRef(), DofOwnerOwner::iGetFirstIndex(), iGetInitialNumDof(), FullSubMatrixHandler::IncCoef(), InitialWorkSpaceDim(), iRigidOffset, Mat3xN::LeftMult(), MatCross, MatCrossCross, MBDYN_EXCEPT_ARGS, MatNxN::Mult(), NModes, NStrNodes, pModalDamp, pModalNode, pModalStiff, pPHIr, pPHIt, FullSubMatrixHandler::PutCoef(), FullSubMatrixHandler::PutColIndex(), FullSubMatrixHandler::PutRowIndex(), Mat3xN::PutVec(), R, FullSubMatrixHandler::ResizeReset(), MatNx3::RightMult(), RT, VariableSubMatrixHandler::SetFull(), SND, FullSubMatrixHandler::Sub(), FullSubMatrixHandler::SubT(), MatNx3::Transpose(), grad::Transpose(), and Zero3.
|
virtual |
Implements SubjectToInitialAssembly.
Definition at line 2411 of file modal.cc.
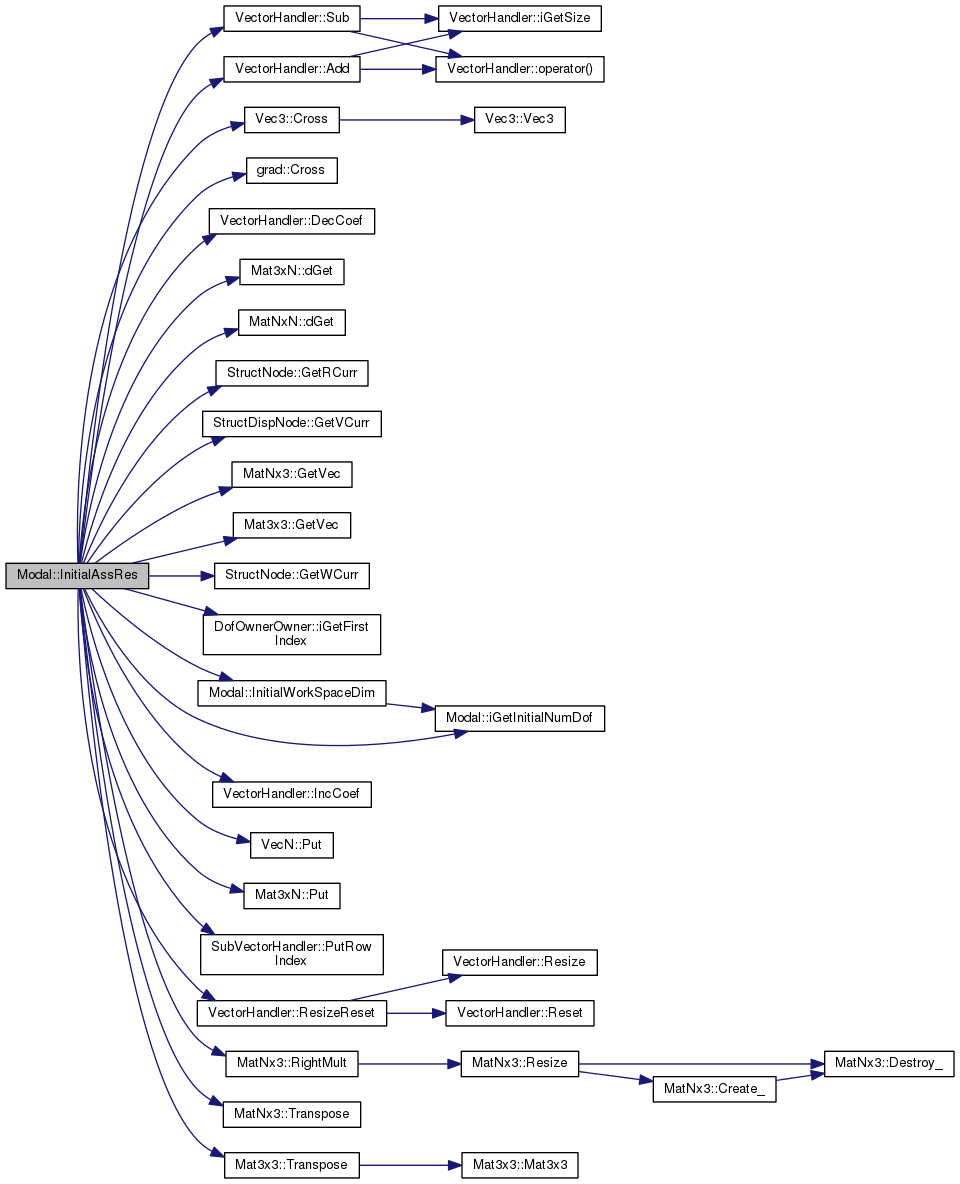
References a, VectorHandler::Add(), b, Vec3::Cross(), grad::Cross(), DEBUGCOUT, VectorHandler::DecCoef(), Mat3xN::dGet(), MatNxN::dGet(), StructNode::GetRCurr(), StructDispNode::GetVCurr(), MatNx3::GetVec(), Mat3x3::GetVec(), StructNode::GetWCurr(), DofOwnerOwner::iGetFirstIndex(), iGetInitialNumDof(), VectorHandler::IncCoef(), InitialWorkSpaceDim(), iRigidOffset, MatCross, NModes, NStrNodes, pModalDamp, pModalNode, pModalStiff, pPHIr, pPHIt, VecN::Put(), Mat3xN::Put(), SubVectorHandler::PutRowIndex(), R, VectorHandler::ResizeReset(), MatNx3::RightMult(), RT, SND, VectorHandler::Sub(), MatNx3::Transpose(), Mat3x3::Transpose(), x, and Zero3.
Implements SubjectToInitialAssembly.
Definition at line 1948 of file modal.cc.
References iGetInitialNumDof(), iRigidOffset, and NStrNodes.
Referenced by InitialAssJac(), and InitialAssRes().

|
virtual |
Reimplemented from ToBeOutput.
Definition at line 1914 of file modal.cc.
References a, b, bPrime, ToBeOutput::bToBeOutput(), WithLabel::GetLabel(), OutputHandler::Modal(), NModes, SND, and uModeNumber.
|
inline |
Definition at line 395 of file modal.h.
References pModalNode.
Referenced by ModalForce::AssRes(), ModalForce::GetConnectedNodes(), ModalForce::Output(), ReadAerodynamicModal(), ReadModalExtForce(), ReadModalForce(), ModalExt::Send(), and ModalForce::WorkSpaceDim().
|
inline |
|
inline |
|
virtual |
|
virtual |
Initialize state vector used in initial assembly. May set internal states of the element. Do not rely on being always called, because initial assembly could be implicitly or explicitly skipped
Reimplemented from Joint.
Definition at line 2664 of file modal.cc.
References a, b, StructDispNode::GetVCurr(), StructNode::GetWCurr(), DofOwnerOwner::iGetFirstIndex(), NModes, pModalNode, VectorHandler::Put(), and VectorHandler::PutCoef().

|
virtual |
Reimplemented from Joint.
Definition at line 2687 of file modal.cc.
References a, b, StructDispNode::GetVCurr(), StructNode::GetWCurr(), StructNode::GetWPCurr(), StructDispNode::GetXPPCurr(), DofOwnerOwner::iGetFirstIndex(), NModes, pModalNode, VectorHandler::Put(), and VectorHandler::PutCoef().
|
inline |
|
inline |
Definition at line 363 of file modal.h.
References NModes.
Referenced by ModalForce::AssRes(), ModalExt::AssRes(), ModalExt::ModalExt(), ModalExt::Prepare(), ReadAerodynamicModal(), ReadModalForce(), ModalExt::Send(), and ModalExt::WorkSpaceDim().
Implements Elem.
Definition at line 529 of file modal.cc.
References iGetNumDof(), iRigidOffset, NModes, NStrNodes, and pModalNode.
Referenced by AssJac(), and AssRes().

|
protected |
Definition at line 190 of file modal.h.
Referenced by AssJac(), AssRes(), dGetPrivData(), GetA(), GetCurrFEMNodesPosition(), GetCurrFEMNodesVelocity(), InitialAssJac(), InitialAssRes(), Output(), ReadModal(), SetInitialValue(), and SetValue().
|
protected |
|
protected |
Definition at line 192 of file modal.h.
Referenced by AssRes(), dGetPrivData(), GetB(), GetCurrFEMNodesVelocity(), InitialAssJac(), InitialAssRes(), Output(), SetInitialValue(), and SetValue().
|
protected |
|
protected |
Definition at line 144 of file modal.h.
Referenced by AssJac(), AssRes(), dGetM(), GetB_int(), GetJ_int(), GetS_int(), and ReadModal().
|
protected |
Definition at line 142 of file modal.h.
Referenced by iGetPrivDataIdx(), and ReadModal().
|
protected |
Definition at line 145 of file modal.h.
Referenced by AssJac(), AssRes(), GetJ_int(), and GetS_int().
|
protected |
Definition at line 171 of file modal.h.
Referenced by AssJac(), AssRes(), GetJ_int(), and GetS_int().
|
protected |
|
protected |
|
protected |
|
protected |
Definition at line 146 of file modal.h.
Referenced by AssJac(), AssRes(), and GetJ_int().
|
protected |
Definition at line 177 of file modal.h.
Referenced by AssJac(), AssRes(), and GetJ_int().
|
protected |
|
protected |
Definition at line 184 of file modal.h.
Referenced by AssRes(), and GetJ_int().
|
protected |
|
protected |
Definition at line 130 of file modal.h.
Referenced by AssJac(), AssRes(), InitialAssJac(), InitialAssRes(), InitialWorkSpaceDim(), and WorkSpaceDim().
|
protected |
Definition at line 141 of file modal.h.
Referenced by dGetPrivData(), GetCurrFEMNodesPosition(), GetCurrFEMNodesVelocity(), iGetNumPrivData(), ReadModal(), and uGetNFEMNodes().
|
protected |
Definition at line 138 of file modal.h.
Referenced by AssJac(), AssRes(), DescribeDof(), DescribeEq(), dGetPrivData(), GetCurrFEMNodesPosition(), GetCurrFEMNodesVelocity(), GetDofType(), GetEqType(), iGetNumDof(), InitialAssJac(), InitialAssRes(), Output(), ReadModal(), SetInitialValue(), SetValue(), uGetNModes(), and WorkSpaceDim().
|
protected |
Definition at line 139 of file modal.h.
Referenced by AssJac(), AssRes(), DescribeDof(), DescribeEq(), GetConnectedNodes(), iGetInitialNumDof(), iGetNumDof(), InitialAssJac(), InitialAssRes(), InitialWorkSpaceDim(), ReadModal(), and WorkSpaceDim().
|
protected |
Definition at line 159 of file modal.h.
Referenced by GetCurrFEMNodesPosition(), and GetCurrFEMNodesVelocity().
|
protected |
Definition at line 160 of file modal.h.
Referenced by GetCurrFEMNodesVelocity().
|
protected |
Definition at line 168 of file modal.h.
Referenced by AssRes(), ReadModal(), and ~Modal().
|
protected |
Definition at line 169 of file modal.h.
Referenced by AssRes(), ReadModal(), and ~Modal().
|
protected |
Definition at line 162 of file modal.h.
Referenced by AssJac(), AssRes(), GetJ_int(), GetS_int(), ReadModal(), and ~Modal().
|
protected |
|
protected |
|
protected |
Definition at line 165 of file modal.h.
Referenced by AssJac(), AssRes(), GetJ_int(), ReadModal(), and ~Modal().
|
protected |
Definition at line 166 of file modal.h.
Referenced by AssJac(), AssRes(), GetJ_int(), ReadModal(), and ~Modal().
|
protected |
Definition at line 151 of file modal.h.
Referenced by AssJac(), AssRes(), InitialAssJac(), InitialAssRes(), and ~Modal().
|
protected |
|
protected |
Definition at line 76 of file modal.h.
Referenced by AssJac(), AssRes(), dGetPrivData(), GetB_int(), GetConnectedNodes(), GetCurrFEMNodesPosition(), GetCurrFEMNodesVelocity(), GetJ_int(), GetS_int(), InitialAssJac(), InitialAssRes(), Modal(), pGetModalNode(), ReadModal(), SetInitialValue(), SetValue(), and WorkSpaceDim().
|
protected |
Definition at line 150 of file modal.h.
Referenced by AssJac(), AssRes(), InitialAssJac(), InitialAssRes(), and ~Modal().
|
protected |
Definition at line 157 of file modal.h.
Referenced by dGetPrivData(), pGetPHIr(), ReadModal(), and ~Modal().
|
protected |
Definition at line 156 of file modal.h.
Referenced by dGetPrivData(), GetCurrFEMNodesPosition(), GetCurrFEMNodesVelocity(), pGetPHIt(), ReadModal(), and ~Modal().
|
protected |
Definition at line 154 of file modal.h.
Referenced by AssJac(), AssRes(), InitialAssJac(), InitialAssRes(), and ~Modal().
|
protected |
Definition at line 153 of file modal.h.
Referenced by AssJac(), AssRes(), InitialAssJac(), InitialAssRes(), and ~Modal().
|
protected |
Definition at line 143 of file modal.h.
Referenced by dGetPrivData(), GetCurrFEMNodesPosition(), GetCurrFEMNodesVelocity(), ReadModal(), and ~Modal().
|
mutableprotected |
Definition at line 135 of file modal.h.
Referenced by AssJac(), AssRes(), dGetPrivData(), GetCurrFEMNodesPosition(), GetCurrFEMNodesVelocity(), GetJ_int(), GetS_int(), InitialAssJac(), InitialAssRes(), and ReadModal().
|
mutableprotected |
Definition at line 136 of file modal.h.
Referenced by AssJac(), AssRes(), InitialAssJac(), and InitialAssRes().
|
protected |
Definition at line 217 of file modal.h.
Referenced by AssJac(), AssRes(), DescribeDof(), DescribeEq(), GetConnectedNodes(), InitialAssJac(), InitialAssRes(), Output(), and ReadModal().
|
protected |
Definition at line 148 of file modal.h.
Referenced by GetModeList(), iGetPrivDataIdx(), Output(), and ReadModal().
|
mutableprotected |
Definition at line 134 of file modal.h.
Referenced by AssRes(), dGetPrivData(), GetCurrFEMNodesPosition(), GetJ_int(), GetS_int(), and InitialAssRes().
 1.8.7
1.8.7 


