|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
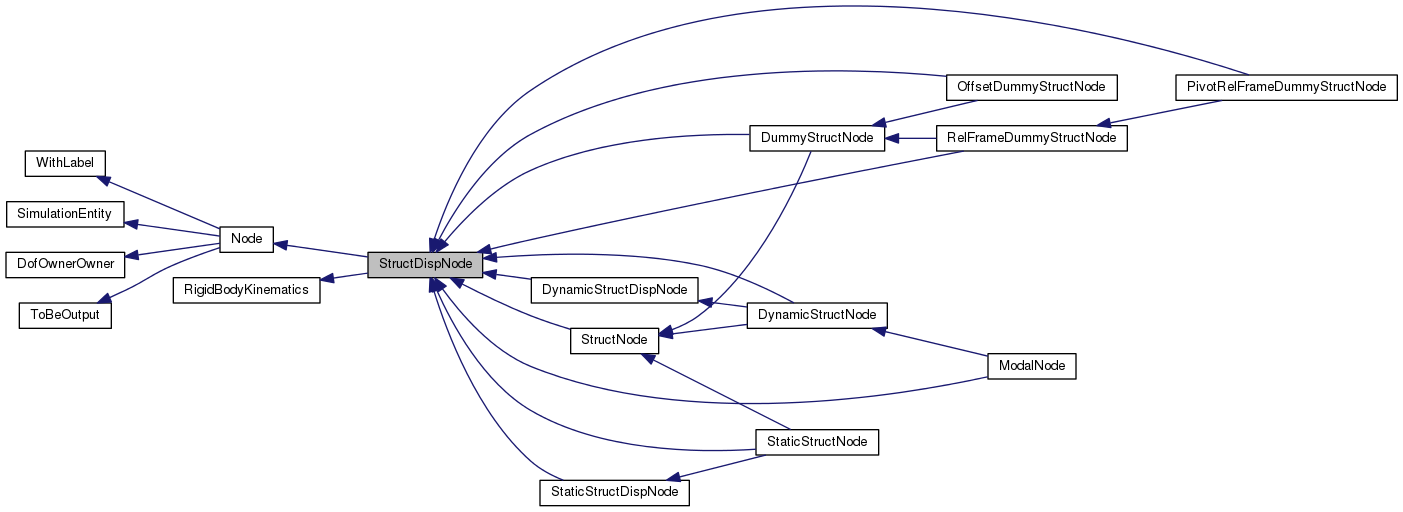
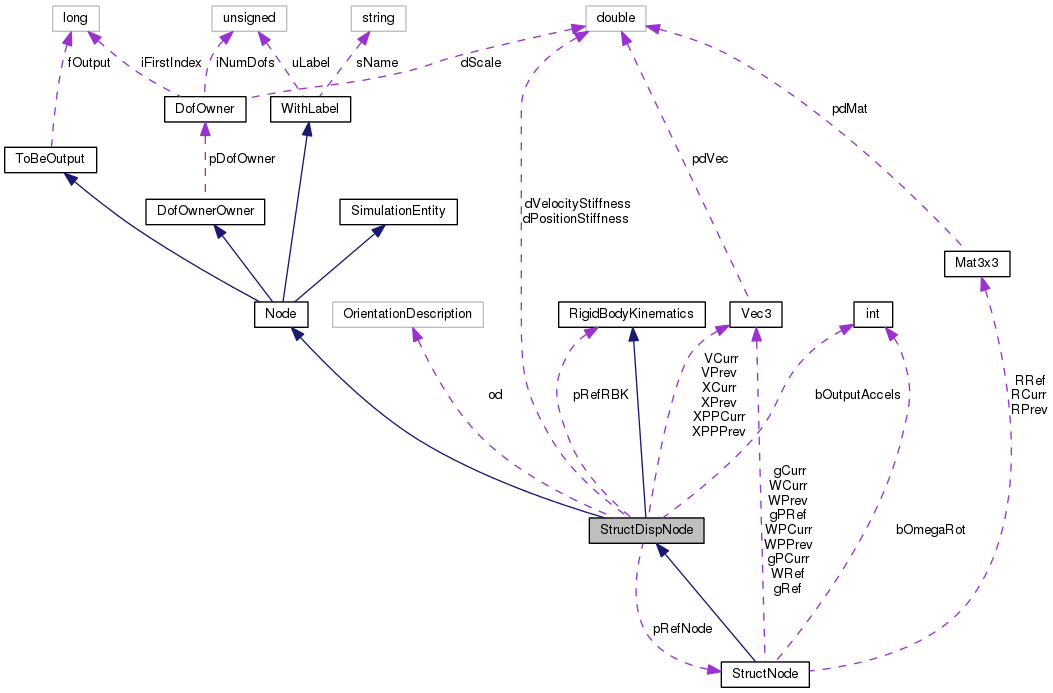
#include <strnode.h>
Classes | |
| class | ErrGeneric |
Public Types | |
| enum | Type { UNKNOWN = -1, DYNAMIC = 0, STATIC, LASTSTRUCTDISPNODETYPE } |
| enum | Output { OUTPUT_ACCELERATIONS = (ToBeOutput::OUTPUT_PRIVATE << 0), OUTPUT_INERTIA = (ToBeOutput::OUTPUT_PRIVATE << 1) } |
 Public Types inherited from Node Public Types inherited from Node | |
| enum | Type { UNKNOWN = -1, ABSTRACT = 0, STRUCTURAL, ELECTRIC, THERMAL, PARAMETER, HYDRAULIC, LASTNODETYPE } |
| Public Types inherited from SimulationEntity | |
| typedef std::vector< Hint * > | Hints |
| Public Types inherited from ToBeOutput | |
| enum | { OUTPUT = 0x1U, OUTPUT_MASK = 0xFU, OUTPUT_PRIVATE = 0x10U, OUTPUT_PRIVATE_MASK = ~OUTPUT_MASK } |
Public Member Functions | |
| StructDispNode (unsigned int uL, const DofOwner *pDO, const Vec3 &X0, const Vec3 &V0, const StructNode *pRN, const RigidBodyKinematics *pRBK, doublereal dPosStiff, doublereal dVelStiff, OrientationDescription od, flag fOut) | |
| virtual | ~StructDispNode (void) |
| virtual Node::Type | GetNodeType (void) const |
| const RigidBodyKinematics * | pGetRBK (void) const |
| const Vec3 & | GetX (void) const |
| const Mat3x3 & | GetR (void) const |
| const Vec3 & | GetV (void) const |
| const Vec3 & | GetW (void) const |
| const Vec3 & | GetXPP (void) const |
| const Vec3 & | GetWP (void) const |
| virtual integer | iGetFirstPositionIndex (void) const |
| virtual integer | iGetFirstMomentumIndex (void) const =0 |
| virtual StructDispNode::Type | GetStructDispNodeType (void) const =0 |
| virtual std::ostream & | Restart (std::ostream &out) const |
| virtual std::ostream & | DescribeDof (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeDof (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual std::ostream & | DescribeEq (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeEq (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual const doublereal & | dGetDofValue (int iDof, int iOrder=0) const |
| virtual const doublereal & | dGetDofValuePrev (int iDof, int iOrder=0) const |
| virtual void | SetDofValue (const doublereal &dValue, unsigned int iDof, unsigned int iOrder=0) |
| virtual DofOrder::Order | GetDofType (unsigned int) const |
| virtual const Vec3 & | GetXPrev (void) const |
| virtual const Vec3 & | GetXCurr (void) const |
| virtual const Vec3 & | GetVPrev (void) const |
| virtual const Vec3 & | GetVCurr (void) const |
| virtual const Vec3 & | GetXPPPrev (void) const |
| virtual const Vec3 & | GetXPPCurr (void) const |
| virtual const doublereal & | dGetPositionStiffness (void) const |
| virtual const doublereal & | dGetVelocityStiffness (void) const |
| virtual bool | ComputeAccelerations (bool b) |
| virtual bool | bComputeAccelerations (void) const |
| virtual bool | bOutputAccelerations (void) const |
| virtual void | OutputAccelerations (bool bOut) |
| virtual void | OutputPrepare (OutputHandler &OH) |
| virtual void | Output (OutputHandler &OH) const |
| virtual void | Update (const VectorHandler &X, const VectorHandler &XP) |
| virtual void | DerivativesUpdate (const VectorHandler &X, const VectorHandler &XP) |
| virtual unsigned int | iGetInitialNumDof (void) const |
| virtual void | InitialUpdate (const VectorHandler &X) |
| void | Update (const VectorHandler &X, InverseDynamics::Order iOrder) |
| virtual void | SetInitialValue (VectorHandler &X) |
| virtual void | SetValue (DataManager *pDM, VectorHandler &X, VectorHandler &XP, SimulationEntity::Hints *ph=0) |
| virtual void | BeforePredict (VectorHandler &X, VectorHandler &XP, VectorHandler &XPrev, VectorHandler &XPPrev) const |
| virtual void | AfterPredict (VectorHandler &X, VectorHandler &XP) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP, const VectorHandler &XPP) |
| virtual unsigned int | iGetNumPrivData (void) const |
| virtual unsigned int | iGetPrivDataIdx (const char *s) const |
| virtual doublereal | dGetPrivData (unsigned int i) const |
| Public Member Functions inherited from Node | |
| Node (unsigned int uL, const DofOwner *pDO, flag fOut) | |
| virtual | ~Node (void) |
| const Node * | GetNode (void) const |
| virtual integer | iGetFirstRowIndex (void) const |
| virtual integer | iGetFirstColIndex (void) const |
| Public Member Functions inherited from WithLabel | |
| WithLabel (unsigned int uL=0, const std::string &sN="") | |
| virtual | ~WithLabel (void) |
| void | PutLabel (unsigned int uL) |
| void | PutName (const std::string &sN) |
| unsigned int | GetLabel (void) const |
| const std::string & | GetName (void) const |
| Public Member Functions inherited from SimulationEntity | |
| SimulationEntity (void) | |
| virtual | ~SimulationEntity (void) |
| virtual unsigned int | iGetNumDof (void) const =0 |
| virtual bool | bIsValidIndex (unsigned int i) const |
| virtual DofOrder::Order | GetEqType (unsigned int i) const |
| virtual Hint * | ParseHint (DataManager *pDM, const char *s) const |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP) |
| virtual std::ostream & | OutputAppend (std::ostream &out) const |
| virtual void | ReadInitialState (MBDynParser &HP) |
| Public Member Functions inherited from DofOwnerOwner | |
| DofOwnerOwner (const DofOwner *pDO) | |
| virtual | ~DofOwnerOwner () |
| virtual const DofOwner * | pGetDofOwner (void) const |
| virtual integer | iGetFirstIndex (void) const |
| Public Member Functions inherited from ToBeOutput | |
| ToBeOutput (flag fOut=fDefaultOut) | |
| virtual | ~ToBeOutput (void) |
| virtual void | Output (OutputHandler &OH, const VectorHandler &X, const VectorHandler &XP) const |
| virtual flag | fToBeOutput (void) const |
| virtual bool | bToBeOutput (void) const |
| virtual void | SetOutputFlag (flag f=flag(1)) |
| Public Member Functions inherited from RigidBodyKinematics | |
| virtual | ~RigidBodyKinematics (void) |
| virtual void | Update (void) |
Protected Attributes | |
| Vec3 | XPrev |
| Vec3 | XCurr |
| Vec3 | VPrev |
| Vec3 | VCurr |
| Vec3 | XPPCurr |
| Vec3 | XPPPrev |
| const StructNode * | pRefNode |
| OrientationDescription | od |
| doublereal | dPositionStiffness |
| doublereal | dVelocityStiffness |
| const RigidBodyKinematics * | pRefRBK |
| bool | bOutputAccels |
| Protected Attributes inherited from WithLabel | |
| unsigned int | uLabel |
| std::string | sName |
| Protected Attributes inherited from ToBeOutput | |
| flag | fOutput |
| Enumerator | |
|---|---|
| OUTPUT_ACCELERATIONS | |
| OUTPUT_INERTIA | |
| enum StructDispNode::Type |
| Enumerator | |
|---|---|
| UNKNOWN | |
| DYNAMIC | |
| STATIC | |
| LASTSTRUCTDISPNODETYPE | |
| StructDispNode::StructDispNode | ( | unsigned int | uL, |
| const DofOwner * | pDO, | ||
| const Vec3 & | X0, | ||
| const Vec3 & | V0, | ||
| const StructNode * | pRN, | ||
| const RigidBodyKinematics * | pRBK, | ||
| doublereal | dPosStiff, | ||
| doublereal | dVelStiff, | ||
| OrientationDescription | od, | ||
| flag | fOut | ||
| ) |
|
virtual |
Definition at line 138 of file strnode.cc.
References NO_OP.
|
virtual |
Reimplemented from SimulationEntity.
Reimplemented in StructNode.
Definition at line 789 of file strnode.cc.
References VCurr, VPrev, XCurr, XPPCurr, XPPPrev, and XPrev.
|
virtual |
Reimplemented from SimulationEntity.
Reimplemented in DummyStructNode, and StructNode.
Definition at line 731 of file strnode.cc.
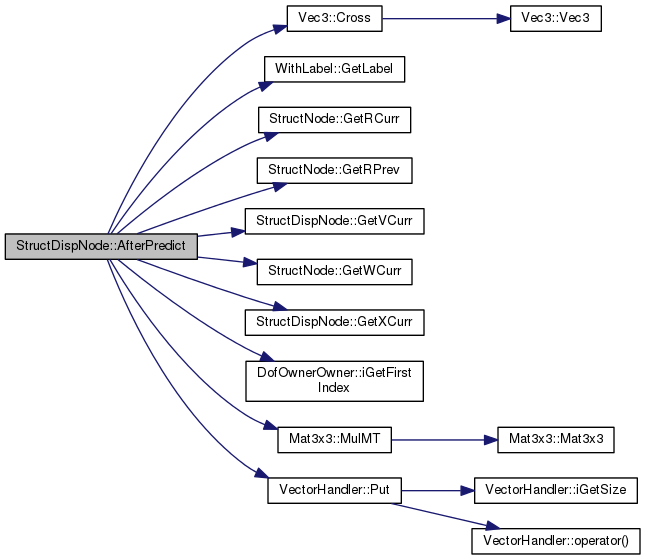
References Vec3::Cross(), WithLabel::GetLabel(), StructNode::GetRCurr(), StructNode::GetRPrev(), GetVCurr(), StructNode::GetWCurr(), GetXCurr(), DofOwnerOwner::iGetFirstIndex(), CGR_Rot::MatGm1, Mat3x3::MulMT(), CGR_Rot::Param, pRefNode, VectorHandler::Put(), VCurr, and XCurr.
|
inlinevirtual |
Reimplemented in PivotRelFrameDummyStructNode, RelFrameDummyStructNode, DummyStructNode, and DynamicStructDispNode.
Definition at line 433 of file strnode.h.
Referenced by DynamicStructNode::AddInertia(), DynamicStructNode::AfterConvergence(), DynamicStructNode::BeforePredict(), DynamicStructNode::dGetDofValue(), DynamicStructNode::dGetDofValuePrev(), dGetPrivData(), StructNode::dGetPrivData(), iGetNumPrivData(), StructNode::iGetNumPrivData(), ModuleIMU::ModuleIMU(), DynamicStructNode::SetDofValue(), DynamicStructNode::Update(), and OffsetDummyStructNode::Update_int().
|
virtual |
Reimplemented from SimulationEntity.
Reimplemented in DummyStructNode, DynamicStructNode, StructNode, and DynamicStructDispNode.
Definition at line 680 of file strnode.cc.
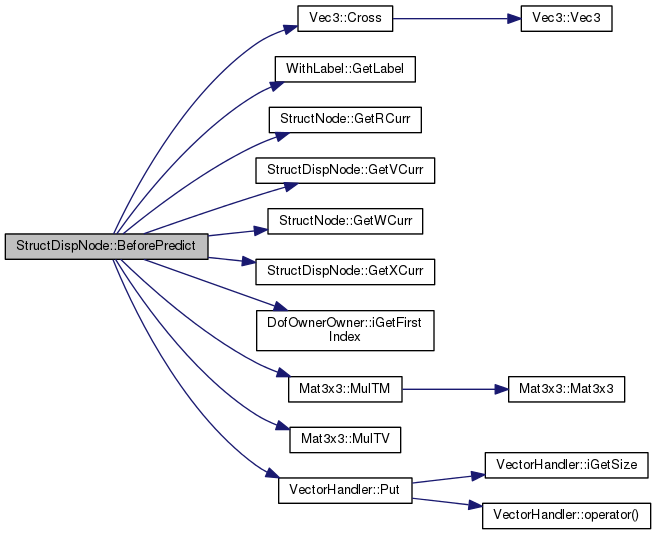
References Vec3::Cross(), WithLabel::GetLabel(), StructNode::GetRCurr(), GetVCurr(), StructNode::GetWCurr(), GetXCurr(), DofOwnerOwner::iGetFirstIndex(), Mat3x3::MulTM(), Mat3x3::MulTV(), pRefNode, VectorHandler::Put(), VCurr, VPrev, XCurr, and XPrev.
Referenced by DynamicStructDispNode::BeforePredict().
|
inlinevirtual |
Definition at line 439 of file strnode.h.
References bOutputAccels.
Referenced by OffsetDummyStructNode::OffsetDummyStructNode(), PivotRelFrameDummyStructNode::PivotRelFrameDummyStructNode(), and RelFrameDummyStructNode::RelFrameDummyStructNode().
Reimplemented in PivotRelFrameDummyStructNode, RelFrameDummyStructNode, DummyStructNode, and DynamicStructDispNode.
Definition at line 194 of file strnode.cc.
Referenced by DynamicStructNode::AfterConvergence(), DynamicStructNode::dGetDofValue(), GetDofOrder(), iGetPrivDataIdx(), StructNode::iGetPrivDataIdx(), ModalNode::ModalNode(), and DynamicStructNode::Update().
|
virtual |
Reimplemented from SimulationEntity.
Reimplemented in DummyStructNode, and StructNode.
Definition at line 582 of file strnode.cc.
References DofOwnerOwner::iGetFirstIndex(), VCurr, and XCurr.

|
virtual |
Reimplemented from Node.
Reimplemented in ModalNode, DynamicStructNode, StructNode, and DynamicStructDispNode.
Definition at line 200 of file strnode.cc.
References DofOwnerOwner::iGetFirstIndex().
Referenced by DynamicStructDispNode::DescribeDof(), and DataManager::InitialJointAssembly().

|
virtual |
Reimplemented from Node.
Reimplemented in ModalNode, DynamicStructNode, StructNode, and DynamicStructDispNode.
Definition at line 219 of file strnode.cc.
References WithLabel::GetLabel(), MBDYN_EXCEPT_ARGS, sdn_initial_dof, and xyz.

|
virtual |
Reimplemented from Node.
Reimplemented in ModalNode, DynamicStructNode, StructNode, and DynamicStructDispNode.
Definition at line 259 of file strnode.cc.
References DofOwnerOwner::iGetFirstIndex().
Referenced by DynamicStructDispNode::DescribeEq(), and DataManager::InitialJointAssembly().

|
virtual |
Reimplemented from Node.
Reimplemented in ModalNode, DynamicStructNode, StructNode, and DynamicStructDispNode.
Definition at line 283 of file strnode.cc.
References WithLabel::GetLabel(), MBDYN_EXCEPT_ARGS, sdn_eq, sdn_initial_eq, and xyz.

|
virtual |
Implements Node.
Reimplemented in DummyStructNode, DynamicStructNode, StructNode, and DynamicStructDispNode.
Definition at line 372 of file strnode.cc.
References ASSERT, WithLabel::GetLabel(), MBDYN_EXCEPT_ARGS, VCurr, and XCurr.
Referenced by DynamicStructDispNode::dGetDofValue().

|
virtual |
Implements Node.
Reimplemented in DummyStructNode, DynamicStructNode, StructNode, and DynamicStructDispNode.
Definition at line 397 of file strnode.cc.
References ASSERT, WithLabel::GetLabel(), MBDYN_EXCEPT_ARGS, VPrev, and XPrev.
Referenced by DynamicStructDispNode::dGetDofValuePrev().

|
inlinevirtual |
Definition at line 421 of file strnode.h.
References dPositionStiffness.
Referenced by DataManager::InitialJointAssembly().
|
virtual |
Reimplemented from Node.
Reimplemented in StructNode.
Definition at line 980 of file strnode.cc.
References ASSERT, bComputeAccelerations(), MBDYN_EXCEPT_ARGS, VCurr, XCurr, and XPPCurr.

|
inlinevirtual |
Definition at line 427 of file strnode.h.
References dVelocityStiffness.
Referenced by DataManager::InitialJointAssembly().
|
virtual |
Implements SimulationEntity.
Definition at line 362 of file strnode.cc.
References ASSERT, DofOrder::DIFFERENTIAL, and SimulationEntity::iGetNumDof().

|
virtual |
Implements Node.
Definition at line 145 of file strnode.cc.
References Node::STRUCTURAL.
Referenced by Actuator::Actuator(), AerodynamicBody::AerodynamicBody(), AerodynamicModal::AerodynamicModal(), Beam::Beam(), Beam2::Beam2(), Body::Body(), ContactJoint::ContactJoint(), DeformableAxialJoint::DeformableAxialJoint(), DeformableDispJoint::DeformableDispJoint(), DeformableHingeJoint::DeformableHingeJoint(), DeformableJoint::DeformableJoint(), DispMeasure::DispMeasure(), DistanceJointWithOffset::DistanceJointWithOffset(), DriveDisplacementJoint::DriveDisplacementJoint(), DriveDisplacementPinJoint::DriveDisplacementPinJoint(), DriveHingeJoint::DriveHingeJoint(), Beam::DsDxi(), GimbalRotationJoint::GimbalRotationJoint(), HBeam::HBeam(), DataManager::InitialJointAssembly(), Mass::Mass(), Beam::Omega0(), PointSurfaceContact::PointSurfaceContact(), PrismaticJoint::PrismaticJoint(), Rod::Rod(), RodBezier::RodBezier(), RodWithOffset::RodWithOffset(), RotAccel::RotAccel(), StructuralForce::StructuralForce(), StructuralInternalForce::StructuralInternalForce(), TranslAccel::TranslAccel(), VariableBody::VariableBody(), and ViscousBody::ViscousBody().
|
virtual |
Implements RigidBodyKinematics.
Reimplemented in StructNode.
Definition at line 164 of file strnode.cc.
References Eye3.
|
pure virtual |
Implemented in DummyStructNode, StaticStructDispNode, and DynamicStructDispNode.
Referenced by DataManager::DofOwnerInit(), OutputPrepare(), and Restart().
|
virtual |
Implements RigidBodyKinematics.
Definition at line 170 of file strnode.cc.
References GetVCurr().

|
inlinevirtual |
Definition at line 322 of file strnode.h.
References VCurr.
Referenced by ModuleNonsmoothNode::AfterPredict(), ViscousBody::AfterPredict(), AfterPredict(), ViscoElasticBeam2::AfterPredict(), ViscousDispJoint::AfterPredict(), ViscousJoint::AfterPredict(), ViscoElasticDispJoint::AfterPredict(), ViscoElasticJoint::AfterPredict(), ViscoElasticBeam::AfterPredict(), StructNode::AfterPredict(), DataManager::AssConstrRes(), HydrodynamicPlainBearing::AssJac(), Accelerometer::AssJac(), InlineFriction::AssJac(), ContactJoint::AssJac(), Actuator::AssJac(), TranslAccel::AssJac(), AerodynamicModal::AssJac(), TotalEquation::AssJac(), TotalJoint::AssJac(), ViscoElasticRod::AssJac(), AutomaticStructElem::AssJac(), AerodynamicBody::AssJac(), RodWithOffset::AssJac(), ModuleIMUConstraint::AssJac(), DeformableDispJoint::AssMatFDEPrime(), DynamicVariableBody::AssMats(), AutomaticStructElem::AssMats(), DynamicBody::AssMats(), VariableBody::AssMatsRBK_int(), Body::AssMatsRBK_int(), Accelerometer::AssRes(), LinearAccelerationJoint::AssRes(), InlineFriction::AssRes(), LinearVelocityJoint::AssRes(), Actuator::AssRes(), Wheel2::AssRes(), TranslAccel::AssRes(), ContactJoint::AssRes(), DynamicMass::AssRes(), DynamicVariableBody::AssRes(), AerodynamicModal::AssRes(), ModuleNonsmoothNode::AssRes(), TotalEquation::AssRes(), TotalJoint::AssRes(), ViscoElasticRod::AssRes(), AutomaticStructElem::AssRes(), Modal::AssRes(), Wheel4::AssRes(), DynamicBody::AssRes(), ModuleIMUConstraint::AssRes(), TotalPinJoint::AssRes(), ViscoElasticBeam2::AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), ViscousBody::AssVec(), Rod::AssVec(), GenericAerodynamicForce::AssVec(), RodBezier::AssVec(), AerodynamicModal::AssVec(), AerodynamicBody::AssVec(), RodWithOffset::AssVec(), ViscousDispJoint::AssVec(), ViscousJoint::AssVec(), ViscoElasticJoint::AssVec(), ViscoElasticDispJoint::AssVec(), VariableBody::AssVecRBK_int(), Body::AssVecRBK_int(), BeforePredict(), StructNode::BeforePredict(), AutomaticStructElem::ComputeAccelerations(), HydrodynamicPlainBearing::ComputeResidual(), NodeDistDriveCaller::dGetP(), InlineFriction::dGetPrivData(), Mass::dGetPrivData(), VariableBody::dGetPrivData(), ViscousBody::dGetPrivData(), DeformableDispJoint::dGetPrivData(), DeformableJoint::dGetPrivData(), AutomaticStructDispElem::dGetPrivData(), TotalEquation::dGetPrivData(), TotalJoint::dGetPrivData(), AutomaticStructElem::dGetPrivData(), Body::dGetPrivData(), Modal::dGetPrivData(), TotalReaction::dGetPrivData(), TotalPinJoint::dGetPrivData(), DynamicMass::GetB_int(), DynamicVariableBody::GetB_int(), Modal::GetB_int(), DynamicBody::GetB_int(), Modal::GetCurrFEMNodesVelocity(), DynamicVariableBody::GetG_int(), DynamicBody::GetG_int(), GetV(), PosRel::GetVelGlob(), getvnvt(), InlineFriction::InitialAssJac(), DistanceJoint::InitialAssJac(), InLineJoint::InitialAssJac(), InPlaneJoint::InitialAssJac(), InLineWithOffsetJoint::InitialAssJac(), TotalEquation::InitialAssJac(), InPlaneWithOffsetJoint::InitialAssJac(), TotalJoint::InitialAssJac(), ViscoElasticRod::InitialAssJac(), RodWithOffset::InitialAssJac(), TotalReaction::InitialAssJac(), TotalPinJoint::InitialAssJac(), TotalForce::InitialAssJac(), InlineFriction::InitialAssRes(), DistanceJoint::InitialAssRes(), LinearVelocityJoint::InitialAssRes(), InLineJoint::InitialAssRes(), UniversalHingeJoint::InitialAssRes(), InPlaneJoint::InitialAssRes(), SphericalHingeJoint::InitialAssRes(), DriveDisplacementJoint::InitialAssRes(), PlaneHingeJoint::InitialAssRes(), InLineWithOffsetJoint::InitialAssRes(), AerodynamicModal::InitialAssRes(), DistanceJointWithOffset::InitialAssRes(), PinJoint::InitialAssRes(), TotalEquation::InitialAssRes(), InPlaneWithOffsetJoint::InitialAssRes(), TotalJoint::InitialAssRes(), ViscoElasticRod::InitialAssRes(), DriveDisplacementPinJoint::InitialAssRes(), UniversalPinJoint::InitialAssRes(), Modal::InitialAssRes(), ClampJoint::InitialAssRes(), TotalReaction::InitialAssRes(), TotalPinJoint::InitialAssRes(), AxialRotationJoint::InitialAssRes(), TotalForce::InitialAssRes(), ViscoElasticDispJoint::InitialAssRes(), PlanePinJoint::InitialAssRes(), DataManager::InitialJointAssembly(), Rotor::InitParam(), ModuleNonsmoothNode::ModuleNonsmoothNode(), StructExtForce::Output(), TotalEquation::Output(), TotalJoint::Output(), TotalReaction::Output(), TotalPinJoint::Output(), ModalMappingExt::Send(), ModalExt::Send(), StructExtForce::SendToFileDes(), StructMappingExtForce::SendToFileDes(), StructMembraneMappingExtForce::SendToFileDes(), StructExtEDGEForce::SendToStream(), StructExtForce::SendToStream(), StructMappingExtForce::SendToStream(), StructMembraneMappingExtForce::SendToStream(), DistanceJointWithOffset::SetInitialValue(), Modal::SetInitialValue(), DispMeasure::SetValue(), Accelerometer::SetValue(), LinearAccelerationJoint::SetValue(), TranslAccel::SetValue(), DynamicMass::SetValue(), DynamicVariableBody::SetValue(), SetValue(), Modal::SetValue(), ModuleIMUConstraint::SetValue(), DynamicBody::SetValue(), StructNode::SetValue(), AircraftInstruments::Update(), OffsetDummyStructNode::Update_int(), RelFrameDummyStructNode::Update_int(), PivotRelFrameDummyStructNode::Update_int(), velocity(), and vrel().
|
inlinevirtual |
Definition at line 316 of file strnode.h.
References VPrev.
Referenced by DataManager::AssConstrRes(), ModuleNonsmoothNode::AssRes(), DataManager::InitialJointAssembly(), velocity(), and vrel().
|
virtual |
Implements RigidBodyKinematics.
Reimplemented in StructNode.
Definition at line 176 of file strnode.cc.
References Zero3.
|
virtual |
Implements RigidBodyKinematics.
Reimplemented in DynamicStructNode, and StructNode.
Definition at line 188 of file strnode.cc.
References Zero3.
|
virtual |
Implements RigidBodyKinematics.
Definition at line 158 of file strnode.cc.
References GetXCurr().
Referenced by DataManager::OutputEigGeometry().

|
inlinevirtual |
Definition at line 310 of file strnode.h.
References XCurr.
Referenced by CyclocopterUniform1D::AddForce(), CyclocopterUniform2D::AddForce(), CyclocopterPolimi::AddForce(), AerodynamicModal::AerodynamicModal(), AeroDynModule::AeroDynModule(), Wheel4::AfterConvergence(), ModuleNonsmoothNode::AfterPredict(), ElasticDispJoint::AfterPredict(), HBeam::AfterPredict(), Beam2::AfterPredict(), ElasticJoint::AfterPredict(), AfterPredict(), ElasticDispJointInv::AfterPredict(), Beam::AfterPredict(), ElasticJointInv::AfterPredict(), ViscoElasticBeam2::AfterPredict(), ViscousDispJoint::AfterPredict(), ViscousJoint::AfterPredict(), ViscoElasticDispJoint::AfterPredict(), ViscoElasticJoint::AfterPredict(), ViscoElasticBeam::AfterPredict(), StructNode::AfterPredict(), DataManager::AssConstrRes(), HydrodynamicPlainBearing::AssJac(), InlineFriction::AssJac(), InLineJoint::AssJac(), InPlaneJoint::AssJac(), ContactJoint::AssJac(), Actuator::AssJac(), RodBezier::AssJac(), DynamicMass::AssJac(), DynamicVariableBody::AssJac(), AerodynamicModal::AssJac(), InLineWithOffsetJoint::AssJac(), TotalEquation::AssJac(), TotalJoint::AssJac(), InPlaneWithOffsetJoint::AssJac(), AerodynamicBody::AssJac(), TotalReaction::AssJac(), DynamicBody::AssJac(), AerodynamicBeam::AssJac(), ModalBody::AssJac(), AerodynamicBeam2::AssJac(), TotalForce::AssJac(), DeformableJoint::AssMatCommon(), DynamicMass::AssMats(), DynamicVariableBody::AssMats(), ElasticDispJoint::AssMats(), StaticMass::AssMats(), StaticVariableBody::AssMats(), ElasticDispJointInv::AssMats(), DynamicBody::AssMats(), ViscousDispJoint::AssMats(), ModalBody::AssMats(), StaticBody::AssMats(), ViscoElasticDispJoint::AssMats(), VariableBody::AssMatsRBK_int(), Body::AssMatsRBK_int(), DispMeasure::AssRes(), InlineFriction::AssRes(), InLineJoint::AssRes(), DistanceJoint::AssRes(), UniversalHingeJoint::AssRes(), SphericalHingeJoint::AssRes(), InPlaneJoint::AssRes(), Actuator::AssRes(), Wheel2::AssRes(), StructExtForce::AssRes(), StructMappingExtForce::AssRes(), Brake::AssRes(), ContactJoint::AssRes(), PlaneHingeJoint::AssRes(), DynamicMass::AssRes(), DynamicVariableBody::AssRes(), BeamSliderJoint::AssRes(), AerodynamicModal::AssRes(), ModuleNonsmoothNode::AssRes(), InLineWithOffsetJoint::AssRes(), TotalEquation::AssRes(), TotalJoint::AssRes(), DistanceJointWithOffset::AssRes(), PinJoint::AssRes(), AeroDynModule::AssRes(), InPlaneWithOffsetJoint::AssRes(), StaticMass::AssRes(), ViscoElasticRod::AssRes(), StaticVariableBody::AssRes(), UniversalPinJoint::AssRes(), UniformRotor::AssRes(), Modal::AssRes(), ClampJoint::AssRes(), Wheel4::AssRes(), TotalReaction::AssRes(), DynamicBody::AssRes(), TotalPinJoint::AssRes(), ModalBody::AssRes(), AxialRotationJoint::AssRes(), ManglerRotor::AssRes(), StaticBody::AssRes(), TotalForce::AssRes(), PlanePinJoint::AssRes(), DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), Beam2::AssStiffnessMat(), HBeam::AssStiffnessMat(), Beam::AssStiffnessMat(), ViscoElasticBeam2::AssStiffnessMat(), ViscoElasticBeam::AssStiffnessMat(), Beam2::AssStiffnessVec(), HBeam::AssStiffnessVec(), Beam::AssStiffnessVec(), ViscoElasticBeam2::AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), DriveDisplacementJoint::AssVec(), PointSurfaceContact::AssVec(), Rod::AssVec(), GenericAerodynamicForce::AssVec(), RodBezier::AssVec(), AerodynamicModal::AssVec(), ElasticDispJoint::AssVec(), DriveDisplacementPinJoint::AssVec(), ElasticJoint::AssVec(), AerodynamicBody::AssVec(), ElasticDispJointInv::AssVec(), RodWithOffset::AssVec(), ElasticJointInv::AssVec(), AerodynamicBeam::AssVec(), ViscousDispJoint::AssVec(), ViscousJoint::AssVec(), AerodynamicBeam2::AssVec(), ViscoElasticJoint::AssVec(), ViscoElasticDispJoint::AssVec(), Mass::AssVecRBK_int(), VariableBody::AssVecRBK_int(), Body::AssVecRBK_int(), BeforePredict(), StructNode::BeforePredict(), Shell4EAS::ComputeInitialNodeAndIptOrientation(), Shell4EASANS::ComputeInitialNodeOrientation(), HydrodynamicPlainBearing::ComputeResidual(), ContactJoint::ContactJoint(), NodeDistDriveCaller::dGet(), NodeDistDriveCaller::dGetP(), InlineFriction::dGetPrivData(), Mass::dGetPrivData(), VariableBody::dGetPrivData(), DeformableDispJoint::dGetPrivData(), DeformableJoint::dGetPrivData(), TotalEquation::dGetPrivData(), TotalJoint::dGetPrivData(), Body::dGetPrivData(), Modal::dGetPrivData(), TotalReaction::dGetPrivData(), TotalPinJoint::dGetPrivData(), distance(), HBeam::DsDxi(), Beam2::DsDxi(), Beam::DsDxi(), Modal::GetCurrFEMNodesPosition(), RotorTrimGeneric::GetData(), getelemparams(), DynamicVariableBody::GetG_int(), DynamicBody::GetG_int(), CyclocopterPolimi::GetInducedVelocity(), Mass::GetJ_int(), VariableBody::GetJ_int(), Modal::GetJ_int(), Body::GetJ_int(), PosRel::GetPosGlob(), Mass::GetS_int(), VariableBody::GetS_int(), Modal::GetS_int(), Body::GetS_int(), MBDynParser::GetVecAbs(), MBDynParser::GetVecRel(), GetX(), Rotor::GetXCurr(), InducedVelocity::GetXCurr(), Beam::Init(), InlineFriction::InitialAssJac(), InLineJoint::InitialAssJac(), InPlaneJoint::InitialAssJac(), RodBezier::InitialAssJac(), InLineWithOffsetJoint::InitialAssJac(), TotalEquation::InitialAssJac(), InPlaneWithOffsetJoint::InitialAssJac(), TotalJoint::InitialAssJac(), TotalReaction::InitialAssJac(), TotalForce::InitialAssJac(), InlineFriction::InitialAssRes(), DistanceJoint::InitialAssRes(), InLineJoint::InitialAssRes(), UniversalHingeJoint::InitialAssRes(), InPlaneJoint::InitialAssRes(), SphericalHingeJoint::InitialAssRes(), DriveDisplacementJoint::InitialAssRes(), PlaneHingeJoint::InitialAssRes(), DynamicVariableBody::InitialAssRes(), InLineWithOffsetJoint::InitialAssRes(), DistanceJointWithOffset::InitialAssRes(), AerodynamicModal::InitialAssRes(), PinJoint::InitialAssRes(), TotalEquation::InitialAssRes(), InPlaneWithOffsetJoint::InitialAssRes(), TotalJoint::InitialAssRes(), ViscoElasticRod::InitialAssRes(), DriveDisplacementPinJoint::InitialAssRes(), UniversalPinJoint::InitialAssRes(), ClampJoint::InitialAssRes(), TotalReaction::InitialAssRes(), DynamicBody::InitialAssRes(), TotalPinJoint::InitialAssRes(), AxialRotationJoint::InitialAssRes(), TotalForce::InitialAssRes(), ViscoElasticDispJoint::InitialAssRes(), PlanePinJoint::InitialAssRes(), DataManager::InitialJointAssembly(), Rotor::InitParam(), ModalMappingExt::ModalMappingExt(), ModuleNonsmoothNode::ModuleNonsmoothNode(), AbsoluteDispForce::Output(), DriveDisplacementJoint::Output(), StructExtForce::Output(), AbsoluteInternalDispForce::Output(), TotalEquation::Output(), TotalJoint::Output(), DriveDisplacementPinJoint::Output(), AbsoluteForce::Output(), FollowerForce::Output(), TotalReaction::Output(), TotalPinJoint::Output(), AbsoluteInternalForce::Output(), FollowerInternalForce::Output(), NodeResForces::Pole(), position(), ReadBeam(), ReadBeam2(), ReadHBeam(), ReadJoint(), ReadModal(), ReadStructMappingExtForce(), ReadStructNode(), ModalMappingExt::Recv(), InducedVelocity::ResetForce(), Rod::Rod(), RodBezier::RodBezier(), RodWithOffset::RodWithOffset(), ModalMappingExt::Send(), ModalExt::Send(), StructExtForce::SendToFileDes(), StructMappingExtForce::SendToFileDes(), StructMembraneMappingExtForce::SendToFileDes(), StructExtEDGEForce::SendToStream(), StructExtForce::SendToStream(), StructMappingExtForce::SendToStream(), StructMembraneMappingExtForce::SendToStream(), DistanceJoint::SetInitialValue(), DistanceJointWithOffset::SetInitialValue(), DispMeasure::SetValue(), DriveDisplacementJoint::SetValue(), SphericalHingeJoint::SetValue(), DeformableDispJoint::SetValue(), DistanceJoint::SetValue(), DeformableJoint::SetValue(), PlaneHingeJoint::SetValue(), TotalEquation::SetValue(), TotalJoint::SetValue(), DistanceJointWithOffset::SetValue(), DriveDisplacementPinJoint::SetValue(), SetValue(), TotalReaction::SetValue(), TotalPinJoint::SetValue(), AxialRotationJoint::SetValue(), PlanePinJoint::SetValue(), StructNode::SetValue(), unitvec(), AircraftInstruments::Update(), OffsetDummyStructNode::Update_int(), RelFrameDummyStructNode::Update_int(), PivotRelFrameDummyStructNode::Update_int(), Membrane4EAS::UpdateNodalAndAveragePos(), Shell4EAS::UpdateNodalAndAveragePosAndOrientation(), Shell4EASANS::UpdateNodalAndAveragePosAndOrientation(), and Wheel4::Wheel4().
|
virtual |
Implements RigidBodyKinematics.
Reimplemented in DynamicStructDispNode.
Definition at line 182 of file strnode.cc.
References MBDYN_EXCEPT_ARGS.
|
inlinevirtual |
Definition at line 334 of file strnode.h.
References XPPCurr.
Referenced by ModuleIMU::AssRes(), AerodynamicModal::AssRes(), StaticMass::AssRes(), StaticVariableBody::AssRes(), Modal::AssRes(), StaticBody::AssRes(), Modal::dGetPrivData(), DynamicStructDispNode::GetXPP(), ModalExt::Send(), StructExtForce::SendToFileDes(), StructMappingExtForce::SendToFileDes(), StructMembraneMappingExtForce::SendToFileDes(), StructExtForce::SendToStream(), StructMappingExtForce::SendToStream(), StructMembraneMappingExtForce::SendToStream(), Modal::SetValue(), OffsetDummyStructNode::Update_int(), RelFrameDummyStructNode::Update_int(), and PivotRelFrameDummyStructNode::Update_int().
|
inlinevirtual |
Definition at line 328 of file strnode.h.
References XPPPrev.
Referenced by DataManager::AssConstrRes().
|
inlinevirtual |
Definition at line 304 of file strnode.h.
References XPrev.
Referenced by DataManager::AssConstrRes(), ModuleNonsmoothNode::AssRes(), distance(), DataManager::InitialJointAssembly(), position(), and unitvec().
|
pure virtual |
Implemented in DummyStructNode, StaticStructNode, DynamicStructNode, StaticStructDispNode, and DynamicStructDispNode.
Referenced by HydrodynamicPlainBearing::AssJac(), InLineJoint::AssJac(), InlineFriction::AssJac(), LinearVelocityJoint::AssJac(), DistanceJoint::AssJac(), UniversalHingeJoint::AssJac(), PrismaticJoint::AssJac(), SphericalHingeJoint::AssJac(), InPlaneJoint::AssJac(), ContactJoint::AssJac(), Actuator::AssJac(), asynchronous_machine::AssJac(), RodBezier::AssJac(), GimbalRotationJoint::AssJac(), PiezoActuatorBeam2::AssJac(), Rod::AssJac(), PiezoActuatorBeam::AssJac(), Motor::AssJac(), PointSurfaceContact::AssJac(), DriveDisplacementJoint::AssJac(), ViscousBody::AssJac(), Brake::AssJac(), DriveHingeJoint::AssJac(), DynamicMass::AssJac(), DeformableDispJoint::AssJac(), PlaneHingeJoint::AssJac(), DynamicVariableBody::AssJac(), BeamSliderJoint::AssJac(), ModuleNonsmoothNode::AssJac(), AngularVelocityJoint::AssJac(), InLineWithOffsetJoint::AssJac(), DeformableJoint::AssJac(), TotalJoint::AssJac(), DistanceJointWithOffset::AssJac(), UniversalRotationJoint::AssJac(), PinJoint::AssJac(), InPlaneWithOffsetJoint::AssJac(), ElasticAxialJoint::AssJac(), PiezoActuatorVEBeam2::AssJac(), StaticMass::AssJac(), ViscoElasticRod::AssJac(), ElasticHingeJoint::AssJac(), PiezoActuatorVEBeam::AssJac(), HBeam::AssJac(), AbsoluteForce::AssJac(), StaticVariableBody::AssJac(), Beam2::AssJac(), DriveDisplacementPinJoint::AssJac(), Membrane4EAS::AssJac(), UniversalPinJoint::AssJac(), PlaneRotationJoint::AssJac(), AerodynamicBody::AssJac(), ClampJoint::AssJac(), RodWithOffset::AssJac(), FollowerForce::AssJac(), ViscousAxialJoint::AssJac(), Wheel4::AssJac(), Beam::AssJac(), TotalReaction::AssJac(), Shell4EAS::AssJac(), DynamicBody::AssJac(), ModuleIMUConstraint::AssJac(), TotalPinJoint::AssJac(), AerodynamicBeam::AssJac(), Shell4EASANS::AssJac(), ViscousHingeJoint::AssJac(), FollowerCouple::AssJac(), ViscoElasticAxialJoint::AssJac(), AxialRotationJoint::AssJac(), StaticBody::AssJac(), AerodynamicBeam2::AssJac(), AbsoluteInternalForce::AssJac(), TotalForce::AssJac(), ViscoElasticHingeJoint::AssJac(), LoadIncForce::AssJac(), FollowerInternalForce::AssJac(), PlanePinJoint::AssJac(), FollowerInternalCouple::AssJac(), Rod::AssMats(), ViscousBody::AssMats(), DynamicMass::AssMats(), DeformableDispJoint::AssMats(), DynamicVariableBody::AssMats(), DeformableJoint::AssMats(), ElasticAxialJoint::AssMats(), ElasticDispJoint::AssMats(), StaticMass::AssMats(), ElasticHingeJoint::AssMats(), StaticVariableBody::AssMats(), ElasticJoint::AssMats(), ElasticDispJointInv::AssMats(), ViscousAxialJoint::AssMats(), ElasticJointInv::AssMats(), Beam::AssMats(), DynamicBody::AssMats(), ViscousHingeJoint::AssMats(), ViscoElasticAxialJoint::AssMats(), StaticBody::AssMats(), ViscoElasticHingeJoint::AssMats(), AbsoluteDispForce::AssRes(), ModalForce::AssRes(), InlineFriction::AssRes(), InLineJoint::AssRes(), LinearVelocityJoint::AssRes(), DistanceJoint::AssRes(), HydrodynamicPlainBearing::AssRes(), UniversalHingeJoint::AssRes(), PrismaticJoint::AssRes(), SphericalHingeJoint::AssRes(), InPlaneJoint::AssRes(), Actuator::AssRes(), asynchronous_machine::AssRes(), Wheel2::AssRes(), ModalMappingExt::AssRes(), RodBezier::AssRes(), GimbalRotationJoint::AssRes(), Motor::AssRes(), Rod::AssRes(), StructExtForce::AssRes(), PointSurfaceContact::AssRes(), StructMappingExtForce::AssRes(), GenericAerodynamicForce::AssRes(), AbsoluteInternalDispForce::AssRes(), Brake::AssRes(), DriveDisplacementJoint::AssRes(), DriveHingeJoint::AssRes(), ViscousBody::AssRes(), ContactJoint::AssRes(), PlaneHingeJoint::AssRes(), BeamSliderJoint::AssRes(), AerodynamicModal::AssRes(), AngularVelocityJoint::AssRes(), InLineWithOffsetJoint::AssRes(), ModuleNonsmoothNode::AssRes(), ModalExt::AssRes(), TotalJoint::AssRes(), DistanceJointWithOffset::AssRes(), DeformableJoint::AssRes(), UniversalRotationJoint::AssRes(), PinJoint::AssRes(), InPlaneWithOffsetJoint::AssRes(), ElasticAxialJoint::AssRes(), ElasticDispJoint::AssRes(), StaticMass::AssRes(), ViscoElasticRod::AssRes(), HBeam::AssRes(), ElasticHingeJoint::AssRes(), AbsoluteForce::AssRes(), Beam2::AssRes(), StaticVariableBody::AssRes(), Membrane4EAS::AssRes(), DriveDisplacementPinJoint::AssRes(), UniversalPinJoint::AssRes(), PlaneRotationJoint::AssRes(), AerodynamicBody::AssRes(), RodWithOffset::AssRes(), FollowerForce::AssRes(), ClampJoint::AssRes(), Wheel4::AssRes(), ElasticDispJointInv::AssRes(), Beam::AssRes(), ViscousAxialJoint::AssRes(), Shell4EAS::AssRes(), TotalReaction::AssRes(), AbsoluteCouple::AssRes(), Shell4EASANS::AssRes(), ModuleIMUConstraint::AssRes(), TotalPinJoint::AssRes(), AerodynamicBeam::AssRes(), FollowerCouple::AssRes(), ViscousHingeJoint::AssRes(), ViscousDispJoint::AssRes(), ViscoElasticAxialJoint::AssRes(), AxialRotationJoint::AssRes(), StaticBody::AssRes(), AerodynamicBeam2::AssRes(), AbsoluteInternalForce::AssRes(), TotalForce::AssRes(), ViscoElasticDispJoint::AssRes(), LoadIncForce::AssRes(), PlanePinJoint::AssRes(), ViscoElasticHingeJoint::AssRes(), FollowerInternalForce::AssRes(), AbsoluteInternalCouple::AssRes(), FollowerInternalCouple::AssRes(), DataManager::DofOwnerInit(), ModalNode::iGetFirstRowIndex(), PointSurfaceContact::InitialAssJac(), PointSurfaceContact::InitialAssRes(), DynamicMass::SetValue(), DynamicVariableBody::SetValue(), and DynamicBody::SetValue().
|
inlinevirtual |
Reimplemented in DummyStructNode.
Definition at line 452 of file strnode.h.
References DofOwnerOwner::iGetFirstIndex().
Referenced by HydrodynamicPlainBearing::AssJac(), Accelerometer::AssJac(), InLineJoint::AssJac(), InlineFriction::AssJac(), LinearVelocityJoint::AssJac(), DistanceJoint::AssJac(), UniversalHingeJoint::AssJac(), SphericalHingeJoint::AssJac(), PrismaticJoint::AssJac(), InPlaneJoint::AssJac(), ContactJoint::AssJac(), Actuator::AssJac(), asynchronous_machine::AssJac(), GimbalRotationJoint::AssJac(), RodBezier::AssJac(), PiezoActuatorBeam2::AssJac(), Rod::AssJac(), PiezoActuatorBeam::AssJac(), Motor::AssJac(), PointSurfaceContact::AssJac(), DriveDisplacementJoint::AssJac(), ViscousBody::AssJac(), Brake::AssJac(), DriveHingeJoint::AssJac(), AutomaticStructDispElem::AssJac(), DynamicMass::AssJac(), DeformableDispJoint::AssJac(), PlaneHingeJoint::AssJac(), DynamicVariableBody::AssJac(), BeamSliderJoint::AssJac(), InLineWithOffsetJoint::AssJac(), ModuleNonsmoothNode::AssJac(), AngularVelocityJoint::AssJac(), TotalEquation::AssJac(), DeformableJoint::AssJac(), TotalJoint::AssJac(), DistanceJointWithOffset::AssJac(), UniversalRotationJoint::AssJac(), PinJoint::AssJac(), InPlaneWithOffsetJoint::AssJac(), ElasticAxialJoint::AssJac(), PiezoActuatorVEBeam2::AssJac(), StaticMass::AssJac(), ViscoElasticRod::AssJac(), ElasticHingeJoint::AssJac(), PiezoActuatorVEBeam::AssJac(), HBeam::AssJac(), AbsoluteForce::AssJac(), StaticVariableBody::AssJac(), Beam2::AssJac(), AutomaticStructElem::AssJac(), DriveDisplacementPinJoint::AssJac(), Membrane4EAS::AssJac(), UniversalPinJoint::AssJac(), PlaneRotationJoint::AssJac(), AerodynamicBody::AssJac(), ClampJoint::AssJac(), RodWithOffset::AssJac(), FollowerForce::AssJac(), ViscousAxialJoint::AssJac(), Wheel4::AssJac(), Beam::AssJac(), TotalReaction::AssJac(), Shell4EAS::AssJac(), DynamicBody::AssJac(), ModuleIMUConstraint::AssJac(), TotalPinJoint::AssJac(), AerodynamicBeam::AssJac(), Shell4EASANS::AssJac(), ViscousHingeJoint::AssJac(), FollowerCouple::AssJac(), ViscoElasticAxialJoint::AssJac(), AxialRotationJoint::AssJac(), StaticBody::AssJac(), AerodynamicBeam2::AssJac(), AbsoluteInternalForce::AssJac(), TotalForce::AssJac(), ViscoElasticHingeJoint::AssJac(), LoadIncForce::AssJac(), FollowerInternalForce::AssJac(), PlanePinJoint::AssJac(), FollowerInternalCouple::AssJac(), Rod::AssMats(), ViscousBody::AssMats(), AutomaticStructDispElem::AssMats(), DynamicMass::AssMats(), DeformableDispJoint::AssMats(), DynamicVariableBody::AssMats(), DeformableJoint::AssMats(), ElasticAxialJoint::AssMats(), ElasticDispJoint::AssMats(), StaticMass::AssMats(), ElasticHingeJoint::AssMats(), StaticVariableBody::AssMats(), ElasticJoint::AssMats(), AutomaticStructElem::AssMats(), ElasticDispJointInv::AssMats(), ViscousAxialJoint::AssMats(), ElasticJointInv::AssMats(), Beam::AssMats(), DynamicBody::AssMats(), ViscousHingeJoint::AssMats(), ViscoElasticAxialJoint::AssMats(), StaticBody::AssMats(), ViscoElasticHingeJoint::AssMats(), AutomaticStructDispElem::AssRes(), ViscousBody::AssRes(), DynamicMass::AssRes(), DynamicVariableBody::AssRes(), DeformableJoint::AssRes(), ElasticAxialJoint::AssRes(), ElasticDispJoint::AssRes(), StaticMass::AssRes(), AbsoluteForce::AssRes(), ElasticHingeJoint::AssRes(), StaticVariableBody::AssRes(), AutomaticStructElem::AssRes(), FollowerForce::AssRes(), Beam::AssRes(), ElasticDispJointInv::AssRes(), ViscousAxialJoint::AssRes(), AbsoluteCouple::AssRes(), DynamicBody::AssRes(), FollowerCouple::AssRes(), ViscousHingeJoint::AssRes(), ViscousDispJoint::AssRes(), ViscoElasticAxialJoint::AssRes(), ModalBody::AssRes(), StaticBody::AssRes(), AbsoluteInternalForce::AssRes(), ViscoElasticDispJoint::AssRes(), TotalForce::AssRes(), FollowerInternalForce::AssRes(), ViscoElasticHingeJoint::AssRes(), AbsoluteInternalCouple::AssRes(), FollowerInternalCouple::AssRes(), DataManager::DofOwnerInit(), DistanceJoint::InitialAssJac(), LinearVelocityJoint::InitialAssJac(), InLineJoint::InitialAssJac(), UniversalHingeJoint::InitialAssJac(), InPlaneJoint::InitialAssJac(), PrismaticJoint::InitialAssJac(), SphericalHingeJoint::InitialAssJac(), RodBezier::InitialAssJac(), GimbalRotationJoint::InitialAssJac(), PointSurfaceContact::InitialAssJac(), Rod::InitialAssJac(), DriveDisplacementJoint::InitialAssJac(), DriveHingeJoint::InitialAssJac(), PlaneHingeJoint::InitialAssJac(), DynamicVariableBody::InitialAssJac(), ViscousBody::InitialAssJac(), AngularVelocityJoint::InitialAssJac(), InLineWithOffsetJoint::InitialAssJac(), DistanceJointWithOffset::InitialAssJac(), UniversalRotationJoint::InitialAssJac(), PinJoint::InitialAssJac(), TotalEquation::InitialAssJac(), InPlaneWithOffsetJoint::InitialAssJac(), TotalJoint::InitialAssJac(), ViscoElasticRod::InitialAssJac(), ElasticAxialJoint::InitialAssJac(), ElasticDispJoint::InitialAssJac(), AbsoluteForce::InitialAssJac(), ElasticHingeJoint::InitialAssJac(), ElasticJoint::InitialAssJac(), HBeam::InitialAssJac(), DriveDisplacementPinJoint::InitialAssJac(), UniversalPinJoint::InitialAssJac(), PlaneRotationJoint::InitialAssJac(), RodWithOffset::InitialAssJac(), Beam2::InitialAssJac(), FollowerForce::InitialAssJac(), ClampJoint::InitialAssJac(), ElasticDispJointInv::InitialAssJac(), ViscousAxialJoint::InitialAssJac(), ElasticJointInv::InitialAssJac(), TotalReaction::InitialAssJac(), DynamicBody::InitialAssJac(), Beam::InitialAssJac(), FollowerCouple::InitialAssJac(), TotalPinJoint::InitialAssJac(), ViscousHingeJoint::InitialAssJac(), ViscousJoint::InitialAssJac(), ViscousDispJoint::InitialAssJac(), ViscoElasticAxialJoint::InitialAssJac(), AxialRotationJoint::InitialAssJac(), ViscoElasticJoint::InitialAssJac(), AbsoluteInternalForce::InitialAssJac(), TotalForce::InitialAssJac(), ViscoElasticDispJoint::InitialAssJac(), PlanePinJoint::InitialAssJac(), FollowerInternalForce::InitialAssJac(), ViscoElasticHingeJoint::InitialAssJac(), FollowerInternalCouple::InitialAssJac(), AbsoluteDispForce::InitialAssRes(), DistanceJoint::InitialAssRes(), LinearVelocityJoint::InitialAssRes(), InLineJoint::InitialAssRes(), UniversalHingeJoint::InitialAssRes(), InPlaneJoint::InitialAssRes(), PrismaticJoint::InitialAssRes(), SphericalHingeJoint::InitialAssRes(), GimbalRotationJoint::InitialAssRes(), RodBezier::InitialAssRes(), Rod::InitialAssRes(), AbsoluteInternalDispForce::InitialAssRes(), ViscousBody::InitialAssRes(), DriveDisplacementJoint::InitialAssRes(), DriveHingeJoint::InitialAssRes(), PlaneHingeJoint::InitialAssRes(), DynamicVariableBody::InitialAssRes(), AngularVelocityJoint::InitialAssRes(), InLineWithOffsetJoint::InitialAssRes(), DeformableJoint::InitialAssRes(), DistanceJointWithOffset::InitialAssRes(), UniversalRotationJoint::InitialAssRes(), PinJoint::InitialAssRes(), TotalEquation::InitialAssRes(), InPlaneWithOffsetJoint::InitialAssRes(), TotalJoint::InitialAssRes(), ViscoElasticRod::InitialAssRes(), ElasticAxialJoint::InitialAssRes(), ElasticDispJoint::InitialAssRes(), AbsoluteForce::InitialAssRes(), ElasticHingeJoint::InitialAssRes(), HBeam::InitialAssRes(), DriveDisplacementPinJoint::InitialAssRes(), AerodynamicBody::InitialAssRes(), UniversalPinJoint::InitialAssRes(), PlaneRotationJoint::InitialAssRes(), RodWithOffset::InitialAssRes(), Beam2::InitialAssRes(), FollowerForce::InitialAssRes(), ClampJoint::InitialAssRes(), ElasticDispJointInv::InitialAssRes(), ViscousAxialJoint::InitialAssRes(), AbsoluteCouple::InitialAssRes(), TotalReaction::InitialAssRes(), DynamicBody::InitialAssRes(), AerodynamicBeam::InitialAssRes(), Beam::InitialAssRes(), TotalPinJoint::InitialAssRes(), FollowerCouple::InitialAssRes(), ViscousHingeJoint::InitialAssRes(), ViscousDispJoint::InitialAssRes(), ViscoElasticAxialJoint::InitialAssRes(), AxialRotationJoint::InitialAssRes(), AerodynamicBeam2::InitialAssRes(), AbsoluteInternalForce::InitialAssRes(), TotalForce::InitialAssRes(), ViscoElasticDispJoint::InitialAssRes(), PlanePinJoint::InitialAssRes(), FollowerInternalForce::InitialAssRes(), ViscoElasticHingeJoint::InitialAssRes(), AbsoluteInternalCouple::InitialAssRes(), FollowerInternalCouple::InitialAssRes(), and DataManager::InitialJointAssembly().

|
inlinevirtual |
Reimplemented in DummyStructNode, and StructNode.
Definition at line 298 of file strnode.h.
Referenced by DataManager::InitialJointAssembly().
|
virtual |
Reimplemented from Node.
Reimplemented in StructNode.
Definition at line 804 of file strnode.cc.
References bComputeAccelerations().

|
virtual |
Reimplemented from Node.
Reimplemented in StructNode.
Definition at line 836 of file strnode.cc.
References ComputeAccelerations(), WithLabel::GetLabel(), and MBDYN_EXCEPT_ARGS.

|
virtual |
Reimplemented in DummyStructNode, and StructNode.
Definition at line 594 of file strnode.cc.
References DofOwnerOwner::iGetFirstIndex(), VCurr, and XCurr.

|
virtual |
Reimplemented from ToBeOutput.
Reimplemented in StructNode.
Definition at line 504 of file strnode.cc.
References bOutputAccels, ToBeOutput::bToBeOutput(), EULER_123, EULER_313, EULER_321, Eye3, OutputHandler::GetCurrentStep(), WithLabel::GetLabel(), od, ORIENTATION_MATRIX, ORIENTATION_VECTOR, Mat3x3::pGetMat(), Vec3::pGetVec(), OutputHandler::STRNODES, OutputHandler::StrNodes(), OutputHandler::UseNetCDF(), OutputHandler::UseText(), VCurr, XCurr, XPPCurr, and Zero3.
|
inlinevirtual |
|
virtual |
Reimplemented from ToBeOutput.
Reimplemented in StructNode.
Definition at line 445 of file strnode.cc.
References ASSERT, bOutputAccels, ToBeOutput::bToBeOutput(), DYNAMIC, WithLabel::GetLabel(), GetStructDispNodeType(), OutputHandler::IsOpen(), OutputHandler::NETCDF, od, STATIC, OutputHandler::STRNODES, and OutputHandler::UseNetCDF().
| const RigidBodyKinematics * StructDispNode::pGetRBK | ( | void | ) | const |
Definition at line 152 of file strnode.cc.
References pRefRBK.
Referenced by AutomaticStructDispElem::AssJac(), DynamicMass::AssJac(), DynamicVariableBody::AssJac(), AutomaticStructElem::AssJac(), DynamicBody::AssJac(), DynamicMass::AssMats(), DynamicVariableBody::AssMats(), StaticMass::AssMats(), StaticVariableBody::AssMats(), DynamicBody::AssMats(), ModalBody::AssMats(), StaticBody::AssMats(), Mass::AssMatsRBK_int(), VariableBody::AssMatsRBK_int(), Body::AssMatsRBK_int(), AutomaticStructDispElem::AssRes(), DynamicMass::AssRes(), DynamicVariableBody::AssRes(), StaticMass::AssRes(), StaticVariableBody::AssRes(), AutomaticStructElem::AssRes(), DynamicBody::AssRes(), ModalBody::AssRes(), StaticBody::AssRes(), Mass::AssVecRBK_int(), VariableBody::AssVecRBK_int(), Body::AssVecRBK_int(), ReadBody(), and ReadModal().
|
virtual |
Implements Node.
Reimplemented in StructNode.
Definition at line 341 of file strnode.cc.
References DofOwner::dGetScale(), dPositionStiffness, dVelocityStiffness, DYNAMIC, WithLabel::GetLabel(), GetStructDispNodeType(), DofOwnerOwner::pGetDofOwner(), STATIC, VCurr, Vec3::Write(), and XCurr.
|
virtual |
Implements Node.
Reimplemented in DummyStructNode, DynamicStructNode, StructNode, and DynamicStructDispNode.
Definition at line 422 of file strnode.cc.
References ASSERT, WithLabel::GetLabel(), MBDYN_EXCEPT_ARGS, VCurr, and XCurr.
Referenced by DynamicStructDispNode::SetDofValue().

|
virtual |
Initialize state vector used in initial assembly. May set internal states of the element. Do not rely on being always called, because initial assembly could be implicitly or explicitly skipped
Reimplemented from DofOwnerOwner.
Reimplemented in DummyStructNode, and StructNode.
Definition at line 628 of file strnode.cc.
References DofOwnerOwner::iGetFirstIndex(), VectorHandler::Put(), VCurr, and XCurr.
|
virtual |
Reimplemented from SimulationEntity.
Reimplemented in DummyStructNode, and StructNode.
Definition at line 639 of file strnode.cc.
References Vec3::Cross(), WithLabel::GetLabel(), StructNode::GetRCurr(), GetVCurr(), StructNode::GetWCurr(), GetXCurr(), DofOwnerOwner::iGetFirstIndex(), Mat3x3::MulTM(), Mat3x3::MulTV(), pRefNode, VectorHandler::Put(), VCurr, VPrev, XCurr, and XPrev.
|
virtual |
Reimplemented from SimulationEntity.
Reimplemented in PivotRelFrameDummyStructNode, RelFrameDummyStructNode, OffsetDummyStructNode, ModalNode, DynamicStructNode, StructNode, and DynamicStructDispNode.
Definition at line 571 of file strnode.cc.
References DofOwnerOwner::iGetFirstIndex(), VCurr, and XCurr.

|
virtual |
Reimplemented from SimulationEntity.
Reimplemented in StructNode.
Definition at line 604 of file strnode.cc.
References InverseDynamics::ACCELERATION, ASSERT, DofOwnerOwner::iGetFirstIndex(), MBDYN_EXCEPT_ARGS, InverseDynamics::POSITION, VCurr, InverseDynamics::VELOCITY, XCurr, and XPPCurr.

|
protected |
Definition at line 122 of file strnode.h.
Referenced by bOutputAccelerations(), DynamicStructDispNode::DynamicStructDispNode(), OffsetDummyStructNode::OffsetDummyStructNode(), Output(), StructNode::Output(), OutputAccelerations(), OutputPrepare(), StructNode::OutputPrepare(), PivotRelFrameDummyStructNode::PivotRelFrameDummyStructNode(), and RelFrameDummyStructNode::RelFrameDummyStructNode().
|
protected |
Definition at line 114 of file strnode.h.
Referenced by dGetPositionStiffness(), Restart(), and StructNode::Restart().
|
protected |
Definition at line 115 of file strnode.h.
Referenced by dGetVelocityStiffness(), Restart(), and StructNode::Restart().
|
protected |
Definition at line 111 of file strnode.h.
Referenced by Output(), StructNode::Output(), OutputPrepare(), StructNode::OutputPrepare(), and ReadBeam().
|
protected |
Definition at line 98 of file strnode.h.
Referenced by AfterPredict(), StructNode::AfterPredict(), BeforePredict(), StructNode::BeforePredict(), SetValue(), and StructNode::SetValue().
|
protected |
|
mutableprotected |
Definition at line 93 of file strnode.h.
Referenced by AfterConvergence(), StructNode::AfterConvergence(), AfterPredict(), StructNode::AfterPredict(), BeforePredict(), StructNode::BeforePredict(), DerivativesUpdate(), StructNode::DerivativesUpdate(), dGetDofValue(), StructNode::dGetDofValue(), dGetPrivData(), StructNode::dGetPrivData(), GetVCurr(), InitialUpdate(), StructNode::InitialUpdate(), Output(), StructNode::Output(), Restart(), StructNode::Restart(), SetDofValue(), StructNode::SetDofValue(), SetInitialValue(), StructNode::SetInitialValue(), SetValue(), StructNode::SetValue(), Update(), StructNode::Update(), OffsetDummyStructNode::Update_int(), RelFrameDummyStructNode::Update_int(), and PivotRelFrameDummyStructNode::Update_int().
|
mutableprotected |
Definition at line 92 of file strnode.h.
Referenced by AfterConvergence(), StructNode::AfterConvergence(), BeforePredict(), StructNode::BeforePredict(), dGetDofValuePrev(), StructNode::dGetDofValuePrev(), GetVPrev(), SetValue(), and StructNode::SetValue().
|
mutableprotected |
Definition at line 90 of file strnode.h.
Referenced by AfterConvergence(), StructNode::AfterConvergence(), AfterPredict(), StructNode::AfterPredict(), BeforePredict(), StructNode::BeforePredict(), DerivativesUpdate(), StructNode::DerivativesUpdate(), dGetDofValue(), StructNode::dGetDofValue(), dGetPrivData(), StructNode::dGetPrivData(), GetXCurr(), InitialUpdate(), StructNode::InitialUpdate(), Output(), StructNode::Output(), Restart(), StructNode::Restart(), SetDofValue(), StructNode::SetDofValue(), SetInitialValue(), StructNode::SetInitialValue(), SetValue(), StructNode::SetValue(), Update(), StructNode::Update(), OffsetDummyStructNode::Update_int(), RelFrameDummyStructNode::Update_int(), and PivotRelFrameDummyStructNode::Update_int().
|
mutableprotected |
Definition at line 95 of file strnode.h.
Referenced by AfterConvergence(), DynamicStructDispNode::AfterConvergence(), StructNode::AfterConvergence(), DynamicStructNode::AfterConvergence(), DynamicStructDispNode::BeforePredict(), DynamicStructNode::BeforePredict(), DynamicStructDispNode::dGetDofValue(), DynamicStructNode::dGetDofValue(), dGetPrivData(), StructNode::dGetPrivData(), GetXPPCurr(), Output(), StructNode::Output(), DynamicStructDispNode::SetDofValue(), DynamicStructNode::SetDofValue(), Update(), DynamicStructDispNode::Update(), StructNode::Update(), DynamicStructNode::Update(), ModalNode::Update(), OffsetDummyStructNode::Update_int(), RelFrameDummyStructNode::Update_int(), and PivotRelFrameDummyStructNode::Update_int().
|
mutableprotected |
Definition at line 96 of file strnode.h.
Referenced by AfterConvergence(), StructNode::AfterConvergence(), DynamicStructDispNode::BeforePredict(), DynamicStructNode::BeforePredict(), DynamicStructDispNode::dGetDofValuePrev(), DynamicStructNode::dGetDofValuePrev(), and GetXPPPrev().
|
mutableprotected |
Definition at line 89 of file strnode.h.
Referenced by AfterConvergence(), StructNode::AfterConvergence(), BeforePredict(), StructNode::BeforePredict(), dGetDofValuePrev(), StructNode::dGetDofValuePrev(), GetXPrev(), SetValue(), and StructNode::SetValue().
 1.8.7
1.8.7 
