|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
#include <output.h>
Public Types | |
| enum | { OUTPUT = 0x1U, OUTPUT_MASK = 0xFU, OUTPUT_PRIVATE = 0x10U, OUTPUT_PRIVATE_MASK = ~OUTPUT_MASK } |
Public Member Functions | |
| ToBeOutput (flag fOut=fDefaultOut) | |
| virtual | ~ToBeOutput (void) |
| virtual void | OutputPrepare (OutputHandler &OH) |
| virtual void | Output (OutputHandler &OH) const |
| virtual void | Output (OutputHandler &OH, const VectorHandler &X, const VectorHandler &XP) const |
| virtual flag | fToBeOutput (void) const |
| virtual bool | bToBeOutput (void) const |
| virtual void | SetOutputFlag (flag f=flag(1)) |
Protected Attributes | |
| flag | fOutput |
| anonymous enum |
| Enumerator | |
|---|---|
| OUTPUT | |
| OUTPUT_MASK | |
| OUTPUT_PRIVATE | |
| OUTPUT_PRIVATE_MASK | |
| ToBeOutput::ToBeOutput | ( | flag | fOut = fDefaultOut | ) |
|
virtual |
|
virtual |
Definition at line 890 of file output.cc.
References fOutput.
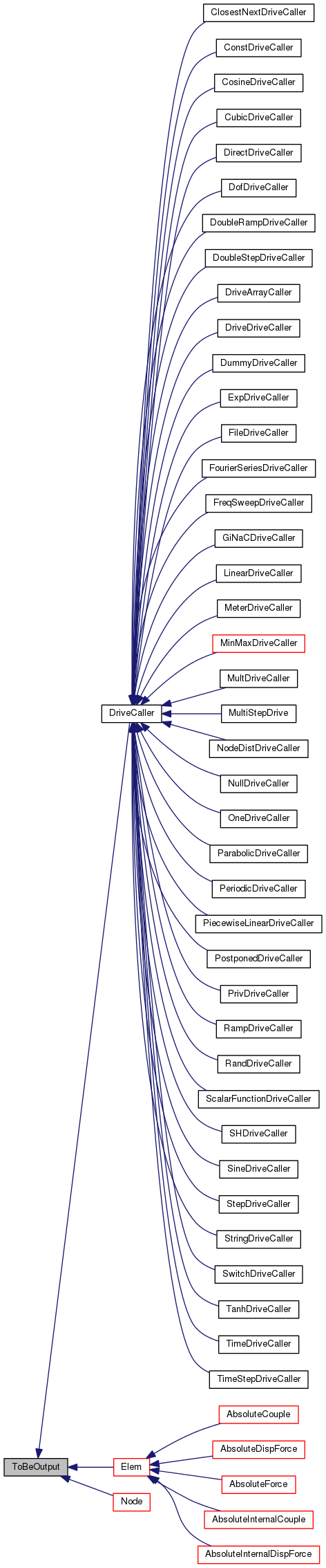
Referenced by NoRotor::AddForce(), UniformRotor::AddForce(), CyclocopterNoInflow::AddForce(), GlauertRotor::AddForce(), ManglerRotor::AddForce(), CyclocopterUniform1D::AddForce(), DynamicInflowRotor::AddForce(), PetersHeRotor::AddForce(), CyclocopterUniform2D::AddForce(), CyclocopterPolimi::AddForce(), UniformRotor2::AddSectionalForce(), StructExtForce::AssRes(), StructMappingExtForce::AssRes(), CyclocopterNoInflow::AssRes(), AerodynamicBody::AssVec(), AerodynamicBeam::AssVec(), AerodynamicBeam2::AssVec(), NoRotor::Init(), ModuleMDS::Output(), ModuleIMU::Output(), HydrodynamicPlainBearing::Output(), GenelClamp::Output(), InlineFriction::Output(), ModalForce::Output(), GimbalRotationJoint::Output(), LoadIncNorm::Output(), AbsoluteDispForce::Output(), DriveDisplacementJoint::Output(), MinorLoss::Output(), AircraftInstruments::Output(), ViscousBody::Output(), DriveHingeJoint::Output(), asynchronous_machine::Output(), LinearVelocityJoint::Output(), InLineJoint::Output(), DistanceJoint::Output(), Pipe::Output(), ModuleFMU::Output(), Control_valve::Output(), UniversalHingeJoint::Output(), CyclocopterInflow::Output(), PrismaticJoint::Output(), Wheel2::Output(), SphericalHingeJoint::Output(), DeformableAxialJoint::Output(), InPlaneJoint::Output(), GenelStateSpaceSISO::Output(), Actuator::Output(), DeformableDispJoint::Output(), ModalMappingExt::Output(), RodBezier::Output(), Accumulator::Output(), DeformableHingeJoint::Output(), DeformableJoint::Output(), GenelDistance::Output(), Rod::Output(), StructExtForce::Output(), Rotor::Output(), StructMappingExtForce::Output(), GenericAerodynamicForce::Output(), Brake::Output(), AbsoluteInternalDispForce::Output(), ThreeWayMinorLoss::Output(), AutomaticStructDispElem::Output(), PlaneHingeJoint::Output(), UniformGravity::Output(), AirProperties::Output(), ModuleNonsmoothNode::Output(), AbstractForce::Output(), BeamSliderJoint::Output(), Dynamic_pipe::Output(), AngularVelocityJoint::Output(), AerodynamicModal::Output(), InLineWithOffsetJoint::Output(), Tank::Output(), ModalExt::Output(), GenelStateSpaceMIMO::Output(), CentralGravity::Output(), DistanceJointWithOffset::Output(), UniversalRotationJoint::Output(), Control_valve2::Output(), PinJoint::Output(), TotalEquation::Output(), InPlaneWithOffsetJoint::Output(), TotalJoint::Output(), Orifice::Output(), DriveDisplacementPinJoint::Output(), AbstractInternalForce::Output(), StructDispNode::Output(), HBeam::Output(), AbsoluteForce::Output(), Beam2::Output(), DynamicPipe::Output(), AutomaticStructElem::Output(), ScalarDifferentialNode::Output(), Membrane4EAS::Output(), UniversalPinJoint::Output(), Dynamic_control_valve::Output(), PlaneRotationJoint::Output(), AerodynamicBody::Output(), Modal::Output(), Wheel4::Output(), FollowerForce::Output(), ClampJoint::Output(), TotalReaction::Output(), Beam::Output(), Shell4EAS::Output(), AbsoluteCouple::Output(), ModuleIMUConstraint::Output(), Pressure_flow_control_valve::Output(), ScalarAlgebraicNode::Output(), Shell4EASANS::Output(), AerodynamicBeam::Output(), TotalPinJoint::Output(), FollowerCouple::Output(), AxialRotationJoint::Output(), Pressure_valve::Output(), AerodynamicBeam2::Output(), AbsoluteInternalForce::Output(), ParameterNode::Output(), TotalForce::Output(), Flow_valve::Output(), CyclocopterUniform1D::Output(), LoadIncForce::Output(), DynamicInflowRotor::Output(), PlanePinJoint::Output(), FollowerInternalForce::Output(), AbsoluteInternalCouple::Output(), PetersHeRotor::Output(), FollowerInternalCouple::Output(), CyclocopterUniform2D::Output(), StructNode::Output(), CyclocopterPolimi::Output(), DeformableHingeJoint::OutputInv(), AbsoluteDispForce::OutputPrepare(), InLineJoint::OutputPrepare(), PrismaticJoint::OutputPrepare(), Inertia::OutputPrepare(), SphericalHingeJoint::OutputPrepare(), DeformableDispJoint::OutputPrepare(), DeformableHingeJoint::OutputPrepare(), DeformableJoint::OutputPrepare(), Rod::OutputPrepare(), AbsoluteInternalDispForce::OutputPrepare(), AutomaticStructDispElem::OutputPrepare(), PlaneHingeJoint::OutputPrepare(), UniversalRotationJoint::OutputPrepare(), TotalJoint::OutputPrepare(), StructDispNode::OutputPrepare(), Beam2::OutputPrepare(), AbsoluteForce::OutputPrepare(), AutomaticStructElem::OutputPrepare(), PlaneRotationJoint::OutputPrepare(), Wheel4::OutputPrepare(), FollowerForce::OutputPrepare(), Beam::OutputPrepare(), AbsoluteCouple::OutputPrepare(), TotalPinJoint::OutputPrepare(), FollowerCouple::OutputPrepare(), AxialRotationJoint::OutputPrepare(), AbsoluteInternalForce::OutputPrepare(), FollowerInternalForce::OutputPrepare(), AbsoluteInternalCouple::OutputPrepare(), FollowerInternalCouple::OutputPrepare(), StructNode::OutputPrepare(), and ModalMappingExt::Recv().
|
virtual |
Definition at line 884 of file output.cc.
References fOutput.
Referenced by NoRotor::AssRes(), UniformRotor::AssRes(), GlauertRotor::AssRes(), ManglerRotor::AssRes(), ModuleIMUConstraint::ModuleIMUConstraint(), Inertia::Output(), FollowerForce::Output(), FollowerCouple::Output(), DriveCaller::Output(), FollowerInternalForce::Output(), FollowerInternalCouple::Output(), Beam2::OutputPrepare(), FollowerForce::OutputPrepare(), Beam::OutputPrepare(), FollowerCouple::OutputPrepare(), FollowerInternalForce::OutputPrepare(), FollowerInternalCouple::OutputPrepare(), and ReadStructuralForce().
|
virtual |
Reimplemented in CyclocopterPolimi, StructNode, CyclocopterUniform2D, FollowerInternalCouple, PetersHeRotor, ViscoElasticHingeJointInv, AbsoluteInternalCouple, FollowerInternalForce, PlanePinJoint, DynamicInflowRotor, LoadIncForce, CyclocopterUniform1D, Flow_valve, TotalForce, ParameterNode, AbsoluteInternalForce, AerodynamicBeam2, ViscousHingeJointInv, Pressure_valve, DriveCaller, AxialRotationJoint, FollowerCouple, TotalPinJoint, AerodynamicBeam, Shell4EASANS, Pressure_flow_control_valve, TimeStep, ModuleIMUConstraint, AbsoluteCouple, Shell4EAS, Beam, TotalReaction, ClampJoint, FollowerForce, Wheel4, ElasticHingeJointInv, Modal, AerodynamicBody, Dynamic_control_valve, PlaneRotationJoint, UniversalPinJoint, Membrane4EAS, AutomaticStructElem, DynamicPipe, Beam2, AbsoluteForce, LoadableElem, HBeam, StructDispNode, AbstractInternalForce, ScalarNode, DriveDisplacementPinJoint, Orifice, TotalJoint, InPlaneWithOffsetJoint, TotalEquation, PinJoint, Control_valve2, UniversalRotationJoint, DistanceJointWithOffset, CentralGravity, GenelStateSpaceMIMO, ModalExt, Tank, AeroDynModule, ContactJoint, InLineWithOffsetJoint, AerodynamicModal, AngularVelocityJoint, Dynamic_pipe, BeamSliderJoint, AbstractForce, ModuleNonsmoothNode, AirProperties, UniformGravity, PlaneHingeJoint, AngularAccelerationJoint, AutomaticStructDispElem, ThreeWayMinorLoss, AbsoluteInternalDispForce, Brake, GenericAerodynamicForce, StructMappingExtForce, Rotor, Inertia, StructExtForce, Rod, GenelDistance, DeformableJoint, DeformableHingeJoint, Accumulator, RodBezier, ModalMappingExt, DeformableDispJoint, Actuator, GenelStateSpaceSISO, InPlaneJoint, DeformableAxialJoint, SphericalHingeJoint, Wheel2, PrismaticJoint, InPlaneContactJoint, CyclocopterInflow, UniversalHingeJoint, Control_valve, ModuleFMU, ElectricNode, Pipe, PointSurfaceContact, DistanceJoint, LinearVelocityJoint, InLineJoint, asynchronous_machine, DriveHingeJoint, ViscousBody, AircraftInstruments, MinorLoss, DriveDisplacementJoint, AbsoluteDispForce, LinearAccelerationJoint, LoadIncNorm, GimbalRotationJoint, ModalForce, InlineFriction, GenelClamp, HydrodynamicPlainBearing, DrivenElem, NestedElem, ModuleIMU, PressureNode, ThermalNode, ModuleMDS, and ModuleTemplate.
Definition at line 870 of file output.cc.
References NO_OP.
Referenced by DataManager::ElemOutput(), NestedElem::Output(), and DrivenElem::Output().
|
virtual |
|
virtual |
Reimplemented in StructNode, FollowerInternalCouple, AbsoluteInternalCouple, FollowerInternalForce, AbsoluteInternalForce, AxialRotationJoint, FollowerCouple, TotalPinJoint, AbsoluteCouple, Beam, FollowerForce, Wheel4, PlaneRotationJoint, AutomaticStructElem, AbsoluteForce, Beam2, StructDispNode, Aerodynamic2DElem< iNN >, Aerodynamic2DElem< 1 >, Aerodynamic2DElem< 2 >, Aerodynamic2DElem< 3 >, TotalJoint, UniversalRotationJoint, PlaneHingeJoint, AutomaticStructDispElem, AbsoluteInternalDispForce, Rod, DeformableJoint, DeformableHingeJoint, DeformableDispJoint, SphericalHingeJoint, Inertia, PrismaticJoint, InLineJoint, AbsoluteDispForce, and NestedElem.
Definition at line 863 of file output.cc.
References NO_OP.
Referenced by DataManager::ElemOutputPrepare(), and NestedElem::OutputPrepare().
Reimplemented in DynamicStructDispNode, Aerodynamic2DElem< iNN >, Aerodynamic2DElem< 1 >, Aerodynamic2DElem< 2 >, Aerodynamic2DElem< 3 >, and NestedElem.
Definition at line 896 of file output.cc.
References ASSERT, and fOutput.
Referenced by asynchronous_machine::asynchronous_machine(), LoadableElem::BindCalls(), CyclocopterNoInflow::CyclocopterNoInflow(), CyclocopterPolimi::CyclocopterPolimi(), CyclocopterUniform1D::CyclocopterUniform1D(), CyclocopterUniform2D::CyclocopterUniform2D(), HydrodynamicPlainBearing::HydrodynamicPlainBearing(), Rotor::Init(), InlineFriction::InlineFriction(), LoadIncForce::LoadIncForce(), LoadIncNorm::LoadIncNorm(), ModuleFMU::ModuleFMU(), ModuleIMU::ModuleIMU(), ModuleIMUConstraint::ModuleIMUConstraint(), ModuleMDS::ModuleMDS(), ModuleNonsmoothNode::ModuleNonsmoothNode(), DataManager::ReadElems(), DataManager::ReadNodes(), DriveCallerRead::ReadOutput(), NestedElem::SetOutputFlag(), Aerodynamic2DElem< iNN >::SetOutputFlag(), DynamicStructDispNode::SetOutputFlag(), Wheel2::Wheel2(), and Wheel4::Wheel4().
|
protected |
Definition at line 658 of file output.h.
Referenced by bToBeOutput(), fToBeOutput(), and SetOutputFlag().
 1.8.7
1.8.7 
