|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
#include <vh.h>
Public Member Functions | |
| virtual | ~VectorHandler (void) |
| virtual doublereal * | pdGetVec (void) const =0 |
| virtual integer | iGetSize (void) const =0 |
| virtual void | Reset (void)=0 |
| virtual void | Resize (integer iNewSize)=0 |
| virtual void | ResizeReset (integer) |
| virtual void | PutCoef (integer iRow, const doublereal &dCoef)=0 |
| virtual void | IncCoef (integer iRow, const doublereal &dCoef)=0 |
| virtual void | DecCoef (integer iRow, const doublereal &dCoef)=0 |
| virtual const doublereal & | dGetCoef (integer iRow) const =0 |
| virtual const doublereal & | operator() (integer iRow) const =0 |
| virtual doublereal & | operator() (integer iRow)=0 |
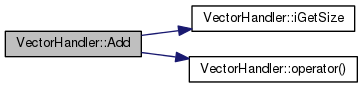
| virtual void | Add (integer iRow, const Vec3 &v) |
| virtual void | Sub (integer iRow, const Vec3 &v) |
| virtual void | Put (integer iRow, const Vec3 &v) |
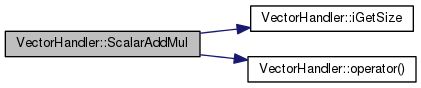
| virtual VectorHandler & | ScalarAddMul (const VectorHandler &VH, const doublereal &d) |
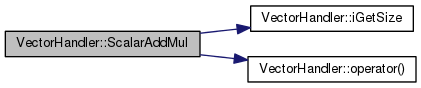
| virtual VectorHandler & | ScalarAddMul (const VectorHandler &VH, const VectorHandler &VH1, const doublereal &d) |
| virtual VectorHandler & | ScalarMul (const VectorHandler &VH, const doublereal &d) |
| virtual VectorHandler & | operator+= (const VectorHandler &VH) |
| virtual VectorHandler & | operator+= (const SubVectorHandler &SubVH) |
| virtual VectorHandler & | operator-= (const VectorHandler &VH) |
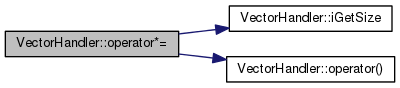
| virtual VectorHandler & | operator*= (const doublereal &d) |
| virtual VectorHandler & | operator= (const VectorHandler &VH) |
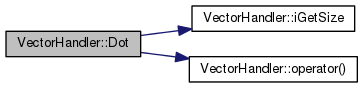
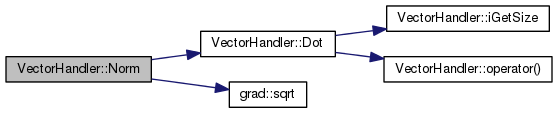
| virtual doublereal | Dot (void) const |
| virtual doublereal | Norm (void) const |
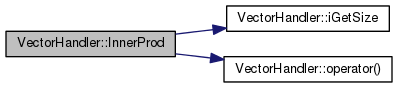
| virtual doublereal | InnerProd (const VectorHandler &VH) const |
|
virtual |
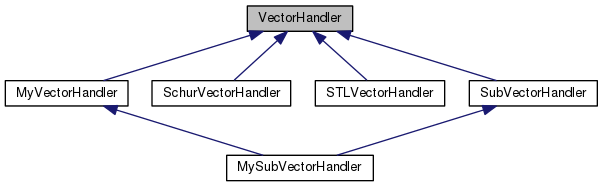
Reimplemented in MyVectorHandler, and STLVectorHandler.
Definition at line 63 of file vh.cc.
References ASSERT, iGetSize(), and operator()().
Referenced by AbsoluteDispForce::AssRes(), InLineJoint::AssRes(), LinearVelocityJoint::AssRes(), DistanceJoint::AssRes(), HydrodynamicPlainBearing::AssRes(), UniversalHingeJoint::AssRes(), PrismaticJoint::AssRes(), SphericalHingeJoint::AssRes(), InPlaneJoint::AssRes(), Actuator::AssRes(), Wheel2::AssRes(), StructExtForce::AssRes(), StructMappingExtForce::AssRes(), AbsoluteInternalDispForce::AssRes(), Brake::AssRes(), AutomaticStructDispElem::AssRes(), PlaneHingeJoint::AssRes(), DynamicMass::AssRes(), DynamicVariableBody::AssRes(), BeamSliderJoint::AssRes(), AngularVelocityJoint::AssRes(), InLineWithOffsetJoint::AssRes(), TotalJoint::AssRes(), DistanceJointWithOffset::AssRes(), UniversalRotationJoint::AssRes(), PinJoint::AssRes(), AeroDynModule::AssRes(), InPlaneWithOffsetJoint::AssRes(), StaticMass::AssRes(), ViscoElasticRod::AssRes(), AbsoluteForce::AssRes(), StaticVariableBody::AssRes(), AutomaticStructElem::AssRes(), UniversalPinJoint::AssRes(), PlaneRotationJoint::AssRes(), Modal::AssRes(), FollowerForce::AssRes(), Wheel4::AssRes(), TotalReaction::AssRes(), AbsoluteCouple::AssRes(), DynamicBody::AssRes(), ModuleIMUConstraint::AssRes(), FollowerCouple::AssRes(), ModalBody::AssRes(), AxialRotationJoint::AssRes(), StaticBody::AssRes(), AbsoluteInternalForce::AssRes(), TotalForce::AssRes(), LoadIncForce::AssRes(), PlanePinJoint::AssRes(), FollowerInternalForce::AssRes(), AbsoluteInternalCouple::AssRes(), FollowerInternalCouple::AssRes(), Beam2::AssStiffnessVec(), HBeam::AssStiffnessVec(), Beam::AssStiffnessVec(), ViscoElasticBeam2::AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), GimbalRotationJoint::AssVec(), DriveDisplacementJoint::AssVec(), DriveHingeJoint::AssVec(), PointSurfaceContact::AssVec(), Rod::AssVec(), GenericAerodynamicForce::AssVec(), RodBezier::AssVec(), AerodynamicModal::AssVec(), ElasticAxialJoint::AssVec(), ElasticDispJoint::AssVec(), ElasticHingeJoint::AssVec(), ElasticJoint::AssVec(), AerodynamicBody::AssVec(), ViscousAxialJoint::AssVec(), ElasticDispJointInv::AssVec(), RodWithOffset::AssVec(), ElasticHingeJointInv::AssVec(), ElasticJointInv::AssVec(), AerodynamicBeam::AssVec(), ViscousHingeJoint::AssVec(), ViscousDispJoint::AssVec(), ViscoElasticAxialJoint::AssVec(), ViscousJoint::AssVec(), AerodynamicBeam2::AssVec(), ViscousHingeJointInv::AssVec(), ViscoElasticJoint::AssVec(), ViscoElasticDispJoint::AssVec(), ViscoElasticHingeJoint::AssVec(), ViscoElasticHingeJointInv::AssVec(), AbsoluteDispForce::InitialAssRes(), DistanceJoint::InitialAssRes(), LinearVelocityJoint::InitialAssRes(), InLineJoint::InitialAssRes(), UniversalHingeJoint::InitialAssRes(), InPlaneJoint::InitialAssRes(), PrismaticJoint::InitialAssRes(), SphericalHingeJoint::InitialAssRes(), AbsoluteInternalDispForce::InitialAssRes(), DriveDisplacementJoint::InitialAssRes(), DriveHingeJoint::InitialAssRes(), PlaneHingeJoint::InitialAssRes(), DynamicVariableBody::InitialAssRes(), AngularVelocityJoint::InitialAssRes(), InLineWithOffsetJoint::InitialAssRes(), UniversalRotationJoint::InitialAssRes(), PinJoint::InitialAssRes(), InPlaneWithOffsetJoint::InitialAssRes(), TotalJoint::InitialAssRes(), ViscoElasticRod::InitialAssRes(), AbsoluteForce::InitialAssRes(), DriveDisplacementPinJoint::InitialAssRes(), UniversalPinJoint::InitialAssRes(), PlaneRotationJoint::InitialAssRes(), Modal::InitialAssRes(), FollowerForce::InitialAssRes(), ViscousAxialJoint::InitialAssRes(), AbsoluteCouple::InitialAssRes(), TotalReaction::InitialAssRes(), DynamicBody::InitialAssRes(), FollowerCouple::InitialAssRes(), ViscousHingeJoint::InitialAssRes(), ViscousDispJoint::InitialAssRes(), ViscoElasticAxialJoint::InitialAssRes(), AxialRotationJoint::InitialAssRes(), AbsoluteInternalForce::InitialAssRes(), TotalForce::InitialAssRes(), ViscoElasticDispJoint::InitialAssRes(), PlanePinJoint::InitialAssRes(), ViscoElasticHingeJoint::InitialAssRes(), FollowerInternalForce::InitialAssRes(), AbsoluteInternalCouple::InitialAssRes(), FollowerInternalCouple::InitialAssRes(), DataManager::InitialJointAssembly(), DynamicMass::SetValue(), DynamicVariableBody::SetValue(), and DynamicBody::SetValue().
|
pure virtual |
Implemented in MySubVectorHandler, SchurVectorHandler, MyVectorHandler, and STLVectorHandler.
Referenced by ThermalResistance::AssRes(), TotalJoint::AssRes(), Modal::AssRes(), GimbalRotationJoint::AssVec(), Gmres::Backsolve(), SchurMatrixHandler::CompNewf(), SchurMatrixHandlerUm::CompNewf(), SchurVectorHandler::DecCoef(), Modal::InitialAssRes(), MatrixHandler::MatTVecDecMul(), FullMatrixHandler::MatTVecMul_base(), MatrixHandler::MatVecDecMul(), FullMatrixHandler::MatVecMul_base(), and ExpandableRowVector::Sub().
|
pure virtual |
Implemented in MySubVectorHandler, SchurVectorHandler, MyVectorHandler, and STLVectorHandler.
Referenced by Modal::AssRes(), ModalBody::AssRes(), InlineFriction::InitialAssJac(), and InlineFriction::InitialAssRes().
|
virtual |
Reimplemented in MyVectorHandler, and STLVectorHandler.
Definition at line 244 of file vh.cc.
References iGetSize(), and operator()().
Referenced by DataManager::InitialJointAssembly(), Norm(), LineSearchSolver::Residual(), and LineSearchSolver::Solve().
|
pure virtual |
Implemented in MySubVectorHandler, SchurVectorHandler, MyVectorHandler, and STLVectorHandler.
Referenced by Add(), Modal::AssRes(), AerodynamicBody::AssVec(), AerodynamicBeam::AssVec(), AerodynamicBeam2::AssVec(), SchurMatrixHandler::CompNewf(), SchurMatrixHandlerUm::CompNewf(), SchurMatrixHandler::CompNewg(), VecN::Copy(), Dot(), ImplicitStepIntegrator::EvalProd(), InverseDynamicsStepSolver::EvalProd(), STLVectorHandler::InnerProd(), InnerProd(), DataManager::MakeRestart(), NonlinearSolverTest::MakeTest(), NaiveMatrixHandler::MatTVecMul_base(), MatrixHandler::MatTVecMul_base(), CompactSparseMatrixHandler_tpl< off >::MatTVecMul_base(), FullMatrixHandler::MatTVecMul_base(), SpMapMatrixHandler::MatTVecMul_base(), NaivePermMatrixHandler::MatTVecMul_base(), NaiveMatrixHandler::MatVecMul_base(), MatrixHandler::MatVecMul_base(), CompactSparseMatrixHandler_tpl< off >::MatVecMul_base(), FullMatrixHandler::MatVecMul_base(), SpMapMatrixHandler::MatVecMul_base(), NaivePermMatrixHandler::MatVecMul_base(), operator*=(), STLVectorHandler::operator+=(), operator+=(), MyVectorHandler::operator+=(), STLVectorHandler::operator-=(), operator-=(), MyVectorHandler::operator-=(), operator<<(), STLVectorHandler::operator=(), operator=(), MyVectorHandler::operator=(), output_eigenvalues(), DataManager::PrintResidual(), DataManager::PrintSolution(), Put(), STLVectorHandler::ScalarAddMul(), ScalarAddMul(), MyVectorHandler::ScalarAddMul(), STLVectorHandler::ScalarMul(), ScalarMul(), MyVectorHandler::ScalarMul(), MatrixScaleBase::ScaleVector(), DataManager::SetValue(), BiCGStab::Solve(), NewtonRaphsonSolver::Solve(), Gmres::Solve(), LineSearchSolver::Solve(), Sub(), ImplicitStepIntegrator::TestScale(), InverseDynamicsStepSolver::TestScale(), Vec3::Vec3(), and VecN::VecN().
|
pure virtual |
Implemented in MySubVectorHandler, SchurVectorHandler, MyVectorHandler, and STLVectorHandler.
Referenced by ExpandableRowVector::Add(), MySubVectorHandler::AddTo(), ThermalSource::AssRes(), ThermalCapacitance::AssRes(), ThermalResistance::AssRes(), Modal::AssRes(), AerodynamicModal::AssVec(), SchurVectorHandler::IncCoef(), Modal::InitialAssRes(), MatrixHandler::MatTVecIncMul(), MatrixHandler::MatTVecMul(), FullMatrixHandler::MatTVecMul_base(), MatrixHandler::MatVecIncMul(), MatrixHandler::MatVecMul(), FullMatrixHandler::MatVecMul_base(), ThirdOrderIntegrator::RealPredictDof(), ThirdOrderIntegrator::UpdateDof(), DerivativeSolver::UpdateDof(), and StepNIntegrator::UpdateDof().
|
virtual |
Reimplemented in STLVectorHandler.
Definition at line 269 of file vh.cc.
References ASSERT, iGetSize(), and operator()().
Referenced by ImplicitStepIntegrator::EvalProd(), InverseDynamicsStepSolver::EvalProd(), LineSearchSolver::LineSearch(), BiCGStab::Solve(), and Gmres::Solve().
|
virtual |
Definition at line 262 of file vh.cc.
References Dot(), and grad::sqrt().
Referenced by ImplicitStepIntegrator::EvalProd(), InverseDynamicsStepSolver::EvalProd(), LineSearchSolver::LineSearch(), BiCGStab::Solve(), and Gmres::Solve().
|
pure virtual |
Implemented in MySubVectorHandler, SchurVectorHandler, MyVectorHandler, and STLVectorHandler.
Referenced by Add(), Dot(), InnerProd(), operator*=(), operator+=(), operator-=(), operator=(), Put(), ScalarAddMul(), ScalarMul(), and Sub().
|
pure virtual |
Implemented in MySubVectorHandler, SchurVectorHandler, MyVectorHandler, and STLVectorHandler.
|
virtual |
Reimplemented in MyVectorHandler, and STLVectorHandler.
Definition at line 212 of file vh.cc.
References iGetSize(), and operator()().
|
virtual |
Reimplemented in MyVectorHandler, and STLVectorHandler.
Definition at line 163 of file vh.cc.
References ASSERT, iGetSize(), and operator()().

|
virtual |
Definition at line 180 of file vh.cc.
References SubVectorHandler::AddTo(), and iGetSize().

|
virtual |
Reimplemented in MyVectorHandler, and STLVectorHandler.
Definition at line 195 of file vh.cc.
References ASSERT, iGetSize(), and operator()().

|
virtual |
Reimplemented in MyVectorHandler, and STLVectorHandler.
Definition at line 227 of file vh.cc.
References iGetSize(), operator()(), and Resize().

|
pure virtual |
Reimplemented in MyVectorHandler, and STLVectorHandler.
Definition at line 93 of file vh.cc.
References ASSERT, iGetSize(), and operator()().
Referenced by StructDispNode::AfterPredict(), StructNode::AfterPredict(), ModalForce::AssRes(), InlineFriction::AssRes(), asynchronous_machine::AssRes(), ModalMappingExt::AssRes(), Motor::AssRes(), ModalExt::AssRes(), StructDispNode::BeforePredict(), StructNode::BeforePredict(), InlineFriction::InitialAssRes(), DistanceJointWithOffset::InitialAssRes(), ClampJoint::InitialAssRes(), DistanceJoint::SetInitialValue(), DistanceJointWithOffset::SetInitialValue(), StructDispNode::SetInitialValue(), Modal::SetInitialValue(), StructNode::SetInitialValue(), DistanceJoint::SetValue(), asynchronous_machine::SetValue(), PlaneHingeJoint::SetValue(), AutomaticStructDispElem::SetValue(), DistanceJointWithOffset::SetValue(), StructDispNode::SetValue(), AutomaticStructElem::SetValue(), Modal::SetValue(), ClampJoint::SetValue(), ModuleIMUConstraint::SetValue(), and StructNode::SetValue().

|
pure virtual |
Implemented in MySubVectorHandler, SchurVectorHandler, MyVectorHandler, and STLVectorHandler.
Referenced by ModuleMDS::AssRes(), DispMeasure::AssRes(), Accelerometer::AssRes(), InLineJoint::AssRes(), InlineFriction::AssRes(), LinearVelocityJoint::AssRes(), DistanceJoint::AssRes(), UniversalHingeJoint::AssRes(), PrismaticJoint::AssRes(), GenelStateSpaceSISO::AssRes(), InPlaneJoint::AssRes(), DrivenElem::AssRes(), Actuator::AssRes(), ModuleFMU::AssRes(), asynchronous_machine::AssRes(), SwashPlate::AssRes(), Motor::AssRes(), RotorTrimBase::AssRes(), TranslAccel::AssRes(), PlaneHingeJoint::AssRes(), AbstractForce::AssRes(), BeamSliderJoint::AssRes(), AngularVelocityJoint::AssRes(), InLineWithOffsetJoint::AssRes(), GenelStateSpaceMIMO::AssRes(), TotalEquation::AssRes(), TotalJoint::AssRes(), DistanceJointWithOffset::AssRes(), TheodorsenAeroData::AssRes(), UniversalRotationJoint::AssRes(), RotAccel::AssRes(), InPlaneWithOffsetJoint::AssRes(), AbstractInternalForce::AssRes(), UniversalPinJoint::AssRes(), PlaneRotationJoint::AssRes(), Modal::AssRes(), Wheel4::AssRes(), TotalPinJoint::AssRes(), AxialRotationJoint::AssRes(), PlanePinJoint::AssRes(), DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), Gmres::Backsolve(), NRTrim::DoTrim(), InlineFriction::InitialAssRes(), DistanceJoint::InitialAssRes(), LinearVelocityJoint::InitialAssRes(), InLineJoint::InitialAssRes(), UniversalHingeJoint::InitialAssRes(), InPlaneJoint::InitialAssRes(), PrismaticJoint::InitialAssRes(), PlaneHingeJoint::InitialAssRes(), AngularVelocityJoint::InitialAssRes(), InLineWithOffsetJoint::InitialAssRes(), DistanceJointWithOffset::InitialAssRes(), UniversalRotationJoint::InitialAssRes(), TotalEquation::InitialAssRes(), InPlaneWithOffsetJoint::InitialAssRes(), TotalJoint::InitialAssRes(), UniversalPinJoint::InitialAssRes(), PlaneRotationJoint::InitialAssRes(), TotalPinJoint::InitialAssRes(), AxialRotationJoint::InitialAssRes(), PlanePinJoint::InitialAssRes(), FullMatrixHandler::MatTVecMul_base(), FullMatrixHandler::MatVecMul_base(), Step1Integrator::PredictDof(), Step2Integrator::PredictDof(), ThirdOrderIntegrator::PredictDof_for_AfterPredict(), SchurVectorHandler::PutCoef(), SubVectorHandler::PutItem(), ThirdOrderIntegrator::RealPredictDof(), Modal::SetInitialValue(), Wheel4::SetInitialValue(), DataManager::SetScale(), SetupSystem(), DispMeasure::SetValue(), Accelerometer::SetValue(), GenelClamp::SetValue(), InlineFriction::SetValue(), Pipe::SetValue(), Actuator::SetValue(), Accumulator::SetValue(), PlaneHingeJoint::SetValue(), TranslAccel::SetValue(), GenelDistance::SetValue(), ModLugreFriction::SetValue(), Dynamic_pipe::SetValue(), Tank::SetValue(), RotAccel::SetValue(), Control_valve2::SetValue(), ContactJoint::SetValue(), DiscreteCoulombFriction::SetValue(), DynamicPipe::SetValue(), Dynamic_control_valve::SetValue(), Modal::SetValue(), ScalarDifferentialNode::SetValue(), Pressure_flow_control_valve::SetValue(), GenelMass::SetValue(), ScalarAlgebraicNode::SetValue(), Pressure_valve::SetValue(), Flow_valve::SetValue(), DynamicInflowRotor::SetValue(), and PetersHeRotor::SetValue().
|
pure virtual |
Implemented in MySubVectorHandler, SchurVectorHandler, MyVectorHandler, and STLVectorHandler.
Referenced by InverseDynamicsStepSolver::Advance(), BulkSpringSupport::AssRes(), ImplicitStepIntegrator::EvalProd(), InverseDynamicsStepSolver::EvalProd(), DataManager::InitialJointAssembly(), LineSearchSolver::LineSearch(), MatrixHandler::MatTVecMul(), MatrixHandler::MatVecMul(), SchurVectorHandler::Reset(), LineSearchSolver::Residual(), ResizeReset(), BiCGStab::Solve(), NewtonRaphsonSolver::Solve(), and Gmres::Solve().
|
pure virtual |
Implemented in MySubVectorHandler, SchurVectorHandler, MyVectorHandler, and STLVectorHandler.
Referenced by ass_res(), StreamOutElem::AssRes(), DispMeasure::AssRes(), LinearAccelerationJoint::AssRes(), MinorLoss::AssRes(), GenelClamp::AssRes(), Pipe::AssRes(), Control_valve::AssRes(), AircraftInstruments::AssRes(), Wheel2::AssRes(), Gravity::AssRes(), ModalMappingExt::AssRes(), Accumulator::AssRes(), DrivenElem::AssRes(), RotorTrimBase::AssRes(), StructExtForce::AssRes(), StructMappingExtForce::AssRes(), BulkSpringSupport::AssRes(), TranslAccel::AssRes(), Inertia::AssRes(), AirProperties::AssRes(), ThreeWayMinorLoss::AssRes(), ContactJoint::AssRes(), AngularAccelerationJoint::AssRes(), Dynamic_pipe::AssRes(), Tank::AssRes(), ModalExt::AssRes(), RotAccel::AssRes(), Control_valve2::AssRes(), Orifice::AssRes(), StaticMass::AssRes(), NoRotor::AssRes(), StaticVariableBody::AssRes(), DynamicPipe::AssRes(), Dynamic_control_valve::AssRes(), UniformRotor::AssRes(), ClampJoint::AssRes(), Pressure_flow_control_valve::AssRes(), TotalPinJoint::AssRes(), CyclocopterNoInflow::AssRes(), GlauertRotor::AssRes(), Pressure_valve::AssRes(), ManglerRotor::AssRes(), StaticBody::AssRes(), Flow_valve::AssRes(), CyclocopterUniform1D::AssRes(), DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), CyclocopterUniform2D::AssRes(), CyclocopterPolimi::AssRes(), initial_ass_res(), LinearAccelerationJoint::InitialAssRes(), Wheel2::InitialAssRes(), DrivenElem::InitialAssRes(), DynamicMass::InitialAssRes(), AngularAccelerationJoint::InitialAssRes(), Inertia::InitialAssRes(), BeamSliderJoint::InitialAssRes(), ContactJoint::InitialAssRes(), NestedElem::InitialAssRes(), StaticMass::InitialAssRes(), Membrane4EAS::InitialAssRes(), Wheel4::InitialAssRes(), AbsoluteCouple::InitialAssRes(), Shell4EAS::InitialAssRes(), Shell4EASANS::InitialAssRes(), int_ass_res(), int_initial_ass_res(), operator=(), and ResizeReset().
|
virtual |
Definition at line 55 of file vh.cc.
References Reset(), and Resize().
Referenced by ThermalCapacitance::AssRes(), ThermalSource::AssRes(), ThermalResistance::AssRes(), ModuleTemplate::AssRes(), ModuleMDS::AssRes(), ModuleIMU::AssRes(), AbsoluteDispForce::AssRes(), ModalForce::AssRes(), Accelerometer::AssRes(), InLineJoint::AssRes(), InlineFriction::AssRes(), LinearVelocityJoint::AssRes(), DistanceJoint::AssRes(), LoadIncNorm::AssRes(), HydrodynamicPlainBearing::AssRes(), UniversalHingeJoint::AssRes(), SphericalHingeJoint::AssRes(), PrismaticJoint::AssRes(), GenelStateSpaceSISO::AssRes(), InPlaneJoint::AssRes(), DrivenElem::AssRes(), Actuator::AssRes(), ModuleFMU::AssRes(), TikhonovRegularization::AssRes(), asynchronous_machine::AssRes(), Wheel2::AssRes(), ModalMappingExt::AssRes(), RodBezier::AssRes(), GimbalRotationJoint::AssRes(), SwashPlate::AssRes(), Motor::AssRes(), Rod::AssRes(), StructExtForce::AssRes(), PointSurfaceContact::AssRes(), StructMappingExtForce::AssRes(), GenericAerodynamicForce::AssRes(), AbsoluteInternalDispForce::AssRes(), DriveDisplacementJoint::AssRes(), Brake::AssRes(), GenelDistance::AssRes(), DriveHingeJoint::AssRes(), ViscousBody::AssRes(), AutomaticStructDispElem::AssRes(), PlaneHingeJoint::AssRes(), DynamicMass::AssRes(), AbstractForce::AssRes(), DynamicVariableBody::AssRes(), DynamicRegularization::AssRes(), BeamSliderJoint::AssRes(), AerodynamicModal::AssRes(), AngularVelocityJoint::AssRes(), InLineWithOffsetJoint::AssRes(), ModuleNonsmoothNode::AssRes(), GenelStateSpaceMIMO::AssRes(), TotalEquation::AssRes(), ModalExt::AssRes(), TotalJoint::AssRes(), DistanceJointWithOffset::AssRes(), DeformableJoint::AssRes(), UniversalRotationJoint::AssRes(), PinJoint::AssRes(), AeroDynModule::AssRes(), GenelSpring::AssRes(), InPlaneWithOffsetJoint::AssRes(), ElasticAxialJoint::AssRes(), ElasticDispJoint::AssRes(), StaticMass::AssRes(), AbstractInternalForce::AssRes(), ViscoElasticRod::AssRes(), HBeam::AssRes(), ElasticHingeJoint::AssRes(), AbsoluteForce::AssRes(), Beam2::AssRes(), StaticVariableBody::AssRes(), GenelSpringSupport::AssRes(), Membrane4EAS::AssRes(), AutomaticStructElem::AssRes(), DriveDisplacementPinJoint::AssRes(), UniversalPinJoint::AssRes(), PlaneRotationJoint::AssRes(), Modal::AssRes(), AerodynamicBody::AssRes(), RodWithOffset::AssRes(), GenelCrossSpringSupport::AssRes(), FollowerForce::AssRes(), ClampJoint::AssRes(), DiscreteControlElem::AssRes(), Wheel4::AssRes(), ElasticDispJointInv::AssRes(), Beam::AssRes(), ViscousAxialJoint::AssRes(), Shell4EAS::AssRes(), GenelCrossSpringDamperSupport::AssRes(), TotalReaction::AssRes(), AbsoluteCouple::AssRes(), Shell4EASANS::AssRes(), DynamicBody::AssRes(), ModuleIMUConstraint::AssRes(), TotalPinJoint::AssRes(), AerodynamicBeam::AssRes(), TimeStep::AssRes(), GenelSpringDamperSupport::AssRes(), FollowerCouple::AssRes(), ViscousHingeJoint::AssRes(), ViscousDispJoint::AssRes(), ViscoElasticAxialJoint::AssRes(), ModalBody::AssRes(), GenelMass::AssRes(), AxialRotationJoint::AssRes(), StaticBody::AssRes(), AerodynamicBeam2::AssRes(), AbsoluteInternalForce::AssRes(), TotalForce::AssRes(), ViscoElasticDispJoint::AssRes(), LoadIncForce::AssRes(), PlanePinJoint::AssRes(), FollowerInternalForce::AssRes(), ViscoElasticHingeJoint::AssRes(), AbsoluteInternalCouple::AssRes(), FollowerInternalCouple::AssRes(), ModuleTemplate::InitialAssRes(), ModuleMDS::InitialAssRes(), ModuleIMU::InitialAssRes(), AbsoluteDispForce::InitialAssRes(), ModalForce::InitialAssRes(), InlineFriction::InitialAssRes(), DistanceJoint::InitialAssRes(), HydrodynamicPlainBearing::InitialAssRes(), LinearVelocityJoint::InitialAssRes(), InLineJoint::InitialAssRes(), LoadIncNorm::InitialAssRes(), UniversalHingeJoint::InitialAssRes(), InPlaneJoint::InitialAssRes(), ModuleFMU::InitialAssRes(), asynchronous_machine::InitialAssRes(), CyclocopterInflow::InitialAssRes(), PrismaticJoint::InitialAssRes(), SphericalHingeJoint::InitialAssRes(), TikhonovRegularization::InitialAssRes(), RodBezier::InitialAssRes(), GimbalRotationJoint::InitialAssRes(), PointSurfaceContact::InitialAssRes(), Rod::InitialAssRes(), AbsoluteInternalDispForce::InitialAssRes(), DriveDisplacementJoint::InitialAssRes(), ViscousBody::InitialAssRes(), Brake::InitialAssRes(), DriveHingeJoint::InitialAssRes(), PlaneHingeJoint::InitialAssRes(), DynamicVariableBody::InitialAssRes(), DynamicRegularization::InitialAssRes(), ModuleNonsmoothNode::InitialAssRes(), AngularVelocityJoint::InitialAssRes(), InLineWithOffsetJoint::InitialAssRes(), DeformableJoint::InitialAssRes(), AerodynamicModal::InitialAssRes(), AeroDynModule::InitialAssRes(), DistanceJointWithOffset::InitialAssRes(), UniversalRotationJoint::InitialAssRes(), PinJoint::InitialAssRes(), TotalEquation::InitialAssRes(), InPlaneWithOffsetJoint::InitialAssRes(), TotalJoint::InitialAssRes(), ViscoElasticRod::InitialAssRes(), ElasticAxialJoint::InitialAssRes(), ElasticDispJoint::InitialAssRes(), ExtForce::InitialAssRes(), AbsoluteForce::InitialAssRes(), ElasticHingeJoint::InitialAssRes(), StaticVariableBody::InitialAssRes(), HBeam::InitialAssRes(), DriveDisplacementPinJoint::InitialAssRes(), AerodynamicBody::InitialAssRes(), UniversalPinJoint::InitialAssRes(), PlaneRotationJoint::InitialAssRes(), Modal::InitialAssRes(), RodWithOffset::InitialAssRes(), Beam2::InitialAssRes(), FollowerForce::InitialAssRes(), ClampJoint::InitialAssRes(), ElasticDispJointInv::InitialAssRes(), ViscousAxialJoint::InitialAssRes(), TotalReaction::InitialAssRes(), DynamicBody::InitialAssRes(), ModuleIMUConstraint::InitialAssRes(), AerodynamicBeam::InitialAssRes(), Beam::InitialAssRes(), TimeStep::InitialAssRes(), FollowerCouple::InitialAssRes(), TotalPinJoint::InitialAssRes(), ViscousHingeJoint::InitialAssRes(), ViscousDispJoint::InitialAssRes(), ViscoElasticAxialJoint::InitialAssRes(), AxialRotationJoint::InitialAssRes(), AerodynamicBeam2::InitialAssRes(), StaticBody::InitialAssRes(), AbsoluteInternalForce::InitialAssRes(), TotalForce::InitialAssRes(), ViscoElasticDispJoint::InitialAssRes(), LoadIncForce::InitialAssRes(), PlanePinJoint::InitialAssRes(), FollowerInternalForce::InitialAssRes(), ViscoElasticHingeJoint::InitialAssRes(), AbsoluteInternalCouple::InitialAssRes(), FollowerInternalCouple::InitialAssRes(), and Solver::Prepare().

|
virtual |
Reimplemented in MyVectorHandler, and STLVectorHandler.
Definition at line 108 of file vh.cc.
References ASSERT, iGetSize(), and operator()().
Referenced by Gmres::Backsolve(), and BiCGStab::Solve().
|
virtual |
Reimplemented in MyVectorHandler, and STLVectorHandler.
Definition at line 125 of file vh.cc.
References ASSERT, iGetSize(), and operator()().
|
virtual |
Reimplemented in MyVectorHandler, and STLVectorHandler.
Definition at line 145 of file vh.cc.
References ASSERT, iGetSize(), and operator()().
Referenced by ImplicitStepIntegrator::EvalProd(), InverseDynamicsStepSolver::EvalProd(), and LineSearchSolver::LineSearch().
Reimplemented in MyVectorHandler, and STLVectorHandler.
Definition at line 78 of file vh.cc.
References ASSERT, iGetSize(), and operator()().
Referenced by InLineJoint::AssRes(), DistanceJoint::AssRes(), UniversalHingeJoint::AssRes(), PrismaticJoint::AssRes(), SphericalHingeJoint::AssRes(), Actuator::AssRes(), asynchronous_machine::AssRes(), Wheel2::AssRes(), AbsoluteInternalDispForce::AssRes(), Brake::AssRes(), AutomaticStructDispElem::AssRes(), PlaneHingeJoint::AssRes(), DynamicMass::AssRes(), DynamicVariableBody::AssRes(), BeamSliderJoint::AssRes(), InLineWithOffsetJoint::AssRes(), TotalJoint::AssRes(), DistanceJointWithOffset::AssRes(), UniversalRotationJoint::AssRes(), PinJoint::AssRes(), ViscoElasticRod::AssRes(), StaticMass::AssRes(), StaticVariableBody::AssRes(), AutomaticStructElem::AssRes(), PlaneRotationJoint::AssRes(), Modal::AssRes(), ClampJoint::AssRes(), TotalReaction::AssRes(), DynamicBody::AssRes(), ModuleIMUConstraint::AssRes(), TotalPinJoint::AssRes(), AxialRotationJoint::AssRes(), StaticBody::AssRes(), AbsoluteInternalForce::AssRes(), TotalForce::AssRes(), PlanePinJoint::AssRes(), FollowerInternalForce::AssRes(), AbsoluteInternalCouple::AssRes(), FollowerInternalCouple::AssRes(), Beam2::AssStiffnessVec(), HBeam::AssStiffnessVec(), Beam::AssStiffnessVec(), ViscoElasticBeam2::AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), GimbalRotationJoint::AssVec(), DriveDisplacementJoint::AssVec(), ViscousBody::AssVec(), DriveHingeJoint::AssVec(), Rod::AssVec(), ElasticAxialJoint::AssVec(), ElasticHingeJoint::AssVec(), ElasticDispJoint::AssVec(), DriveDisplacementPinJoint::AssVec(), ElasticJoint::AssVec(), ViscousAxialJoint::AssVec(), ElasticDispJointInv::AssVec(), RodWithOffset::AssVec(), ElasticHingeJointInv::AssVec(), ElasticJointInv::AssVec(), ViscousHingeJoint::AssVec(), ViscousDispJoint::AssVec(), ViscoElasticAxialJoint::AssVec(), ViscousJoint::AssVec(), ViscousHingeJointInv::AssVec(), ViscoElasticJoint::AssVec(), ViscoElasticDispJoint::AssVec(), ViscoElasticHingeJoint::AssVec(), ViscoElasticHingeJointInv::AssVec(), Mass::AssVecRBK_int(), VariableBody::AssVecRBK_int(), Body::AssVecRBK_int(), InLineJoint::InitialAssRes(), UniversalHingeJoint::InitialAssRes(), SphericalHingeJoint::InitialAssRes(), AbsoluteInternalDispForce::InitialAssRes(), DriveDisplacementJoint::InitialAssRes(), DriveHingeJoint::InitialAssRes(), PlaneHingeJoint::InitialAssRes(), InLineWithOffsetJoint::InitialAssRes(), UniversalRotationJoint::InitialAssRes(), PinJoint::InitialAssRes(), TotalJoint::InitialAssRes(), ViscoElasticRod::InitialAssRes(), DriveDisplacementPinJoint::InitialAssRes(), UniversalPinJoint::InitialAssRes(), PlaneRotationJoint::InitialAssRes(), Modal::InitialAssRes(), ViscousAxialJoint::InitialAssRes(), TotalReaction::InitialAssRes(), TotalPinJoint::InitialAssRes(), ViscousHingeJoint::InitialAssRes(), ViscousDispJoint::InitialAssRes(), ViscoElasticAxialJoint::InitialAssRes(), AxialRotationJoint::InitialAssRes(), AbsoluteInternalForce::InitialAssRes(), TotalForce::InitialAssRes(), ViscoElasticDispJoint::InitialAssRes(), PlanePinJoint::InitialAssRes(), ViscoElasticHingeJoint::InitialAssRes(), FollowerInternalForce::InitialAssRes(), AbsoluteInternalCouple::InitialAssRes(), and FollowerInternalCouple::InitialAssRes().
 1.8.7
1.8.7 
