|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
#include <module-wheel4.h>
Public Member Functions | |
| Wheel4 (unsigned uLabel, const DofOwner *pDO, DataManager *pDM, MBDynParser &HP) | |
| virtual | ~Wheel4 (void) |
| virtual void | OutputPrepare (OutputHandler &OH) |
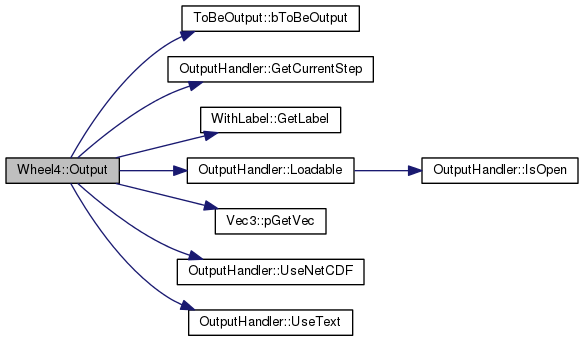
| virtual void | Output (OutputHandler &OH) const |
| virtual void | WorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
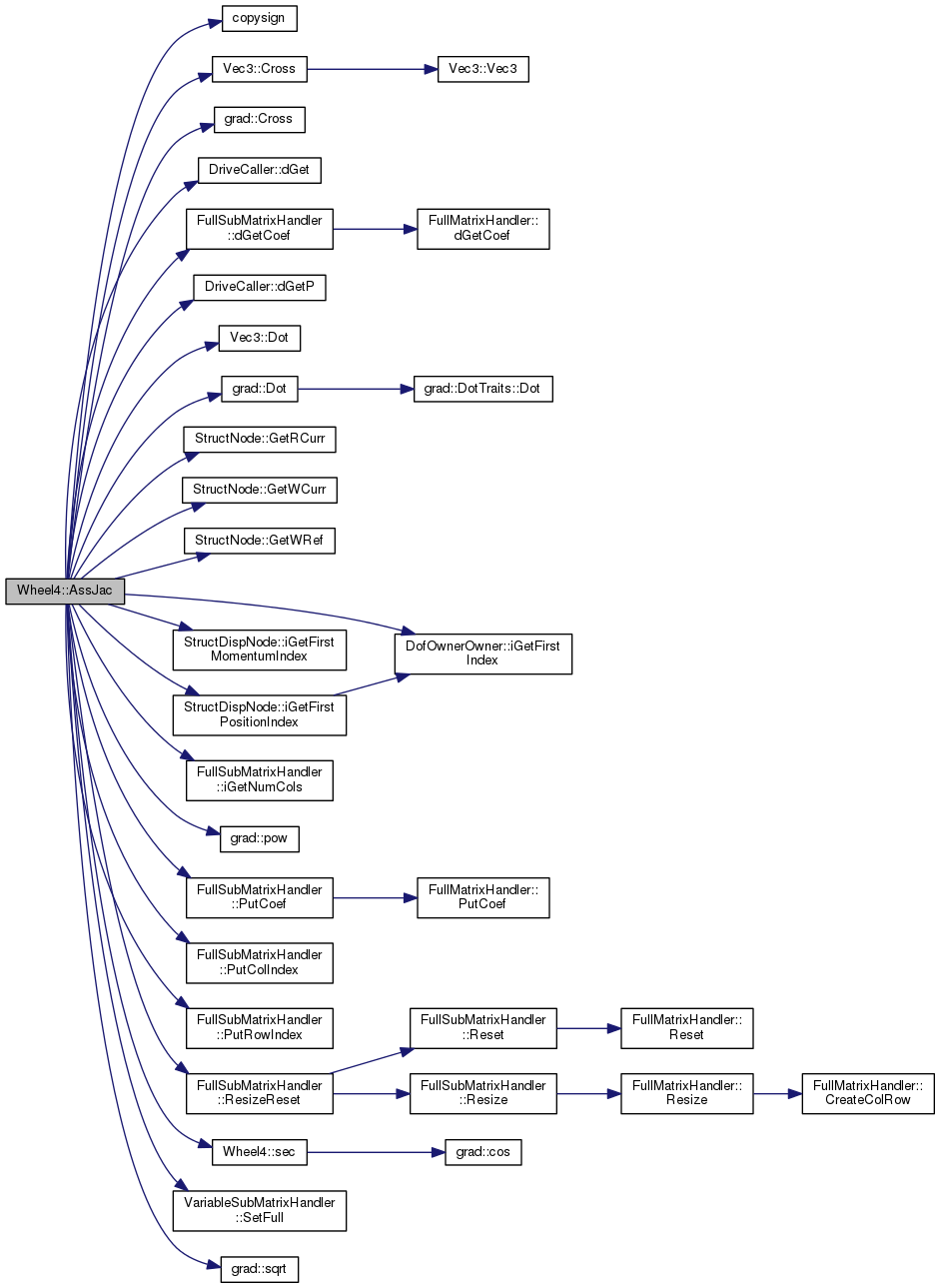
| VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
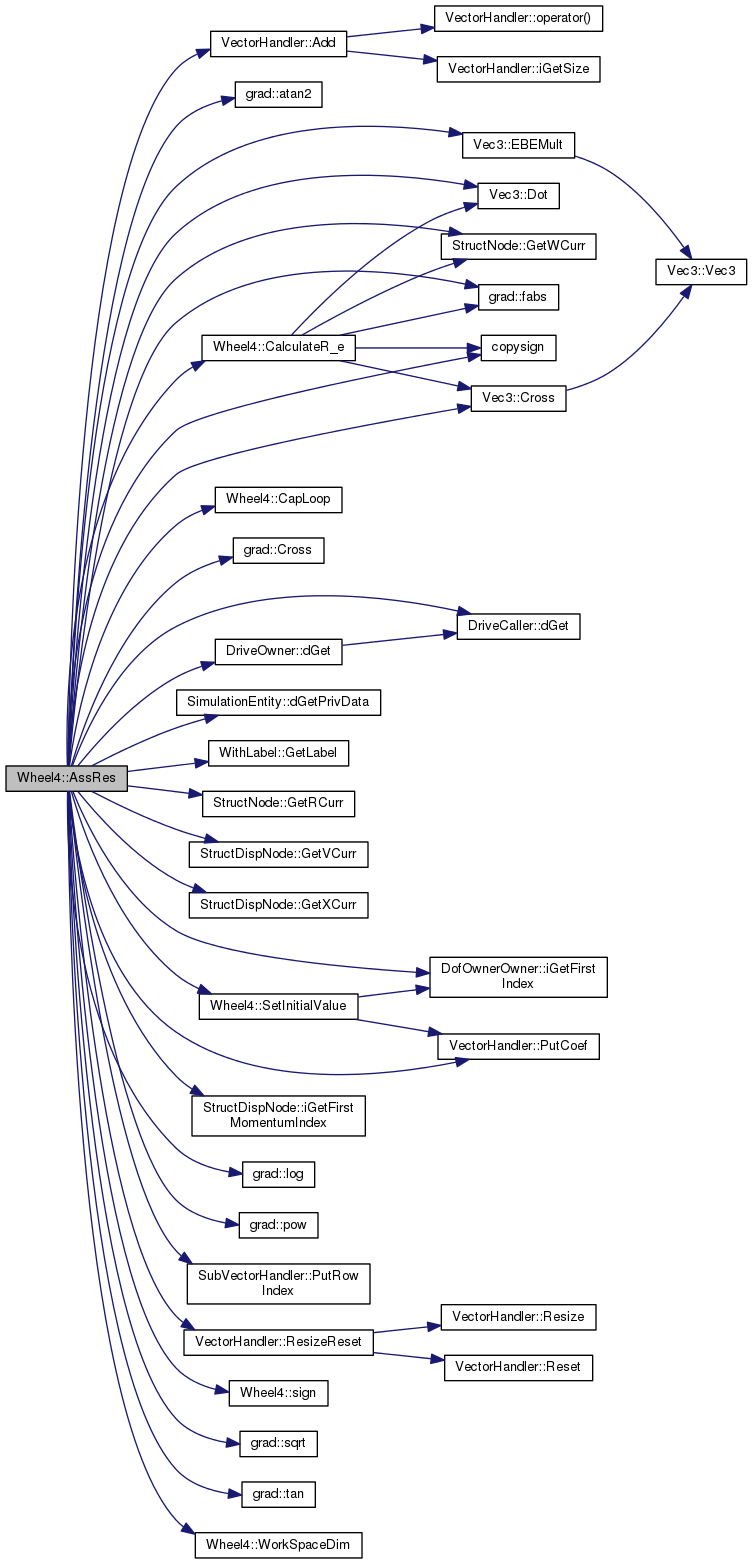
| SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| unsigned int | iGetNumPrivData (void) const |
| unsigned int | iGetPrivDataIdx (const char *s) const |
| doublereal | dGetPrivData (unsigned int i) const |
| int | iGetNumConnectedNodes (void) const |
| virtual void | SetInitialValue (VectorHandler &XCurr) |
| void | GetConnectedNodes (std::vector< const Node * > &connectedNodes) const |
| void | SetValue (DataManager *pDM, VectorHandler &X, VectorHandler &XP, SimulationEntity::Hints *ph) |
| virtual unsigned int | iGetNumDof (void) const |
| virtual DofOrder::Order | GetDofType (unsigned int i) const |
| virtual DofOrder::Order | GetEqType (unsigned int i) const |
| std::ostream & | Restart (std::ostream &out) const |
| virtual unsigned int | iGetInitialNumDof (void) const |
| virtual void | InitialWorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| VariableSubMatrixHandler & | InitialAssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| SubVectorHandler & | InitialAssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr) |
| void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP) |
| void | AfterPredict (VectorHandler &X, VectorHandler &XP) |
| void | CalculateR_e () |
| doublereal | CapLoop (doublereal Xuncapped) const |
 Public Member Functions inherited from Elem Public Member Functions inherited from Elem | |
| Elem (unsigned int uL, flag fOut) | |
| virtual | ~Elem (void) |
| virtual std::ostream & | DescribeDof (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeDof (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual std::ostream & | DescribeEq (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeEq (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual void | AssMats (VariableSubMatrixHandler &WorkMatA, VariableSubMatrixHandler &WorkMatB, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual bool | bInverseDynamics (void) const |
| void | SetInverseDynamicsFlags (unsigned uIDF) |
| unsigned | GetInverseDynamicsFlags (void) const |
| bool | bIsErgonomy (void) const |
| bool | bIsRightHandSide (void) const |
| virtual VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| virtual SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr, const VectorHandler &XPrimePrimeCurr, InverseDynamics::Order iOrder=InverseDynamics::INVERSE_DYNAMICS) |
| virtual int | GetNumConnectedNodes (void) const |
| Public Member Functions inherited from WithLabel | |
| WithLabel (unsigned int uL=0, const std::string &sN="") | |
| virtual | ~WithLabel (void) |
| void | PutLabel (unsigned int uL) |
| void | PutName (const std::string &sN) |
| unsigned int | GetLabel (void) const |
| const std::string & | GetName (void) const |
| Public Member Functions inherited from SimulationEntity | |
| SimulationEntity (void) | |
| virtual | ~SimulationEntity (void) |
| virtual bool | bIsValidIndex (unsigned int i) const |
| virtual Hint * | ParseHint (DataManager *pDM, const char *s) const |
| virtual void | BeforePredict (VectorHandler &, VectorHandler &, VectorHandler &, VectorHandler &) const |
| virtual void | Update (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | DerivativesUpdate (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | Update (const VectorHandler &XCurr, InverseDynamics::Order iOrder) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP, const VectorHandler &XPP) |
| virtual std::ostream & | OutputAppend (std::ostream &out) const |
| virtual void | ReadInitialState (MBDynParser &HP) |
| Public Member Functions inherited from ToBeOutput | |
| ToBeOutput (flag fOut=fDefaultOut) | |
| virtual | ~ToBeOutput (void) |
| virtual void | Output (OutputHandler &OH, const VectorHandler &X, const VectorHandler &XP) const |
| virtual flag | fToBeOutput (void) const |
| virtual bool | bToBeOutput (void) const |
| virtual void | SetOutputFlag (flag f=flag(1)) |
| Public Member Functions inherited from UserDefinedElem | |
| UserDefinedElem (unsigned uLabel, const DofOwner *pDO) | |
| virtual | ~UserDefinedElem (void) |
| bool | NeedsAirProperties (void) const |
| void | NeedsAirProperties (bool yesno) |
| virtual Elem::Type | GetElemType (void) const |
| virtual AerodynamicElem::Type | GetAerodynamicElemType (void) const |
| Public Member Functions inherited from InitialAssemblyElem | |
| InitialAssemblyElem (unsigned int uL, flag fOut) | |
| virtual | ~InitialAssemblyElem (void) |
| Public Member Functions inherited from SubjectToInitialAssembly | |
| SubjectToInitialAssembly (void) | |
| virtual | ~SubjectToInitialAssembly (void) |
| Public Member Functions inherited from AerodynamicElem | |
| AerodynamicElem (unsigned int uL, const DofOwner *pDO, flag fOut) | |
| virtual | ~AerodynamicElem (void) |
| virtual const InducedVelocity * | pGetInducedVelocity (void) const |
| Public Member Functions inherited from ElemWithDofs | |
| ElemWithDofs (unsigned int uL, const DofOwner *pDO, flag fOut) | |
| virtual | ~ElemWithDofs (void) |
| Public Member Functions inherited from DofOwnerOwner | |
| DofOwnerOwner (const DofOwner *pDO) | |
| virtual | ~DofOwnerOwner () |
| virtual const DofOwner * | pGetDofOwner (void) const |
| virtual integer | iGetFirstIndex (void) const |
| Public Member Functions inherited from AirPropOwner | |
| AirPropOwner (void) | |
| virtual | ~AirPropOwner (void) |
| virtual void | PutAirProperties (const AirProperties *pAP) |
| virtual flag | fGetAirVelocity (Vec3 &Velocity, const Vec3 &X) const |
| virtual doublereal | dGetAirDensity (const Vec3 &X) const |
| virtual doublereal | dGetAirPressure (const Vec3 &X) const |
| virtual doublereal | dGetAirTemperature (const Vec3 &X) const |
| virtual doublereal | dGetSoundSpeed (const Vec3 &X) const |
| virtual bool | GetAirProps (const Vec3 &X, doublereal &rho, doublereal &c, doublereal &p, doublereal &T) const |
| Public Member Functions inherited from ElemGravityOwner | |
| ElemGravityOwner (unsigned int uL, flag fOut) | |
| virtual | ~ElemGravityOwner (void) |
| virtual doublereal | dGetM (void) const |
| Vec3 | GetS (void) const |
| Mat3x3 | GetJ (void) const |
| Vec3 | GetB (void) const |
| Vec3 | GetG (void) const |
| Public Member Functions inherited from GravityOwner | |
| GravityOwner (void) | |
| virtual | ~GravityOwner (void) |
| void | PutGravity (const Gravity *pG) |
| virtual bool | bGetGravity (const Vec3 &X, Vec3 &Acc) const |
Private Member Functions | |
| doublereal | sec (doublereal x) const |
| int | sign (const doublereal x) |
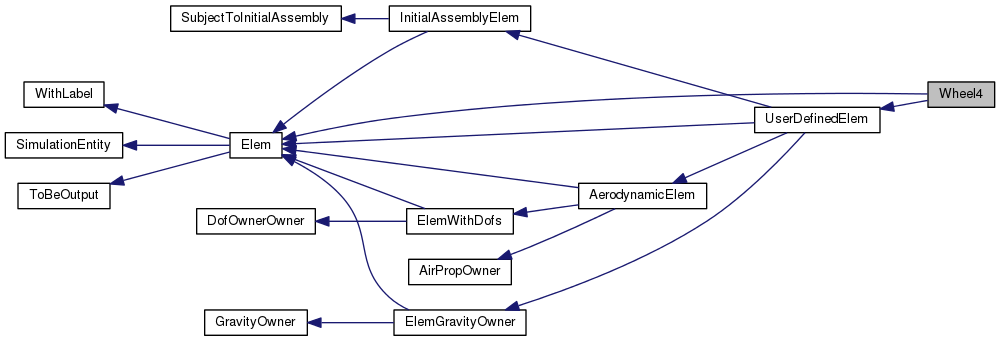
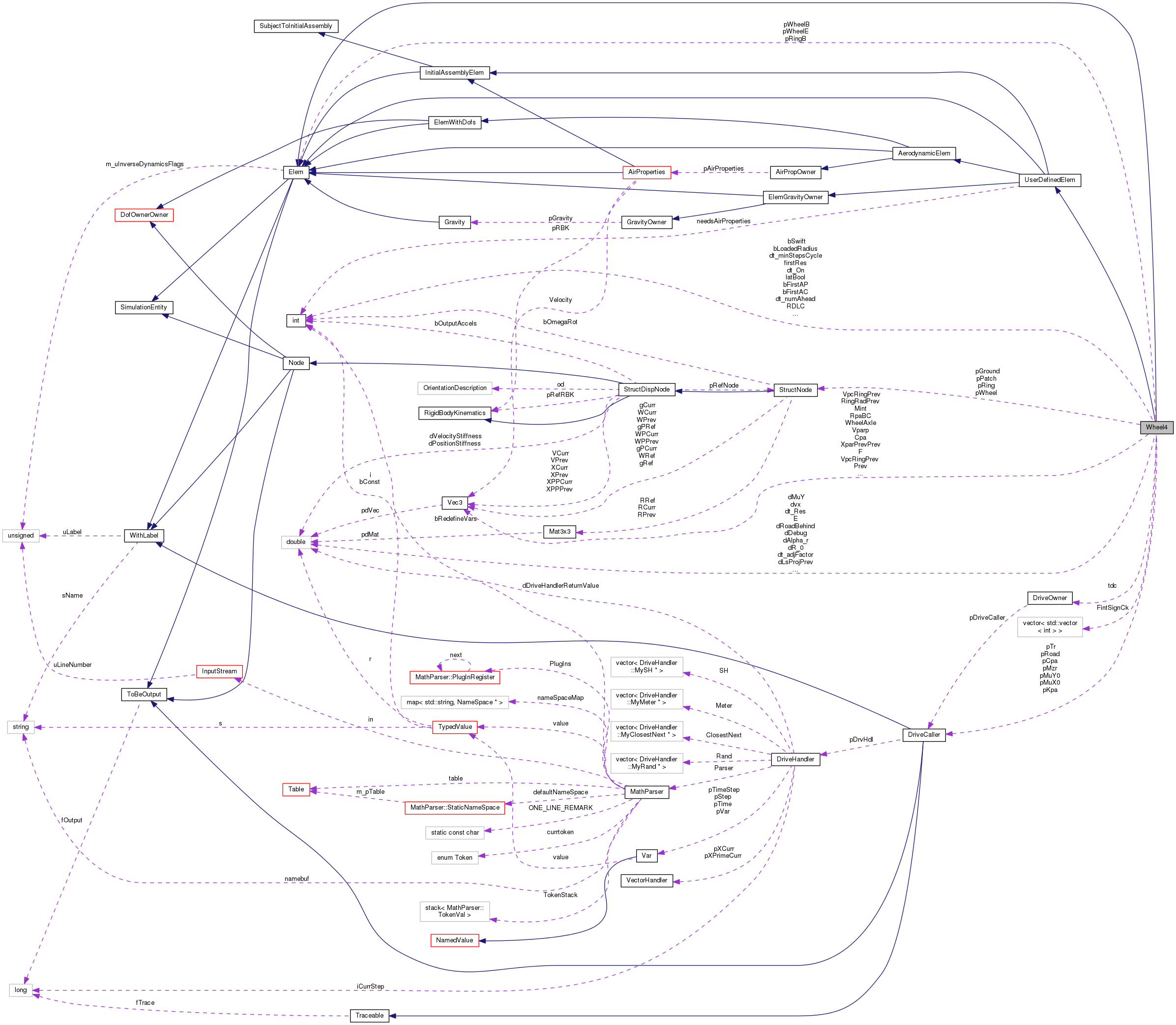
Definition at line 46 of file module-wheel4.h.
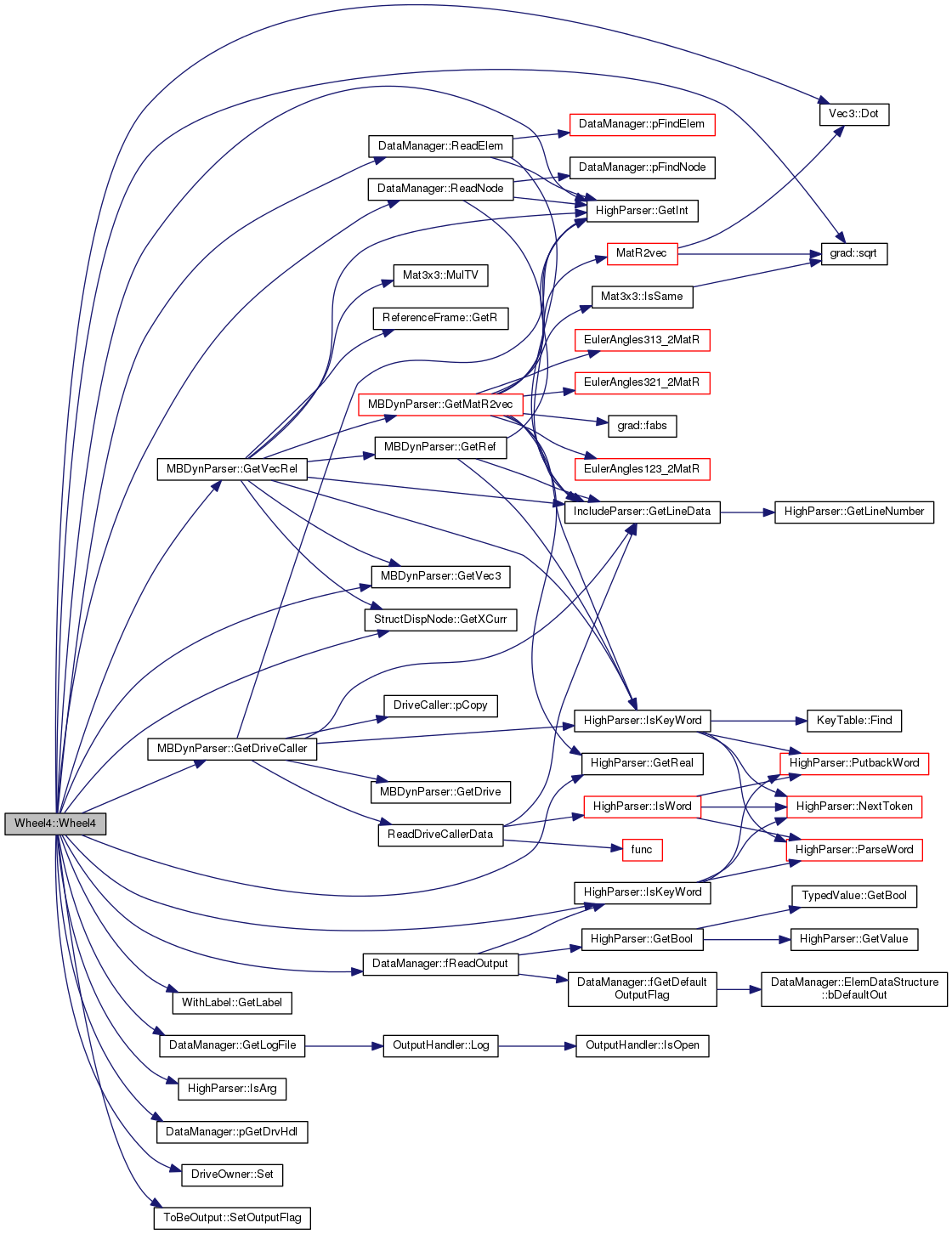
| Wheel4::Wheel4 | ( | unsigned | uLabel, |
| const DofOwner * | pDO, | ||
| DataManager * | pDM, | ||
| MBDynParser & | HP | ||
| ) |
Definition at line 51 of file module-wheel4.cc.
References bFirstAC, bFirstAP, bLoadedRadius, Elem::BODY, bSlip, bSwift, Cpa, curTime, deltaPrev, Vec3::Dot(), dPls, dR_0, dR_a1, dR_a2, dRoad, dRoadInitial, dt, dt_divF, dt_divF3, dt_divF4, dt_maxF, dt_maxH, dt_maxstep, dt_minF, dt_minstep, dt_minStepsCycle, dt_On, dt_Res, dvao, dXxPrev, FintPrev, FintPrevPrev, FintSignCk, DataManager::fReadOutput(), MBDynParser::GetDriveCaller(), HighParser::GetInt(), WithLabel::GetLabel(), DataManager::GetLogFile(), HighParser::GetReal(), MBDynParser::GetVec3(), MBDynParser::GetVecRel(), StructDispNode::GetXCurr(), i, HighParser::IsArg(), HighParser::IsKeyWord(), j, k, Kpa, Krz, Elem::LOADABLE, MBDYN_EXCEPT_ARGS, Mpa, nPrev, pCpa, DataManager::pGetDrvHdl(), pKpa, pMuX0, pMuY0, pMzr, pRing, pRingB, pRoad, pTr, pWheel, pWheelB, q_sy1, q_sy3, RDA, RDB, RDL, DataManager::ReadElem(), DataManager::ReadNode(), rRatio, S_hf, S_ht, DriveOwner::Set(), ToBeOutput::SetOutputFlag(), grad::sqrt(), Node::STRUCTURAL, tdc, TdLs, TdR_e, TdReDiv, TRH, TRHA, TRHC, TRHT, TRHTA, Vpa, VpaBC, VpaPrev, WheelAxle, Xpa, XpaBC, XpaPrev, XparpPrev, XparpPrevPrev, XparPrev, XparPrevPrev, and zZero.
|
virtual |
Definition at line 246 of file module-wheel4.cc.
References NO_OP.
|
virtual |
Reimplemented from SimulationEntity.
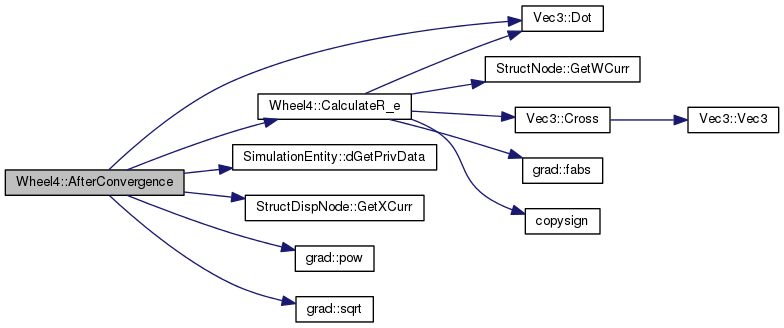
Definition at line 1697 of file module-wheel4.cc.
References bFirstAC, CalculateR_e(), dAlpha, dEffRad, SimulationEntity::dGetPrivData(), distM, Vec3::Dot(), dSa, E, EffRad, StructDispNode::GetXCurr(), KE, M_PI, Mpa, PE, grad::pow(), pRingB, pWheel, pWheelB, grad::sqrt(), Vpa, and Xring.
|
virtual |
Reimplemented from SimulationEntity.
Definition at line 1755 of file module-wheel4.cc.
References bFirstAP.
|
virtual |
Implements Elem.
Definition at line 692 of file module-wheel4.cc.
References boolFn, copysign(), Cpatv, Vec3::Cross(), grad::Cross(), dAlpha, dAlpha_r, dAlpha_t, derivSign, DriveCaller::dGet(), FullSubMatrixHandler::dGetCoef(), DriveCaller::dGetP(), distM, dMuX, dMuY, Vec3::Dot(), grad::Dot(), dR_0, dSr, dvax, Fint_old, Fint_ring, Fn, fwd, fwdBool, fwdRing, fwdRingFlat, StructNode::GetRCurr(), StructNode::GetWCurr(), StructNode::GetWRef(), i, DofOwnerOwner::iGetFirstIndex(), StructDispNode::iGetFirstMomentumIndex(), StructDispNode::iGetFirstPositionIndex(), FullSubMatrixHandler::iGetNumCols(), j, k, Kpatv, lat, latBool, latRing, latRingFlat, Mpa, n, pMuX0, pMuY0, pMzr, grad::pow(), pRing, pTr, FullSubMatrixHandler::PutCoef(), FullSubMatrixHandler::PutColIndex(), FullSubMatrixHandler::PutRowIndex(), pWheel, FullSubMatrixHandler::ResizeReset(), sec(), VariableSubMatrixHandler::SetFull(), grad::sqrt(), tr, TRH, va, Vpar, WheelAxle, and Xpar.
|
virtual |
Implements Elem.
Definition at line 1170 of file module-wheel4.cc.
References VectorHandler::Add(), grad::atan2(), bFirstAC, bFirstAP, bLoadedRadius, boolFn, CalculateR_e(), CapLoop(), copysign(), Cpa, Cpatv, Vec3::Cross(), grad::Cross(), curTime, dAlpha, dAlpha_r, dAlpha_t, dCpa, dCt, dDebug, ddistM, dEffRad, deltaPrev, DriveOwner::dGet(), DriveCaller::dGet(), SimulationEntity::dGetPrivData(), distM, dKpa, dLs, dLsProj, dLsProjPrev, dMuX, dMuY, dn, Vec3::Dot(), dPls, dR_0, dR_a1, dR_a2, dRoad, dRoadAhead, dRoadBehind, dRoadInitial, dRoadPrev, dRoadPrevPrev, dSr, dt, dt_adjFactor, dt_divF, dt_divF3, dt_divF4, dt_fNow, dt_maxF, dt_maxH, dt_maxstep, dt_minF, dt_minstep, dt_minStepsCycle, dt_numAhead, dt_On, dt_Res, dtMax, dvao, dvax, dvay, dVPx, dVPy, dVx, dvx, dVy, dXPx, dXPy, dXx, dXxPrev, dXxProj, dXxProjPrev, dXy, Vec3::EBEMult(), F, grad::fabs(), Fcent, Fint, Fint_old, Fint_ring, FintPrev, FintPrevPrev, FintSignCk, firstRes, Fn, Fpatch, Fr, fwd, fwdRing, fwdRingFlat, fwdRingPrev, WithLabel::GetLabel(), StructNode::GetRCurr(), StructDispNode::GetVCurr(), StructNode::GetWCurr(), StructDispNode::GetXCurr(), i, DofOwnerOwner::iGetFirstIndex(), StructDispNode::iGetFirstMomentumIndex(), j, k, Kpa, Kpatv, Krz, lat, latRing, latRingFlat, grad::log(), M, M_zr, MBDYN_EXCEPT_ARGS, Mpa, Mz, n, nPrev, oldTime, pCpa, pcRing, pcRingPrev, pKpa, pMuX0, pMuY0, pMzr, grad::pow(), pRing, pRingB, pRoad, pTr, VectorHandler::PutCoef(), SubVectorHandler::PutRowIndex(), pWheel, q_sy1, q_sy3, R_e, RDA, RDB, RDL, VectorHandler::ResizeReset(), RingRad, RingRadPrev, rRatio, S_hf, S_ht, SetInitialValue(), sign(), grad::sqrt(), grad::tan(), tdc, TdLs, tr, TRH, TRHA, TRHC, va, Vpa, VpaPrev, Vpar, Vparp, VparWheel, VpcRing, VpcRingPrev, VpcRingPrevPrev, WheelAxle, WorkSpaceDim(), Xpa, XpaPrev, XpaPrevPrev, Xpar, Xparp, XparpPrev, XparpPrevPrev, XparPrev, XparPrevPrev, and Xring.
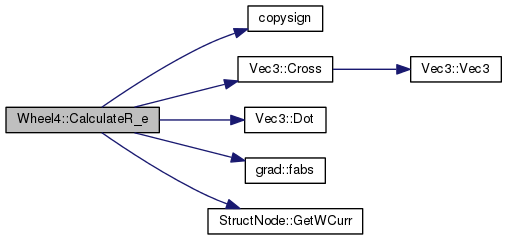
| void Wheel4::CalculateR_e | ( | ) |
Definition at line 1722 of file module-wheel4.cc.
References copysign(), Vec3::Cross(), Vec3::Dot(), dR_0, dvx, grad::fabs(), fwd, StructNode::GetWCurr(), lat, pWheel, R_e, TdR_e, and TdReDiv.
Referenced by AfterConvergence(), and AssRes().
| doublereal Wheel4::CapLoop | ( | doublereal | Xuncapped | ) | const |
|
virtual |
Reimplemented from SimulationEntity.
Definition at line 1777 of file module-wheel4.cc.
References ASSERT, dtMax, and iGetNumPrivData().

|
virtual |
|
virtual |
Reimplemented from Elem.
Definition at line 1821 of file module-wheel4.cc.
References DofOrder::DIFFERENTIAL.
|
virtual |
Reimplemented from SimulationEntity.
Definition at line 1827 of file module-wheel4.cc.
References DofOrder::DIFFERENTIAL.
|
virtual |
Implements SubjectToInitialAssembly.
Definition at line 1833 of file module-wheel4.cc.
| int Wheel4::iGetNumConnectedNodes | ( | void | ) | const |
Definition at line 1785 of file module-wheel4.cc.
|
virtual |
Reimplemented from Elem.
Definition at line 1816 of file module-wheel4.cc.
|
virtual |
Reimplemented from SimulationEntity.
Definition at line 1762 of file module-wheel4.cc.
Referenced by dGetPrivData().
|
virtual |
Reimplemented from SimulationEntity.
Definition at line 1768 of file module-wheel4.cc.
References ASSERT.
|
virtual |
Implements SubjectToInitialAssembly.
Definition at line 1846 of file module-wheel4.cc.
References ASSERT, and VariableSubMatrixHandler::SetNullMatrix().

|
virtual |
Implements SubjectToInitialAssembly.
Definition at line 1857 of file module-wheel4.cc.
References ASSERT, and VectorHandler::Resize().

Implements SubjectToInitialAssembly.
Definition at line 1839 of file module-wheel4.cc.
|
virtual |
Reimplemented from ToBeOutput.
Definition at line 582 of file module-wheel4.cc.
References ToBeOutput::bToBeOutput(), dAlpha, dCt, dDebug, ddistM, distM, dLs, dMuX, dMuY, dRoad, dRoadAhead, dRoadBehind, dRoadPrev, dSa, dSr, dt, dvax, dvay, dvx, dXxProj, E, F, Fcent, Fint, Fint_ring, Fn, Fr, fwd, fwdRing, fwdRingFlat, OutputHandler::GetCurrentStep(), WithLabel::GetLabel(), KE, OutputHandler::LOADABLE, OutputHandler::Loadable(), M, M_PI, Mz, n, pcRing, PE, Vec3::pGetVec(), R_e, OutputHandler::UseNetCDF(), OutputHandler::UseText(), Vpa, Vpar, VparWheel, Xpa, Xpar, and Xparp.
|
virtual |
Reimplemented from ToBeOutput.
Definition at line 252 of file module-wheel4.cc.
References ASSERT, ToBeOutput::bToBeOutput(), buf, WithLabel::GetLabel(), OutputHandler::IsOpen(), OutputHandler::LOADABLE, MBDYN_EXCEPT_ARGS, OutputHandler::NETCDF, STRLENOF, and OutputHandler::UseNetCDF().
|
virtual |
Implements Elem.
Definition at line 1810 of file module-wheel4.cc.
|
inlineprivate |
Definition at line 264 of file module-wheel4.h.
References grad::cos().
Referenced by AssJac().

|
virtual |
Initialize state vector used in initial assembly. May set internal states of the element. Do not rely on being always called, because initial assembly could be implicitly or explicitly skipped
Reimplemented from DofOwnerOwner.
Definition at line 1744 of file module-wheel4.cc.
References DofOwnerOwner::iGetFirstIndex(), VectorHandler::PutCoef(), and XpaPrev.
Referenced by AssRes().
|
virtual |
Reimplemented from SimulationEntity.
Definition at line 1802 of file module-wheel4.cc.
References NO_OP.
|
inlineprivate |
Definition at line 268 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 157 of file module-wheel4.h.
Referenced by AfterConvergence(), AssRes(), and Wheel4().
|
private |
Definition at line 158 of file module-wheel4.h.
Referenced by AfterPredict(), AssRes(), and Wheel4().
|
private |
Definition at line 79 of file module-wheel4.h.
|
private |
Definition at line 186 of file module-wheel4.h.
|
private |
Definition at line 78 of file module-wheel4.h.
Referenced by Wheel4().
|
private |
Definition at line 154 of file module-wheel4.h.
Referenced by Wheel4().
|
private |
Definition at line 134 of file module-wheel4.h.
|
private |
Definition at line 96 of file module-wheel4.h.
|
private |
Definition at line 155 of file module-wheel4.h.
|
private |
Definition at line 249 of file module-wheel4.h.
Referenced by AfterConvergence(), AssJac(), AssRes(), and Output().
|
private |
Definition at line 251 of file module-wheel4.h.
|
private |
Definition at line 250 of file module-wheel4.h.
|
private |
Definition at line 95 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 184 of file module-wheel4.h.
|
private |
Definition at line 260 of file module-wheel4.h.
|
private |
Definition at line 125 of file module-wheel4.h.
|
private |
Definition at line 126 of file module-wheel4.h.
Referenced by AfterConvergence(), and AssRes().
|
private |
Definition at line 246 of file module-wheel4.h.
|
private |
Definition at line 235 of file module-wheel4.h.
Referenced by AssJac().
|
private |
Definition at line 124 of file module-wheel4.h.
Referenced by AfterConvergence(), AssJac(), AssRes(), and Output().
|
private |
Definition at line 92 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 190 of file module-wheel4.h.
|
private |
Definition at line 194 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 197 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 200 of file module-wheel4.h.
|
private |
Definition at line 252 of file module-wheel4.h.
|
private |
Definition at line 253 of file module-wheel4.h.
|
private |
Definition at line 220 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 191 of file module-wheel4.h.
|
private |
Definition at line 245 of file module-wheel4.h.
Referenced by AssJac(), AssRes(), CalculateR_e(), and Wheel4().
|
private |
Definition at line 192 of file module-wheel4.h.
|
private |
Definition at line 193 of file module-wheel4.h.
|
private |
Definition at line 100 of file module-wheel4.h.
|
private |
Definition at line 101 of file module-wheel4.h.
|
private |
Definition at line 102 of file module-wheel4.h.
|
private |
Definition at line 103 of file module-wheel4.h.
|
private |
Definition at line 104 of file module-wheel4.h.
|
private |
Definition at line 105 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 179 of file module-wheel4.h.
|
private |
Definition at line 248 of file module-wheel4.h.
Referenced by AfterConvergence(), and Output().
|
private |
Definition at line 247 of file module-wheel4.h.
|
private |
Definition at line 153 of file module-wheel4.h.
|
private |
Definition at line 203 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 212 of file module-wheel4.h.
|
private |
Definition at line 213 of file module-wheel4.h.
|
private |
Definition at line 214 of file module-wheel4.h.
|
private |
Definition at line 204 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 198 of file module-wheel4.h.
|
private |
Definition at line 202 of file module-wheel4.h.
|
private |
Definition at line 205 of file module-wheel4.h.
|
private |
Definition at line 199 of file module-wheel4.h.
|
private |
Definition at line 206 of file module-wheel4.h.
|
private |
Definition at line 211 of file module-wheel4.h.
|
private |
Definition at line 210 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 207 of file module-wheel4.h.
|
private |
Definition at line 208 of file module-wheel4.h.
|
private |
Definition at line 209 of file module-wheel4.h.
Referenced by AssRes(), and dGetPrivData().
|
private |
Definition at line 201 of file module-wheel4.h.
|
private |
Definition at line 256 of file module-wheel4.h.
|
private |
Definition at line 222 of file module-wheel4.h.
|
private |
Definition at line 223 of file module-wheel4.h.
|
private |
Definition at line 52 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 52 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 52 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 221 of file module-wheel4.h.
Referenced by AssRes(), CalculateR_e(), and Output().
|
private |
Definition at line 52 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 52 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 52 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 52 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 225 of file module-wheel4.h.
|
private |
Definition at line 195 of file module-wheel4.h.
|
private |
Definition at line 196 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 52 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 226 of file module-wheel4.h.
Referenced by AfterConvergence(), and Output().
|
private |
Definition at line 127 of file module-wheel4.h.
Referenced by AfterConvergence().
|
private |
Definition at line 242 of file module-wheel4.h.
|
private |
Definition at line 183 of file module-wheel4.h.
|
private |
Definition at line 143 of file module-wheel4.h.
|
private |
Definition at line 144 of file module-wheel4.h.
|
private |
Definition at line 145 of file module-wheel4.h.
|
private |
Definition at line 216 of file module-wheel4.h.
|
private |
Definition at line 217 of file module-wheel4.h.
|
private |
Definition at line 215 of file module-wheel4.h.
|
private |
Definition at line 258 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 182 of file module-wheel4.h.
|
private |
Definition at line 146 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 185 of file module-wheel4.h.
|
private |
Definition at line 170 of file module-wheel4.h.
Referenced by AssJac(), AssRes(), CalculateR_e(), and Output().
|
private |
Definition at line 237 of file module-wheel4.h.
Referenced by AssJac().
|
private |
Definition at line 171 of file module-wheel4.h.
|
private |
Definition at line 172 of file module-wheel4.h.
|
private |
Definition at line 178 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 187 of file module-wheel4.h.
|
private |
Definition at line 188 of file module-wheel4.h.
|
private |
Definition at line 189 of file module-wheel4.h.
|
private |
Definition at line 227 of file module-wheel4.h.
Referenced by AfterConvergence(), and Output().
|
private |
Definition at line 133 of file module-wheel4.h.
|
private |
Definition at line 93 of file module-wheel4.h.
|
private |
Definition at line 88 of file module-wheel4.h.
|
private |
Definition at line 173 of file module-wheel4.h.
Referenced by AssJac(), AssRes(), and CalculateR_e().
|
private |
Definition at line 236 of file module-wheel4.h.
Referenced by AssJac().
|
private |
Definition at line 174 of file module-wheel4.h.
|
private |
Definition at line 175 of file module-wheel4.h.
|
private |
Definition at line 243 of file module-wheel4.h.
|
private |
Definition at line 152 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 147 of file module-wheel4.h.
|
private |
Definition at line 148 of file module-wheel4.h.
Referenced by AfterConvergence(), AssJac(), AssRes(), and Wheel4().
|
private |
Definition at line 244 of file module-wheel4.h.
|
private |
Definition at line 176 of file module-wheel4.h.
|
private |
Definition at line 177 of file module-wheel4.h.
|
private |
Definition at line 156 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 94 of file module-wheel4.h.
|
private |
Definition at line 161 of file module-wheel4.h.
|
private |
Definition at line 162 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 228 of file module-wheel4.h.
Referenced by AfterConvergence(), and Output().
|
private |
Definition at line 73 of file module-wheel4.h.
|
private |
Definition at line 91 of file module-wheel4.h.
|
private |
Definition at line 80 of file module-wheel4.h.
|
private |
Definition at line 81 of file module-wheel4.h.
|
private |
Definition at line 83 of file module-wheel4.h.
|
private |
Definition at line 66 of file module-wheel4.h.
|
private |
Definition at line 62 of file module-wheel4.h.
Referenced by AssJac(), AssRes(), GetConnectedNodes(), and Wheel4().
|
private |
Definition at line 63 of file module-wheel4.h.
Referenced by AfterConvergence(), AssRes(), and Wheel4().
|
private |
Definition at line 99 of file module-wheel4.h.
|
private |
Definition at line 82 of file module-wheel4.h.
|
private |
Definition at line 57 of file module-wheel4.h.
Referenced by AfterConvergence(), AssJac(), AssRes(), CalculateR_e(), GetConnectedNodes(), and Wheel4().
|
private |
Definition at line 58 of file module-wheel4.h.
Referenced by AfterConvergence(), and Wheel4().
|
private |
Definition at line 59 of file module-wheel4.h.
|
private |
Definition at line 254 of file module-wheel4.h.
|
private |
Definition at line 255 of file module-wheel4.h.
|
private |
Definition at line 128 of file module-wheel4.h.
Referenced by AssRes(), CalculateR_e(), and Output().
|
private |
Definition at line 116 of file module-wheel4.h.
|
private |
Definition at line 117 of file module-wheel4.h.
|
private |
Definition at line 118 of file module-wheel4.h.
|
private |
Definition at line 119 of file module-wheel4.h.
|
private |
Definition at line 163 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 164 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 137 of file module-wheel4.h.
|
private |
Definition at line 87 of file module-wheel4.h.
|
private |
Definition at line 151 of file module-wheel4.h.
|
private |
Definition at line 150 of file module-wheel4.h.
|
private |
Definition at line 159 of file module-wheel4.h.
|
private |
Definition at line 113 of file module-wheel4.h.
|
private |
Definition at line 115 of file module-wheel4.h.
Referenced by CalculateR_e(), and Wheel4().
|
private |
Definition at line 114 of file module-wheel4.h.
Referenced by CalculateR_e(), and Wheel4().
|
private |
Definition at line 149 of file module-wheel4.h.
|
private |
Definition at line 108 of file module-wheel4.h.
|
private |
Definition at line 109 of file module-wheel4.h.
|
private |
Definition at line 112 of file module-wheel4.h.
|
private |
Definition at line 110 of file module-wheel4.h.
Referenced by Wheel4().
|
private |
Definition at line 111 of file module-wheel4.h.
Referenced by Wheel4().
|
private |
Definition at line 224 of file module-wheel4.h.
|
private |
Definition at line 139 of file module-wheel4.h.
Referenced by AfterConvergence(), AssRes(), Output(), and Wheel4().
|
private |
Definition at line 136 of file module-wheel4.h.
Referenced by Wheel4().
|
private |
Definition at line 142 of file module-wheel4.h.
|
private |
Definition at line 140 of file module-wheel4.h.
|
private |
Definition at line 181 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 141 of file module-wheel4.h.
|
private |
Definition at line 166 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 165 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 167 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 169 of file module-wheel4.h.
|
private |
Definition at line 70 of file module-wheel4.h.
|
private |
Definition at line 138 of file module-wheel4.h.
|
private |
Definition at line 122 of file module-wheel4.h.
|
private |
Definition at line 135 of file module-wheel4.h.
Referenced by Wheel4().
|
private |
Definition at line 130 of file module-wheel4.h.
Referenced by AssRes(), SetInitialValue(), and Wheel4().
|
private |
Definition at line 132 of file module-wheel4.h.
Referenced by AssRes().
|
private |
Definition at line 123 of file module-wheel4.h.
|
private |
Definition at line 180 of file module-wheel4.h.
|
private |
Definition at line 218 of file module-wheel4.h.
|
private |
Definition at line 219 of file module-wheel4.h.
|
private |
Definition at line 129 of file module-wheel4.h.
|
private |
Definition at line 131 of file module-wheel4.h.
|
private |
Definition at line 168 of file module-wheel4.h.
Referenced by AfterConvergence(), and AssRes().
|
private |
Definition at line 160 of file module-wheel4.h.
Referenced by Wheel4().
 1.8.7
1.8.7 
