|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
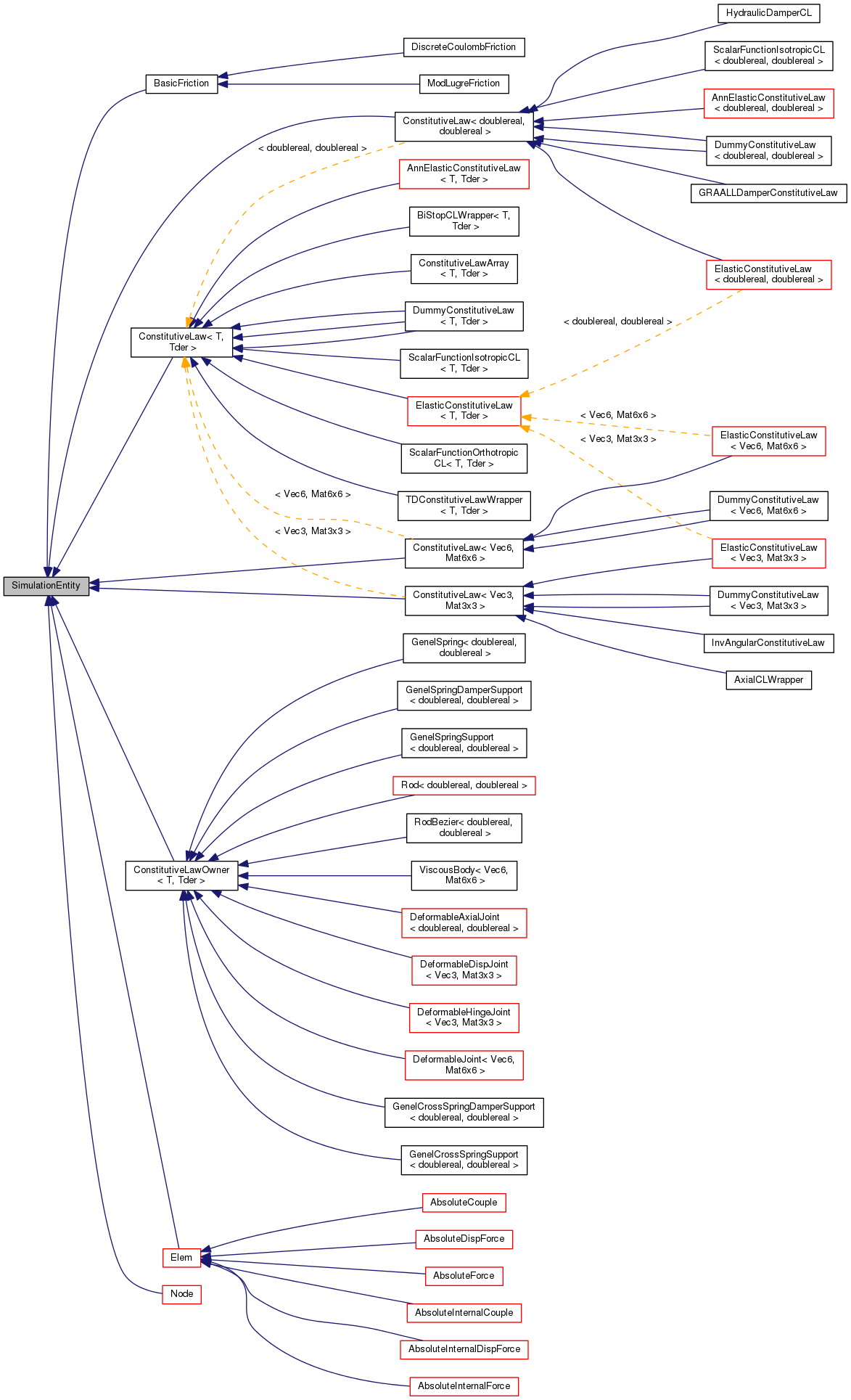
#include <simentity.h>
Public Types | |
| typedef std::vector< Hint * > | Hints |
Public Member Functions | |
| SimulationEntity (void) | |
| virtual | ~SimulationEntity (void) |
| virtual unsigned int | iGetNumDof (void) const =0 |
| virtual std::ostream & | DescribeDof (std::ostream &out, const char *prefix="", bool bInitial=false) const =0 |
| virtual void | DescribeDof (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const =0 |
| virtual std::ostream & | DescribeEq (std::ostream &out, const char *prefix="", bool bInitial=false) const =0 |
| virtual void | DescribeEq (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const =0 |
| virtual bool | bIsValidIndex (unsigned int i) const |
| virtual DofOrder::Order | GetDofType (unsigned int i) const =0 |
| virtual DofOrder::Order | GetEqType (unsigned int i) const |
| virtual void | SetValue (DataManager *pDM, VectorHandler &X, VectorHandler &XP, SimulationEntity::Hints *h=0) |
| virtual Hint * | ParseHint (DataManager *pDM, const char *s) const |
| virtual void | BeforePredict (VectorHandler &, VectorHandler &, VectorHandler &, VectorHandler &) const |
| virtual void | AfterPredict (VectorHandler &X, VectorHandler &XP) |
| virtual void | Update (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | DerivativesUpdate (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | Update (const VectorHandler &XCurr, InverseDynamics::Order iOrder) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP, const VectorHandler &XPP) |
| virtual unsigned int | iGetNumPrivData (void) const |
| virtual unsigned int | iGetPrivDataIdx (const char *s) const |
| virtual doublereal | dGetPrivData (unsigned int i) const |
| virtual std::ostream & | OutputAppend (std::ostream &out) const |
| virtual void | ReadInitialState (MBDynParser &HP) |
Definition at line 76 of file simentity.h.
| typedef std::vector<Hint *> SimulationEntity::Hints |
Definition at line 89 of file simentity.h.
| SimulationEntity::SimulationEntity | ( | void | ) |
Definition at line 43 of file simentity.cc.
References NO_OP.
|
virtual |
Definition at line 48 of file simentity.cc.
References NO_OP.
|
virtual |
Reimplemented in ModalNode, DynamicStructNode, CyclocopterPolimi, CyclocopterUniform2D, PlanePinJoint, CyclocopterUniform1D, ViscoElasticHingeJoint, DynamicStructDispNode, ViscoElasticBeam, ViscoElasticDispJoint, ViscoElasticJoint, AxialRotationJoint, ViscousJoint, ViscoElasticBeam2, ViscousDispJoint, ViscoElasticAxialJoint, GenelSpringDamperSupport, ViscousHingeJoint, TotalPinJoint, Wheel4, ElasticJointInv, TotalReaction, GenelCrossSpringDamperSupport, ElasticDispJointInv, DiscreteControlElem, Beam, ViscousAxialJoint, RodWithOffset, GenelCrossSpringSupport, PlaneRotationJoint, LoadableElem, DynamicPipe, ExtForce, ElasticJoint, GenelSpringSupport, InducedVelocity, Aerodynamic2DElem< iNN >, Aerodynamic2DElem< 1 >, Aerodynamic2DElem< 2 >, Aerodynamic2DElem< 3 >, Beam2, ViscoElasticRod, ElasticDispJoint, HBeam, AeroDynModule, ElasticHingeJoint, ElasticAxialJoint, GenelSpring, Dynamic_pipe, ViscousBody, ModuleNonsmoothNode, TotalJoint, DynamicRegularization, TotalEquation, PlaneHingeJoint, Rotor, NestedElem, Brake, LoadIncNorm, Rod, CyclocopterInflow, Pipe, RodBezier, DrivenElem, RTMBDynOutElem, and BufferStreamElem_base.
Definition at line 120 of file simentity.cc.
References NO_OP.
Referenced by NestedElem::AfterConvergence(), DrivenElem::AfterConvergence(), DataManager::AfterConvergence(), and DataManager::IDAfterConvergence().
|
virtual |
Reimplemented in StructNode, ViscoElasticBeam, ViscoElasticDispJoint, ViscousDispJoint, TotalPinJoint, TotalReaction, Beam, Beam2, StructDispNode, ElasticJoint, ElasticHingeJoint, ElasticDispJoint, ElasticAxialJoint, NestedElem, Rod, TotalJoint, TotalEquation, RodBezier, DrivenElem, RTMBDynOutElem, and BufferStreamElem_base.
Definition at line 128 of file simentity.cc.
References NO_OP.
|
virtual |
Reimplemented in DummyStructNode, StructNode, LoadIncForce, ParameterNode, ViscoElasticBeam, ViscoElasticDispJoint, ViscoElasticJoint, ViscousJoint, ViscousDispJoint, ViscoElasticBeam2, Wheel4, ElasticJointInv, Beam, Body, ElasticDispJointInv, DriveDisplacementPinJoint, StructDispNode, LoadableElem, ScalarNode, ElasticJoint, ExtForce, Beam2, HBeam, PiezoActuatorVEBeam, ElasticDispJoint, PiezoActuatorVEBeam2, AeroDynModule, ViscousBody, ModuleNonsmoothNode, DriveHingeJoint, DriveDisplacementJoint, DeformableHingeJoint, NestedElem, GimbalRotationJoint, LoadIncNorm, VariableBody, DeformableAxialJoint, PiezoActuatorBeam, PiezoActuatorBeam2, asynchronous_machine, and DrivenElem.
Definition at line 91 of file simentity.cc.
References NO_OP.
Referenced by DrivenElem::AfterPredict(), NestedElem::AfterPredict(), and DataManager::AfterPredict().
|
virtual |
Reimplemented in DummyStructNode, DynamicStructNode, StructNode, DynamicStructDispNode, StructDispNode, LoadableElem, NestedElem, and DrivenElem.
Definition at line 82 of file simentity.cc.
References NO_OP.
Referenced by DrivenElem::BeforePredict(), NestedElem::BeforePredict(), and DataManager::BeforePredict().
Definition at line 54 of file simentity.cc.
References iGetNumDof().

|
virtual |
Reimplemented in DummyStructNode, StructNode, and StructDispNode.
Definition at line 105 of file simentity.cc.
References Update().
Referenced by DataManager::DerivativesUpdate().

|
pure virtual |
Implemented in ModalNode, DynamicStructNode, StructNode, PlanePinJoint, DynamicStructDispNode, AxialRotationJoint, TotalPinJoint, ConstitutiveLawOwner< T, Tder >, TotalReaction, Modal, ClampJoint, PlaneRotationJoint, DiscreteCoulombFriction, DriveDisplacementPinJoint, Aerodynamic2DElem< iNN >, Aerodynamic2DElem< 1 >, Aerodynamic2DElem< 2 >, Aerodynamic2DElem< 3 >, StructDispNode, ModLugreFriction, Elem, ConstitutiveLaw< T, Tder >, ConstitutiveLaw< Vec6, Mat6x6 >, ConstitutiveLaw< Vec3, Mat3x3 >, ConstitutiveLaw< doublereal, doublereal >, TotalJoint, TotalEquation, Node, PlaneHingeJoint, DriveHingeJoint, DriveDisplacementJoint, NestedElem, asynchronous_machine, and InlineFriction.
Referenced by PlaneHingeJoint::DescribeDof(), and AxialRotationJoint::DescribeDof().
|
pure virtual |
Implemented in ModalNode, DynamicStructNode, StructNode, PlanePinJoint, DynamicStructDispNode, AxialRotationJoint, TotalPinJoint, ConstitutiveLawOwner< T, Tder >, TotalReaction, Modal, ClampJoint, PlaneRotationJoint, DiscreteCoulombFriction, DriveDisplacementPinJoint, Aerodynamic2DElem< iNN >, Aerodynamic2DElem< 1 >, Aerodynamic2DElem< 2 >, Aerodynamic2DElem< 3 >, StructDispNode, ModLugreFriction, Elem, ConstitutiveLaw< T, Tder >, ConstitutiveLaw< Vec6, Mat6x6 >, ConstitutiveLaw< Vec3, Mat3x3 >, ConstitutiveLaw< doublereal, doublereal >, TotalJoint, TotalEquation, Node, PlaneHingeJoint, DriveHingeJoint, DriveDisplacementJoint, and NestedElem.
|
pure virtual |
Implemented in ModalNode, DynamicStructNode, StructNode, PlanePinJoint, DynamicStructDispNode, AxialRotationJoint, TotalPinJoint, ConstitutiveLawOwner< T, Tder >, Modal, ClampJoint, PlaneRotationJoint, DiscreteCoulombFriction, DriveDisplacementPinJoint, Aerodynamic2DElem< iNN >, Aerodynamic2DElem< 1 >, Aerodynamic2DElem< 2 >, Aerodynamic2DElem< 3 >, StructDispNode, ModLugreFriction, Elem, ConstitutiveLaw< T, Tder >, ConstitutiveLaw< Vec6, Mat6x6 >, ConstitutiveLaw< Vec3, Mat3x3 >, ConstitutiveLaw< doublereal, doublereal >, TotalJoint, TotalEquation, Node, PlaneHingeJoint, DriveHingeJoint, DriveDisplacementJoint, NestedElem, asynchronous_machine, and InlineFriction.
Referenced by PlaneHingeJoint::DescribeEq(), and AxialRotationJoint::DescribeEq().
|
pure virtual |
Implemented in ModalNode, DynamicStructNode, StructNode, PlanePinJoint, DynamicStructDispNode, AxialRotationJoint, TotalPinJoint, ConstitutiveLawOwner< T, Tder >, Modal, ClampJoint, PlaneRotationJoint, DiscreteCoulombFriction, DriveDisplacementPinJoint, Aerodynamic2DElem< iNN >, Aerodynamic2DElem< 1 >, Aerodynamic2DElem< 2 >, Aerodynamic2DElem< 3 >, StructDispNode, ModLugreFriction, ConstitutiveLaw< T, Tder >, ConstitutiveLaw< Vec6, Mat6x6 >, ConstitutiveLaw< Vec3, Mat3x3 >, ConstitutiveLaw< doublereal, doublereal >, Elem, TotalJoint, TotalEquation, Node, PlaneHingeJoint, DriveHingeJoint, DriveDisplacementJoint, and NestedElem.
|
virtual |
Reimplemented in StructNode, ViscoElasticHingeJointInv, PlanePinJoint, ShockAbsorberConstitutiveLaw< doublereal, doublereal >, ViscoElasticBeam, AxialRotationJoint, ViscousHingeJointInv, TotalPinJoint, ViscoElasticBeam2, Beam, TimeStep, ModuleIMUConstraint, TotalReaction, ScalarDifferentialNode, ConstitutiveLawOwner< T, Tder >, ClampJoint, Modal, Wheel4, Beam2, Body, DiscreteControlElem, PlaneRotationJoint, ElasticHingeJointInv, DriveDisplacementPinJoint, LoadableElem, StructDispNode, AutomaticStructElem, HBeam, GenelSpringSupport, TotalJoint, TotalEquation, DistanceJointWithOffset, AngularVelocityJoint, Node, Rod, AirProperties, Inertia, PlaneHingeJoint, AngularAccelerationJoint, RodBezier, AutomaticStructDispElem, DriveHingeJoint, DriveDisplacementJoint, Brake, DeformableHingeJoint, NestedElem, DeformableJoint, DeformableDispJoint, DeformableAxialJoint, GenericAerodynamicForce, GimbalRotationJoint, InducedVelocity, DistanceJoint, ViscousBody, AircraftInstruments, VariableBody, LinearVelocityJoint, DrivenElem, ModuleFMU, Motor, LinearAccelerationJoint, Mass, asynchronous_machine, LoadIncNorm, InlineFriction, and ModuleIMU.
Definition at line 149 of file simentity.cc.
References MBDYN_EXCEPT_ARGS.
Referenced by Wheel4::AfterConvergence(), Wheel4::AssRes(), PrivDriveCaller::dGet(), DrivenElem::dGetPrivData(), NestedElem::dGetPrivData(), Elem2Param::dGetX(), StrainGageParam::dGetX(), RotorTrim::GetData(), PrivPlugIn::GetVal(), model_elem(), and model_node().
|
pure virtual |
Implemented in Node2Scalar, PlanePinJoint, Flow_valve, ParameterNode, Pressure_valve, GenelMass, AxialRotationJoint, ScalarAlgebraicNode, Pressure_flow_control_valve, TotalPinJoint, ModuleIMUConstraint, Wheel4, ConstitutiveLawOwner< T, Tder >, Shell4EASANS, TotalReaction, ScalarDifferentialNode, DiscreteControlElem, Shell4EAS, Modal, InducedVelocityElem, Dynamic_control_valve, ClampJoint, UniversalPinJoint, PlaneRotationJoint, DiscreteCoulombFriction, DriveDisplacementPinJoint, DynamicPipe, LoadableElem, Membrane4EAS, Aerodynamic2DElem< iNN >, Aerodynamic2DElem< 1 >, Aerodynamic2DElem< 2 >, Aerodynamic2DElem< 3 >, Orifice, StructDispNode, InPlaneWithOffsetJoint, Control_valve2, AeroDynModule, RotAccel, PinJoint, ModLugreFriction, UniversalRotationJoint, Tank, DistanceJointWithOffset, ConstitutiveLaw< T, Tder >, ConstitutiveLaw< Vec6, Mat6x6 >, ConstitutiveLaw< Vec3, Mat3x3 >, ConstitutiveLaw< doublereal, doublereal >, ModuleNonsmoothNode, Dynamic_pipe, AngularVelocityJoint, InLineWithOffsetJoint, Elem, GenelStateSpaceMIMO, BeamSliderJoint, TotalJoint, AerodynamicModal, AngularAccelerationJoint, TotalEquation, DeformableJoint, ThreeWayMinorLoss, PlaneHingeJoint, DeformableDispJoint, TranslAccel, ModuleFMU, DriveHingeJoint, GenelDistance, DriveDisplacementJoint, Brake, Motor, NestedElem, Accumulator, LoadIncNorm, ViscousBody, Actuator, asynchronous_machine, ContactJoint, GimbalRotationJoint, InPlaneJoint, Control_valve, InPlaneContactJoint, SphericalHingeJoint, Pipe, UniversalHingeJoint, PrismaticJoint, GenelStateSpaceSISO, LinearVelocityJoint, MinorLoss, DistanceJoint, ModuleMDS, LinearAccelerationJoint, InLineJoint, InlineFriction, Accelerometer, and GenelClamp.
Referenced by GenelClamp::AssRes(), GenelSpringDamperSupport::GenelSpringDamperSupport(), GetDofOrder(), Brake::GetDofType(), PlaneHingeJoint::GetDofType(), AxialRotationJoint::GetDofType(), DofPlugIn::ReadDofOrder(), ReadGenel(), and ReadScalarDof().
|
inlinevirtual |
Reimplemented in PlanePinJoint, AxialRotationJoint, TotalPinJoint, TotalReaction, Wheel4, Shell4EASANS, Shell4EAS, PlaneRotationJoint, Modal, ClampJoint, DiscreteCoulombFriction, DynamicPipe, Membrane4EAS, TotalJoint, PinJoint, InLineWithOffsetJoint, ModLugreFriction, DistanceJointWithOffset, PlaneHingeJoint, Brake, ModuleFMU, NestedElem, LoadIncNorm, SphericalHingeJoint, Actuator, GimbalRotationJoint, InLineJoint, PrismaticJoint, DistanceJoint, ModuleMDS, InlineFriction, and GenelClamp.
Definition at line 138 of file simentity.h.
References DofOrder::DIFFERENTIAL.
Referenced by DataManager::DofOwnerInit(), NestedElem::GetEqType(), Brake::GetEqType(), PlaneHingeJoint::GetEqType(), and AxialRotationJoint::GetEqType().
|
pure virtual |
Implemented in DummyStructNode, StaticStructNode, DynamicStructNode, PetersHeRotor, StaticStructDispNode, Node2Scalar, DynamicInflowRotor, Flow_valve, PlanePinJoint, ParameterNode, DynamicStructDispNode, Pressure_valve, GenelMass, AxialRotationJoint, Pressure_flow_control_valve, ModuleIMUConstraint, Wheel4, TotalPinJoint, Shell4EASANS, ConstitutiveLawOwner< T, Tder >, DiscreteControlElem, TotalReaction, Shell4EAS, Dynamic_control_valve, Modal, ClampJoint, UniversalPinJoint, DynamicPipe, PlaneRotationJoint, LoadableElem, DiscreteCoulombFriction, ScalarNode, DriveDisplacementPinJoint, Membrane4EAS, Aerodynamic2DElem< iNN >, Aerodynamic2DElem< 1 >, Aerodynamic2DElem< 2 >, Aerodynamic2DElem< 3 >, Orifice, Control_valve2, AeroDynModule, InPlaneWithOffsetJoint, RotAccel, PinJoint, UniversalRotationJoint, Tank, DistanceJointWithOffset, Dynamic_pipe, ModLugreFriction, AngularVelocityJoint, InLineWithOffsetJoint, GenelStateSpaceMIMO, InducedVelocity, Elem, ModuleNonsmoothNode, BeamSliderJoint, AngularAccelerationJoint, AerodynamicModal, DeformableJoint, DeformableHingeJoint, ConstitutiveLaw< T, Tder >, ConstitutiveLaw< Vec6, Mat6x6 >, ConstitutiveLaw< Vec3, Mat3x3 >, ConstitutiveLaw< doublereal, doublereal >, ThreeWayMinorLoss, TotalJoint, TranslAccel, ModuleFMU, DeformableDispJoint, DeformableAxialJoint, TotalEquation, GenelDistance, Motor, Brake, PlaneHingeJoint, RotorTrimBase, Accumulator, LoadIncNorm, DriveHingeJoint, Rod, ViscousBody, PointSurfaceContact, RodBezier, NestedElem, Actuator, DriveDisplacementJoint, asynchronous_machine, ContactJoint, GimbalRotationJoint, Control_valve, Pipe, InPlaneJoint, InPlaneContactJoint, SphericalHingeJoint, UniversalHingeJoint, PrismaticJoint, GenelStateSpaceSISO, MinorLoss, LinearVelocityJoint, ModuleMDS, LinearAccelerationJoint, InlineFriction, DistanceJoint, Accelerometer, InLineJoint, and GenelClamp.
Referenced by DataManager::AssConstrJac(), DataManager::AssConstrRes(), bIsValidIndex(), PlaneHingeJoint::DescribeDof(), AxialRotationJoint::DescribeDof(), PlaneHingeJoint::DescribeEq(), AxialRotationJoint::DescribeEq(), StructDispNode::GetDofType(), Brake::iGetNumDof(), PlaneHingeJoint::iGetNumDof(), AxialRotationJoint::iGetNumDof(), Node::iGetNumPrivData(), DofPlugIn::Read(), ReadScalarDof(), Brake::WorkSpaceDim(), PlaneHingeJoint::WorkSpaceDim(), and AxialRotationJoint::WorkSpaceDim().
|
virtual |
Reimplemented in StructNode, PlanePinJoint, LoadIncForce, ParameterNode, ShockAbsorberConstitutiveLaw< doublereal, doublereal >, AxialRotationJoint, TotalPinJoint, Beam, TimeStep, ModuleIMUConstraint, TotalReaction, ScalarDifferentialNode, ClampJoint, ConstitutiveLawOwner< T, Tder >, Modal, Wheel4, Beam2, Body, DiscreteControlElem, PlaneRotationJoint, DriveDisplacementPinJoint, LoadableElem, AutomaticStructElem, HBeam, StructDispNode, GenelSpringSupport, TotalJoint, TotalEquation, DistanceJointWithOffset, AeroDynModule, AngularVelocityJoint, Rod, AirProperties, Inertia, PlaneHingeJoint, Node, AngularAccelerationJoint, ModuleNonsmoothNode, RodBezier, AutomaticStructDispElem, DriveHingeJoint, Brake, DriveDisplacementJoint, DeformableHingeJoint, DeformableJoint, DeformableDispJoint, NestedElem, DeformableAxialJoint, GenericAerodynamicForce, GimbalRotationJoint, InducedVelocity, DistanceJoint, ViscousBody, AircraftInstruments, VariableBody, Wheel2, LinearVelocityJoint, ModuleFMU, Motor, LinearAccelerationJoint, Mass, asynchronous_machine, HydrodynamicPlainBearing, LoadIncNorm, InlineFriction, ModuleIMU, ModuleMDS, and ModuleTemplate.
Definition at line 136 of file simentity.cc.
Referenced by Elem2Param::Bind(), ShockAbsorberConstitutiveLaw< doublereal, doublereal >::dGetPrivData(), NestedElem::iGetNumPrivData(), PrivPlugIn::Read(), SimulationEntityDCR::Read(), DataManager::ReadElems(), PrivPlugIn::ReadIndex(), and PrivDriveCaller::Restart().
|
virtual |
Reimplemented in StructNode, PlanePinJoint, ShockAbsorberConstitutiveLaw< doublereal, doublereal >, AxialRotationJoint, ScalarAlgebraicNode, TotalPinJoint, Beam, TimeStep, ModuleIMUConstraint, TotalReaction, ScalarDifferentialNode, ConstitutiveLawOwner< T, Tder >, ClampJoint, Modal, Wheel4, Beam2, Body, DiscreteControlElem, PlaneRotationJoint, DriveDisplacementPinJoint, LoadableElem, AutomaticStructElem, HBeam, StructDispNode, GenelSpringSupport, TotalJoint, TotalEquation, DistanceJointWithOffset, AngularVelocityJoint, Rod, AirProperties, Node, Inertia, PlaneHingeJoint, AngularAccelerationJoint, RodBezier, AutomaticStructDispElem, DriveHingeJoint, DriveDisplacementJoint, Brake, DeformableHingeJoint, NestedElem, DeformableJoint, DeformableDispJoint, DeformableAxialJoint, GenericAerodynamicForce, GimbalRotationJoint, InducedVelocity, DistanceJoint, ViscousBody, AircraftInstruments, VariableBody, LinearVelocityJoint, ModuleFMU, Motor, LinearAccelerationJoint, Mass, asynchronous_machine, LoadIncNorm, InlineFriction, and ModuleIMU.
Definition at line 142 of file simentity.cc.
References MBDYN_EXCEPT_ARGS.
Referenced by StrainGageParam::Bind(), NestedElem::iGetPrivDataIdx(), model_elem(), model_node(), SimulationEntityDCR::Read(), DataManager::ReadElems(), PrivPlugIn::ReadIndex(), and RotorTrim::RotorTrim().
|
virtual |
Reimplemented in ShockAbsorberConstitutiveLaw< doublereal, doublereal >, ContContact3DCL, ConstitutiveLawOwner< T, Tder >, ContContactCL, ConstitutiveLawArray< T, Tder >, MusclePennestriCL, and TDConstitutiveLawWrapper< T, Tder >.
Definition at line 156 of file simentity.cc.
|
virtual |
Reimplemented in PlanePinJoint, AxialRotationJoint, TotalPinJoint, TotalReaction, PlaneRotationJoint, DriveDisplacementPinJoint, ElasticConstitutiveLaw< T, Tder >, ElasticConstitutiveLaw< Vec6, Mat6x6 >, ElasticConstitutiveLaw< Vec3, Mat3x3 >, ElasticConstitutiveLaw< doublereal, doublereal >, TotalJoint, TotalEquation, PlaneHingeJoint, DeformableJoint, DeformableHingeJoint, DeformableDispJoint, DeformableAxialJoint, SphericalHingeJoint, PrismaticJoint, DriveHingeJoint, ViscousBody, and DriveDisplacementJoint.
Definition at line 76 of file simentity.cc.
References ParseHint().
Referenced by DriveDisplacementJoint::ParseHint(), DriveHingeJoint::ParseHint(), ViscousBody::ParseHint(), DeformableDispJoint::ParseHint(), DeformableAxialJoint::ParseHint(), DeformableHingeJoint::ParseHint(), DeformableJoint::ParseHint(), PlaneHingeJoint::ParseHint(), DriveDisplacementPinJoint::ParseHint(), AxialRotationJoint::ParseHint(), and DataManager::ReadElems().

|
virtual |
Reimplemented in PlanePinJoint, ClampJoint, and PlaneHingeJoint.
Definition at line 161 of file simentity.cc.
References NO_OP.
|
virtual |
Reimplemented in DummyStructNode, StructNode, PetersHeRotor, DynamicInflowRotor, LoadIncForce, Flow_valve, PlanePinJoint, ParameterNode, StaticBody, ViscoElasticBeam, Pressure_valve, ScalarAlgebraicNode, GenelMass, AxialRotationJoint, TimeStep, ViscoElasticBeam2, DynamicBody, Pressure_flow_control_valve, ModuleIMUConstraint, Shell4EASANS, TotalPinJoint, ScalarDifferentialNode, ClampJoint, Wheel4, TotalReaction, Shell4EAS, Modal, Beam, Dynamic_control_valve, LoadableElem, StaticVariableBody, AutomaticStructElem, PlaneRotationJoint, DynamicPipe, StructDispNode, ElemGravityOwner, StaticMass, Membrane4EAS, ExtForce, Beam2, InducedVelocity, DriveDisplacementPinJoint, ContactJoint, HBeam, Aerodynamic2DElem< iNN >, Aerodynamic2DElem< 1 >, Aerodynamic2DElem< 2 >, Aerodynamic2DElem< 3 >, DistanceJointWithOffset, Joint, AeroDynModule, PiezoActuatorVEBeam, Control_valve2, RotAccel, PiezoActuatorVEBeam2, ElasticConstitutiveLaw< T, Tder >, ElasticConstitutiveLaw< Vec6, Mat6x6 >, ElasticConstitutiveLaw< Vec3, Mat3x3 >, ElasticConstitutiveLaw< doublereal, doublereal >, DynamicVariableBody, Tank, GenelStateSpaceMIMO, ModuleNonsmoothNode, Inertia, DynamicMass, Dynamic_pipe, AngularAccelerationJoint, AutomaticStructDispElem, TotalJoint, TotalEquation, GenelDistance, TranslAccel, PlaneHingeJoint, DeformableJoint, Motor, DeformableHingeJoint, Accumulator, Brake, Wheel2, asynchronous_machine, ModuleFMU, DistanceJoint, DeformableDispJoint, Actuator, DeformableAxialJoint, SphericalHingeJoint, CyclocopterInflow, PrismaticJoint, GenelStateSpaceSISO, LoadIncNorm, HydrodynamicPlainBearing, PiezoActuatorBeam, PiezoActuatorBeam2, Pipe, DriveHingeJoint, ViscousBody, InlineFriction, GenelClamp, DriveDisplacementJoint, LinearAccelerationJoint, Accelerometer, DispMeasure, ConstitutiveLawArray< T, Tder >, ModuleIMU, Elem2Param, ModuleMDS, ModuleTemplate, DrivenElem, NestedElem, SampleAndHold, BufferStreamElem_base, and BasicFriction.
Definition at line 63 of file simentity.cc.
References NO_OP.
Referenced by DrivenElem::AfterPredict(), NestedElem::SetValue(), DrivenElem::SetValue(), ViscousBody::SetValue(), DeformableAxialJoint::SetValue(), DeformableDispJoint::SetValue(), DeformableHingeJoint::SetValue(), DeformableJoint::SetValue(), and DataManager::SetValue().
|
virtual |
Reimplemented in PivotRelFrameDummyStructNode, RelFrameDummyStructNode, OffsetDummyStructNode, ModalNode, DynamicStructNode, StructNode, DynamicStructDispNode, ParameterNode, LoadableElem, StructDispNode, ExtForce, NestedElem, asynchronous_machine, and DrivenElem.
Definition at line 98 of file simentity.cc.
References NO_OP.
Referenced by ScalarNode::AfterPredict(), DerivativesUpdate(), DrivenElem::Update(), NestedElem::Update(), and DataManager::Update().
|
virtual |
Reimplemented in StructNode, ViscoElasticDispJoint, ViscousDispJoint, TotalPinJoint, ClampJoint, Beam2, ElasticJoint, StructDispNode, ElasticHingeJoint, ElasticDispJoint, ElasticAxialJoint, Joint, TotalJoint, NestedElem, Rod, RodBezier, and DrivenElem.
Definition at line 113 of file simentity.cc.
References NO_OP.
 1.8.7
1.8.7 
