544 for (
int iCnt = 1; iCnt <= 6; iCnt++)
546 WorkMat.
PutRowIndex(iCnt, intShaftMomentumIndex + iCnt);
547 WorkMat.
PutColIndex(iCnt, intShaftPositionIndex + iCnt);
548 WorkMat.
PutRowIndex(iCnt+6,intBearingMomentumIndex + iCnt);
549 WorkMat.
PutColIndex(iCnt+6,intBearingPositionIndex + iCnt);
571 const Vec3 v_R2 = R2.
MulTV( X1 - X2 + R1 * o1_R1 ) - o2_R2;
576 Vec3 e_R2 = v_R2 + d1_R2 * lambda;
579 if ( e_R2(1) == 0.0 && e_R2(2) == 0.0 )
580 e_R2(1) = std::numeric_limits<doublereal>::epsilon() *
m_bdat.
d *
m_bdat.
Psi / 2.;
582 const Vec3 v_dot_R2 = R2.
MulTV( X1_dot - X2_dot + omega2.
Cross(X2 - X1) + ( omega1 - omega2 ).
Cross( R1 * o1_R1 ) );
586 Vec3 e_dot_R2 = R2.
MulTV( X1_dot - X2_dot + omega1.
Cross( R1 * o1_R1 ) - omega2.
Cross( R2 * o2_R2 )
590 if ( e_dot_R2(1) == 0.0 && e_dot_R2(2) == 0.0 )
591 e_dot_R2(1) = std::numeric_limits<doublereal>::epsilon() *
m_bdat.
d *
m_bdat.
Psi / 2.;
593 const Vec3 lambda_d1_R1 =
Vec3(0.,0.,lambda);
594 const Vec3 l1_R1 = o1_R1 + lambda_d1_R1;
595 const Vec3 l1_I = R1 * l1_R1;
596 const Vec3 l2_R2 = o2_R2 + e_R2;
600 const doublereal e_[2] = { e_R2(1), e_R2(2) }, e_dot_[2] = { e_dot_R2(1), e_dot_R2(2) };
604 { 0., 1., 0., 0., 0., 0. } };
606 { 0., 0., 0., 1., 0., 0. } };
608 { 0., 0., 0., 0., 0., 1. } };
617 doublereal eps, eps_dot, delta, SoD, SoV, my, beta;
619 hydrodynamic_plain_bearing_force_dv(
m_bdat, omega_proj, omega_projd, e_, ed, e_dot_, e_dotd, k, kd, eps, eps_dot, delta, SoD, SoV, my, beta,
NBDIRSMAX);
629 dF2_R2_de_R2(1,1) = kd[0][0]; dF2_R2_de_R2(1,2) = kd[0][1]; dF2_R2_de_R2(1,3) = 0.;
630 dF2_R2_de_R2(2,1) = kd[1][0]; dF2_R2_de_R2(2,2) = kd[1][1]; dF2_R2_de_R2(2,3) = 0.;
631 dF2_R2_de_R2(3,1) = 0.; dF2_R2_de_R2(3,2) = 0.; dF2_R2_de_R2(3,3) = 0.;
635 dF2_R2_de_dot_R2(1,1) = kd[0][2]; dF2_R2_de_dot_R2(1,2) = kd[0][3]; dF2_R2_de_dot_R2(1,3) = 0.;
636 dF2_R2_de_dot_R2(2,1) = kd[1][2]; dF2_R2_de_dot_R2(2,2) = kd[1][3]; dF2_R2_de_dot_R2(2,3) = 0.;
637 dF2_R2_de_dot_R2(3,1) = 0.; dF2_R2_de_dot_R2(3,2) = 0; dF2_R2_de_dot_R2(3,3) = 0.;
639 Vec3 dF2_R2_domega1_proj;
641 dF2_R2_domega1_proj(1) = kd[0][4];
642 dF2_R2_domega1_proj(2) = kd[1][4];
643 dF2_R2_domega1_proj(3) = 0.;
645 Vec3 dF2_R2_domega2_proj;
647 dF2_R2_domega2_proj(1) = kd[0][5];
648 dF2_R2_domega2_proj(2) = kd[1][5];
649 dF2_R2_domega2_proj(3) = 0.;
659 dM2_R2_de_R2(1,1) = 0.; dM2_R2_de_R2(1,2) = 0.; dM2_R2_de_R2(1,3) = 0.;
660 dM2_R2_de_R2(2,1) = 0.; dM2_R2_de_R2(2,2) = 0.; dM2_R2_de_R2(2,3) = 0.;
661 dM2_R2_de_R2(3,1) = kd[2][0]; dM2_R2_de_R2(3,2) = kd[2][1]; dM2_R2_de_R2(3,3) = 0.;
665 dM2_R2_de_dot_R2(1,1) = 0.; dM2_R2_de_dot_R2(1,2) = 0.; dM2_R2_de_dot_R2(1,3) = 0.;
666 dM2_R2_de_dot_R2(2,1) = 0.; dM2_R2_de_dot_R2(2,2) = 0.; dM2_R2_de_dot_R2(2,3) = 0.;
667 dM2_R2_de_dot_R2(3,1) = kd[2][2]; dM2_R2_de_dot_R2(3,2) = kd[2][3]; dM2_R2_de_dot_R2(3,3) = 0.;
669 Vec3 dM2_R2_domega1_proj;
671 dM2_R2_domega1_proj(1) = 0.;
672 dM2_R2_domega1_proj(2) = 0.;
673 dM2_R2_domega1_proj(3) = kd[2][4];
675 Vec3 dM2_R2_domega2_proj;
677 dM2_R2_domega2_proj(1) = 0.;
678 dM2_R2_domega2_proj(2) = 0.;
679 dM2_R2_domega2_proj(3) = kd[2][5];
684 dF2_R2_de_R2 *= alpha;
685 dF2_R2_de_dot_R2 *= alpha;
686 dF2_R2_domega1_proj *= alpha;
687 dF2_R2_domega2_proj *= alpha;
690 dM2_R2_de_R2 *= alpha;
691 dM2_R2_de_dot_R2 *= alpha;
692 dM2_R2_domega1_proj *= alpha;
693 dM2_R2_domega2_proj *= alpha;
697 const Vec3 F2_I = R2 * F2_R2;
698 const Vec3 M2_I = R2 * ( l2_R2.
Cross( F2_R2 ) + M2_R2 );
699 const Vec3 F1_I = -F2_I;
700 const Vec3 M1_I = -l1_I.
Cross( F2_I ) - R2 * M2_R2;
703 const Mat3x3& dv_R2_dX1 = R2_T;
719 - dd1_R2_dg1.
GetRow(3) * (2. * v_R2(3) /
std::pow(d1_R2(3), 3) * d1_dot_R2(3))
728 const Mat3x3 dv_R2_dX2 = -R2_T;
743 - dd1_R2_dg2.
GetRow(3) * (2. * v_R2(3) /
std::pow( d1_R2(3), 3) * d1_dot_R2(3))
750 const Mat3x3& dv_dot_R2_dX1_dot = R2_T;
761 const Mat3x3 dv_dot_dX2_dot = -R2_T;
772 const Mat3x3 de_R2_dX1 = dv_R2_dX1 + d1_R2.
Tens( dlambda_dX1 );
774 const Mat3x3 de_R2_dg1 = dv_R2_dg1 + d1_R2.
Tens(dlambda_dg1) + dd1_R2_dg1 * lambda;
776 const Mat3x3 de_R2_dX2 = dv_R2_dX2 + d1_R2.
Tens(dlambda_dX2);
778 const Mat3x3 de_R2_dg2 = dv_R2_dg2 + d1_R2.
Tens( dlambda_dg2 ) + dd1_R2_dg2 * lambda;
781 const Vec3 domega1_proj_dg1_dot = R2.
GetCol(3);
784 const Vec3 domega2_proj_dg2_dot = R2.
GetCol(3);
786 const Mat3x3 dF2_R2_dX1 = dF2_R2_de_R2 * de_R2_dX1 + dF2_R2_de_dot_R2 * de_dot_R2_dX1;
788 const Mat3x3 dF2_R2_dg1 = dF2_R2_de_R2 * de_R2_dg1 + dF2_R2_de_dot_R2 * de_dot_R2_dg1
789 + dF2_R2_domega1_proj.
Tens(domega1_proj_dg1);
790 const Mat3x3 dF2_R2_dX2 = dF2_R2_de_R2 * de_R2_dX2 + dF2_R2_de_dot_R2 * de_dot_R2_dX2;
791 const Mat3x3 dF2_R2_dg2 = dF2_R2_de_R2 * de_R2_dg2 + dF2_R2_de_dot_R2 * de_dot_R2_dg2
792 + dF2_R2_domega1_proj.
Tens(domega1_proj_dg2) + dF2_R2_domega2_proj.
Tens(domega2_proj_dg2);
794 const Mat3x3 dF2_I_dX1 = R2 * dF2_R2_dX1;
795 const Mat3x3 dF2_I_dg1 = R2 * dF2_R2_dg1;
796 const Mat3x3 dF2_I_dX2 = R2 * dF2_R2_dX2;
799 const Mat3x3 dF1_I_dX1 = -dF2_I_dX1;
800 const Mat3x3 dF1_I_dg1 = -dF2_I_dg1;
801 const Mat3x3 dF1_I_dX2 = -dF2_I_dX2;
802 const Mat3x3 dF1_I_dg2 = -dF2_I_dg2;
804 const Mat3x3 dM2_R2_dX1 = dM2_R2_de_R2 * de_R2_dX1 + dM2_R2_de_dot_R2 * de_dot_R2_dX1;
805 const Mat3x3 dM2_I_dX1 = R2 * ( -F2_R2.Cross(de_R2_dX1) + l2_R2.
Cross(dF2_R2_dX1) + dM2_R2_dX1 );
807 const Mat3x3 dM2_R2_dg1 = dM2_R2_de_R2 * de_R2_dg1 + dM2_R2_de_dot_R2 * de_dot_R2_dg1 + dM2_R2_domega1_proj.
Tens(domega1_proj_dg1);
808 const Mat3x3 dM2_I_dg1 = R2 * ( -F2_R2.Cross(de_R2_dg1) + l2_R2.
Cross(dF2_R2_dg1) + dM2_R2_dg1 );
810 const Mat3x3 dM2_R2_dX2 = dM2_R2_de_R2 * de_R2_dX2 + dM2_R2_de_dot_R2 * de_dot_R2_dX2;
811 const Mat3x3 dM2_I_dX2 = R2 * ( -F2_R2.Cross( de_R2_dX2 ) + l2_R2.
Cross(dF2_R2_dX2) + dM2_R2_dX2 );
813 const Mat3x3 dM2_R2_dg2 = dM2_R2_de_R2 * de_R2_dg2 + dM2_R2_de_dot_R2 * de_dot_R2_dg2
814 + dM2_R2_domega1_proj.
Tens(domega1_proj_dg2) + dM2_R2_domega2_proj.
Tens(domega2_proj_dg2);
816 + R2 * ( -F2_R2.Cross(de_R2_dg2) + l2_R2.
Cross(dF2_R2_dg2) + dM2_R2_dg2 );
818 const Mat3x3 dM1_I_dX1 = ( R2 * F2_R2 ).
Cross( R1.
GetCol(3) ).Tens( dlambda_dX1 )
819 - l1_I.
Cross( R2 * dF2_R2_dX1 ) - R2 * dM2_R2_dX1;
822 - l1_I.
Cross( R2 * dF2_R2_dg1 ) - R2 * dM2_R2_dg1;
825 - l1_I.
Cross( R2 * dF2_R2_dX2 ) - R2 * dM2_R2_dX2;
831 const Mat3x3 dF2_R2_dX1_dot = dF2_R2_de_dot_R2 * de_dot_R2_dX1_dot;
832 const Mat3x3 dF2_I_dX1_dot = R2 * dF2_R2_dX1_dot;
834 const Mat3x3 dF2_R2_dg1_dot = dF2_R2_de_dot_R2 * de_dot_R2_dg1_dot + dF2_R2_domega1_proj.
Tens( domega1_proj_dg1_dot );
835 const Mat3x3 dF2_I_dg1_dot = R2 * dF2_R2_dg1_dot;
837 const Mat3x3 dF2_R2_dX2_dot = dF2_R2_de_dot_R2 * de_dot_R2_dX2_dot;
838 const Mat3x3 dF2_I_dX2_dot = R2 * dF2_R2_dX2_dot;
840 const Mat3x3 dF2_R2_dg2_dot = dF2_R2_de_dot_R2 * de_dot_R2_dg2_dot + dF2_R2_domega2_proj.
Tens( domega2_proj_dg2_dot );
841 const Mat3x3 dF2_I_dg2_dot = R2 * dF2_R2_dg2_dot;
843 const Mat3x3 dF1_I_dX1_dot = -dF2_I_dX1_dot;
844 const Mat3x3 dF1_I_dg1_dot = -dF2_I_dg1_dot;
845 const Mat3x3 dF1_I_dX2_dot = -dF2_I_dX2_dot;
846 const Mat3x3 dF1_I_dg2_dot = -dF2_I_dg2_dot;
848 const Mat3x3 dM2_R2_dX1_dot = dM2_R2_de_dot_R2 * de_dot_R2_dX1_dot;
849 const Mat3x3 dM2_I_dX1_dot = R2 * ( l2_R2.
Cross( dF2_R2_dX1_dot) + dM2_R2_dX1_dot );
851 const Mat3x3 dM2_R2_dg1_dot = dM2_R2_de_dot_R2 * de_dot_R2_dg1_dot + dM2_R2_domega1_proj.
Tens( domega1_proj_dg1_dot );
852 const Mat3x3 dM2_I_dg1_dot = R2 * ( l2_R2.
Cross( dF2_R2_dg1_dot ) + dM2_R2_dg1_dot );
854 const Mat3x3 dM2_R2_dX2_dot = dM2_R2_de_dot_R2 * de_dot_R2_dX2_dot;
855 const Mat3x3 dM2_I_dX2_dot = R2 * ( l2_R2.
Cross(dF2_R2_dX2_dot) + dM2_R2_dX2_dot );
857 const Mat3x3 dM2_R2_dg2_dot = dM2_R2_de_dot_R2 * de_dot_R2_dg2_dot + dM2_R2_domega2_proj.
Tens(domega2_proj_dg2_dot);
858 const Mat3x3 dM2_I_dg2_dot = R2 * ( l2_R2.
Cross( dF2_R2_dg2_dot ) + dM2_R2_dg2_dot );
860 const Mat3x3 dM1_I_dX1_dot = -l1_I.
Cross( R2 * dF2_R2_dX1_dot ) - R2 * dM2_R2_dX1_dot;
861 const Mat3x3 dM1_I_dg1_dot = -l1_I.
Cross( R2 * dF2_R2_dg1_dot ) - R2 * dM2_R2_dg1_dot;
862 const Mat3x3 dM1_I_dX2_dot = -l1_I.
Cross( R2 * dF2_R2_dX2_dot ) - R2 * dM2_R2_dX2_dot;
863 const Mat3x3 dM1_I_dg2_dot = -l1_I.
Cross( R2 * dF2_R2_dg2_dot ) - R2 * dM2_R2_dg2_dot;
873 WorkMat.
Sub( 1, 1, dF1_I_dX1_dot + dF1_I_dX1 * dCoef );
874 WorkMat.
Sub( 1, 4, dF1_I_dg1_dot + dF1_I_dg1 * dCoef );
875 WorkMat.
Sub( 1, 7, dF1_I_dX2_dot + dF1_I_dX2 * dCoef );
876 WorkMat.
Sub( 1, 10, dF1_I_dg2_dot + dF1_I_dg2 * dCoef );
878 WorkMat.
Sub( 4, 1, dM1_I_dX1_dot + dM1_I_dX1 * dCoef );
879 WorkMat.
Sub( 4, 4, dM1_I_dg1_dot + dM1_I_dg1 * dCoef );
880 WorkMat.
Sub( 4, 7, dM1_I_dX2_dot + dM1_I_dX2 * dCoef );
881 WorkMat.
Sub( 4, 10, dM1_I_dg2_dot + dM1_I_dg2 * dCoef );
883 WorkMat.
Sub( 7, 1, dF2_I_dX1_dot + dF2_I_dX1 * dCoef );
884 WorkMat.
Sub( 7, 4, dF2_I_dg1_dot + dF2_I_dg1 * dCoef );
885 WorkMat.
Sub( 7, 7, dF2_I_dX2_dot + dF2_I_dX2 * dCoef );
886 WorkMat.
Sub( 7, 10, dF2_I_dg2_dot + dF2_I_dg2 * dCoef );
888 WorkMat.
Sub( 10, 1, dM2_I_dX1_dot + dM2_I_dX1 * dCoef );
889 WorkMat.
Sub( 10, 4, dM2_I_dg1_dot + dM2_I_dg1 * dCoef );
890 WorkMat.
Sub( 10, 7, dM2_I_dX2_dot + dM2_I_dX2 * dCoef );
891 WorkMat.
Sub( 10, 10, dM2_I_dg2_dot + dM2_I_dg2 * dCoef );
894 std::cerr << __FILE__ <<
":" << __LINE__ <<
":" << __FUNCTION__ <<
":" <<
"Jac=" << std::endl << WorkMat << std::endl;
void PutColIndex(integer iSubCol, integer iCol)
const Vec3 Zero3(0., 0., 0.)
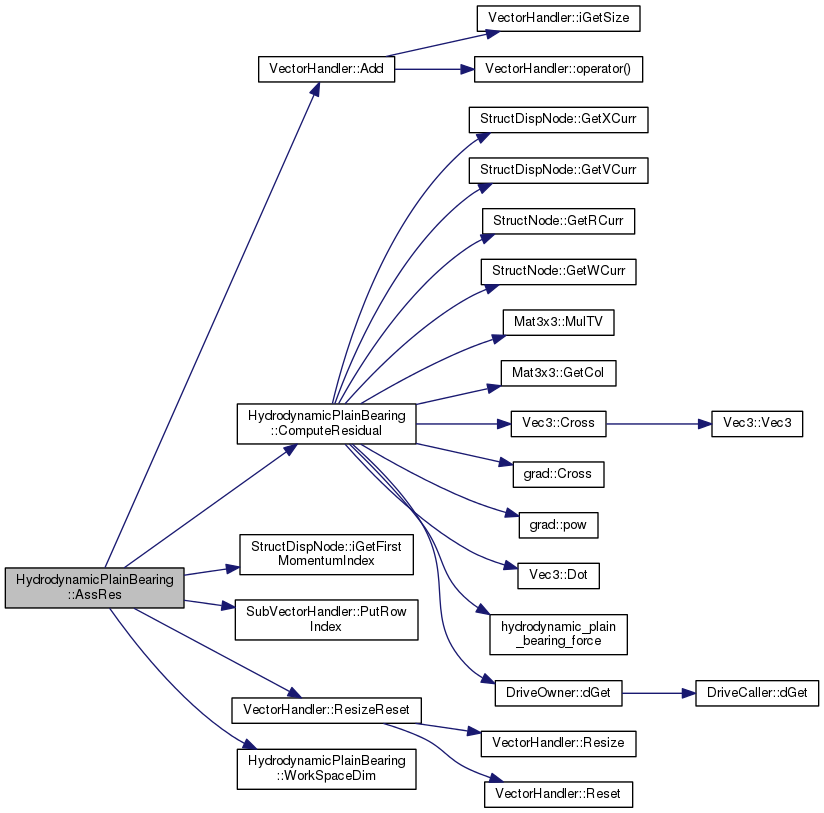
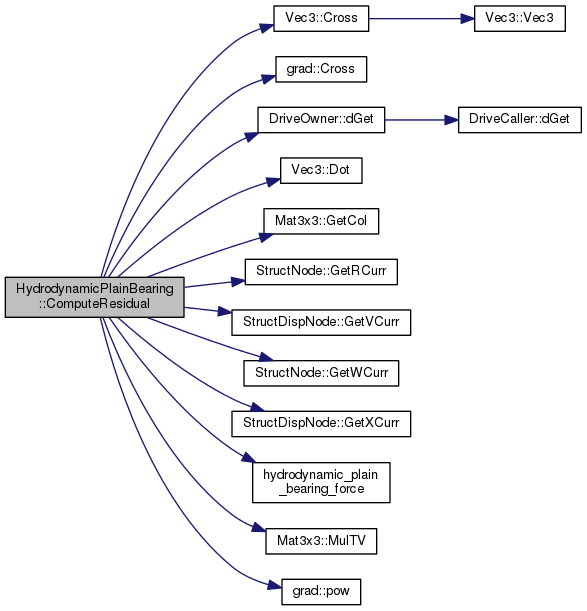
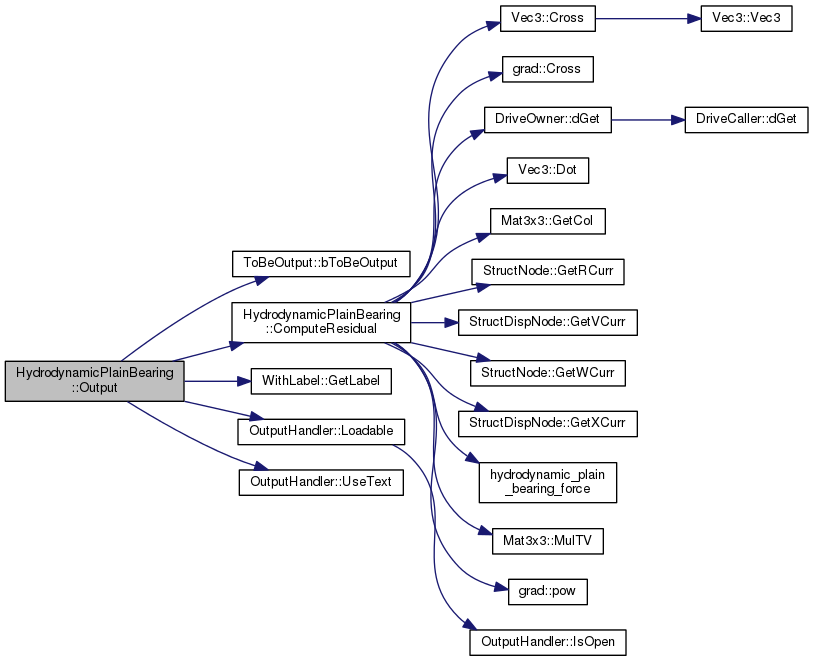
Vec3 Cross(const Vec3 &v) const
virtual const Mat3x3 & GetRRef(void) const
GradientExpression< BinaryExpr< FuncPow, LhsExpr, RhsExpr > > pow(const GradientExpression< LhsExpr > &u, const GradientExpression< RhsExpr > &v)
const MatCross_Manip MatCross
FullSubMatrixHandler & SetFull(void)
virtual const Mat3x3 & GetRCurr(void) const
doublereal Dot(const Vec3 &v) const
virtual void WorkSpaceDim(integer *piNumRows, integer *piNumCols) const
const Mat3x3 Eye3(1., 0., 0., 0., 1., 0., 0., 0., 1.)
Vec3 GetCol(unsigned short int i) const
virtual const Vec3 & GetWRef(void) const
const StructNode * m_pShaft
static const int NBDIRSMAX
Vec3 MulTV(const Vec3 &v) const
const doublereal * m_alpha
const StructNode * m_pBearing
Vec3 GetRow(unsigned short int i) const
integer m_iNumGaussPoints
virtual integer iGetFirstMomentumIndex(void) const =0
virtual integer iGetFirstPositionIndex(void) const
virtual const Vec3 & GetWCurr(void) const
Mat3x3 Tens(const Vec3 &v) const
Mat3x3 MulTM(const Mat3x3 &m) const
VectorExpression< VectorCrossExpr< VectorLhsExpr, VectorRhsExpr >, 3 > Cross(const VectorExpression< VectorLhsExpr, 3 > &u, const VectorExpression< VectorRhsExpr, 3 > &v)
virtual const Vec3 & GetXCurr(void) const
virtual void ResizeReset(integer, integer)
DriveOwner m_InitialAssemblyFactor
Mat3x3 Transpose(void) const
void PutRowIndex(integer iSubRow, integer iRow)
doublereal dGet(const doublereal &dVar) const
void hydrodynamic_plain_bearing_force_dv(const bearing_data &bdat, const doublereal omega[2], const doublereal omegad[2][NBDIRSMAX], const doublereal e[2], const doublereal ed[2][NBDIRSMAX], const doublereal e_dot[2], const doublereal e_dotd[2][NBDIRSMAX], doublereal k[3], doublereal kd[3][NBDIRSMAX], doublereal &eps, doublereal &eps_dot, doublereal &delta, doublereal &SoD, doublereal &SoV, doublereal &my, doublereal &beta, const int &nbdirs)
virtual const Vec3 & GetVCurr(void) const
void Sub(integer iRow, integer iCol, const Vec3 &v)
 Public Member Functions inherited from Elem
Public Member Functions inherited from Elem



 1.8.7
1.8.7 
