|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
#include <drive.h>
Public Member Functions | |
| DriveOwner (const DriveCaller *pDC=0) | |
| DriveOwner (const DriveOwner &drive) | |
| virtual | ~DriveOwner (void) |
| void | Set (const DriveCaller *pDC) |
| DriveCaller * | pGetDriveCaller (void) const |
| doublereal | dGet (const doublereal &dVar) const |
| doublereal | dGet (void) const |
| bool | bIsDifferentiable (void) const |
| doublereal | dGetP (const doublereal &dVar) const |
| doublereal | dGetP (void) const |
Protected Attributes | |
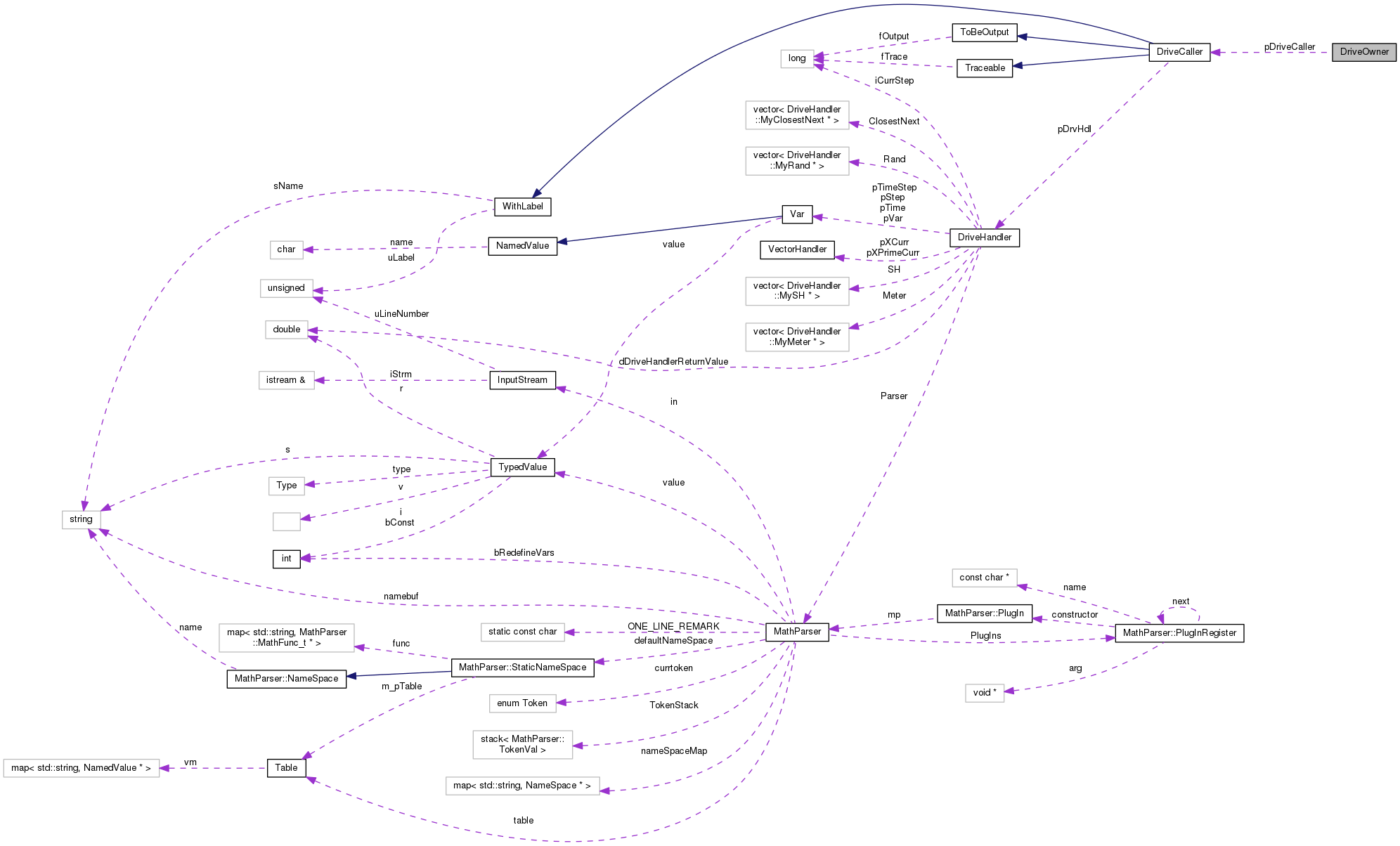
| DriveCaller * | pDriveCaller |
Private Member Functions | |
| void | operator= (const DriveOwner &) |
| DriveOwner::DriveOwner | ( | const DriveCaller * | pDC = 0 | ) |
| DriveOwner::DriveOwner | ( | const DriveOwner & | drive | ) |
|
virtual |
| bool DriveOwner::bIsDifferentiable | ( | void | ) | const |
Definition at line 677 of file drive.cc.
References DriveCaller::bIsDifferentiable(), and pDriveCaller.
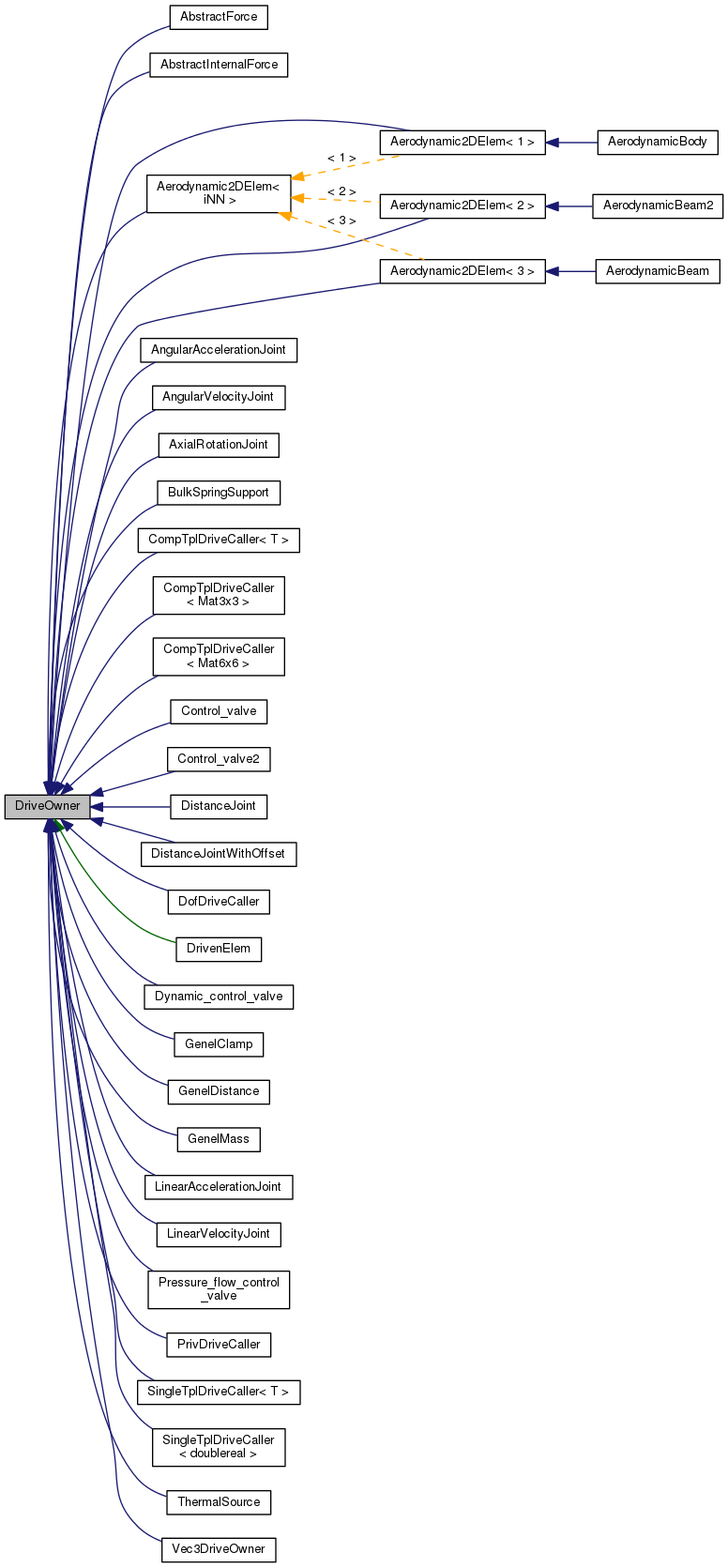
Referenced by DriveDriveCaller::bIsDifferentiable(), SingleTplDriveCaller< T >::bIsDifferentiable(), SingleTplDriveCaller< doublereal >::bIsDifferentiable(), and PostponedDriveCaller::bIsDifferentiable().

| doublereal DriveOwner::dGet | ( | const doublereal & | dVar | ) | const |
Definition at line 664 of file drive.cc.
References DriveCaller::dGet(), and pDriveCaller.
Referenced by ScalarPX::AddInput(), VectorPX::AddInput(), AeroDynModule::AeroDynModule(), LoadIncNorm::AfterConvergence(), Brake::AfterConvergence(), Rotor::AfterConvergence(), AeroDynModule::AfterConvergence(), CyclocopterUniform1D::AfterConvergence(), CyclocopterUniform2D::AfterConvergence(), CyclocopterPolimi::AfterConvergence(), VariableBody::AfterPredict(), AeroDynModule::AfterPredict(), HydrodynamicPlainBearing::AssJac(), LoadIncNorm::AssJac(), asynchronous_machine::AssJac(), Motor::AssJac(), RotorTrimBase::AssJac(), Brake::AssJac(), ModuleMDS::AssRes(), LoadIncNorm::AssRes(), asynchronous_machine::AssRes(), Motor::AssRes(), RotorTrimBase::AssRes(), Brake::AssRes(), DynamicVariableBody::AssRes(), AeroDynModule::AssRes(), StaticVariableBody::AssRes(), Wheel4::AssRes(), VariableBody::AssVecRBK_int(), asynchronous_machine::asynchronous_machine(), HydrodynamicPlainBearing::ComputeResidual(), PostponedDriveCaller::dGet(), BasicAirProperties::dGetAirDensity(), Solver::dGetInitialMaxTimeStep(), VariableBody::dGetM(), ChangeStep::dGetNewStepTime(), Factor::dGetNewStepTime(), DriveDriveCaller::dGetP(), asynchronous_machine::dGetPrivData(), Motor::dGetPrivData(), VariableBody::dGetPrivData(), DynamicVariableBody::GetB_int(), RotorTrimGeneric::GetData(), DynamicVariableBody::GetG_int(), VariableBody::GetJ_int(), FixedDirPosRel::GetPosRel(), VariableBody::GetS_int(), Gust1D::GetVelocity(), PowerLawWindProfile::GetVelocity(), LogarithmicWindProfile::GetVelocity(), GRAALLDamperConstitutiveLaw::GRAALLDamperConstitutiveLaw(), NoChange::Init(), ChangeStep::Init(), Factor::Init(), DynamicVariableBody::InitialAssRes(), asynchronous_machine::IsMotorOn(), LoadIncNorm::LoadIncNorm(), asynchronous_machine::Output(), Brake::Output(), SwitchDriveCaller::pGetDrive(), DAC_Process_Debug::PutOutput(), InverseSolver::ReadData(), Solver::ReadData(), asynchronous_machine::Restart(), SampleAndHold::SampleAndHold(), TunableThirdOrderIntegrator::SetCoef(), MultistepSolver::SetCoef(), HopeSolver::SetCoef(), SampleAndHold::SetValue(), DynamicVariableBody::SetValue(), SampleAndHold::Update(), MusclePennestriCL::Update(), MusclePennestriReflexiveCL::Update(), GRAALLDamperConstitutiveLaw::Update(), and LTVViscoElasticGenericConstitutiveLaw< T, Tder >::Update().

| doublereal DriveOwner::dGet | ( | void | ) | const |
Definition at line 671 of file drive.cc.
References DriveCaller::dGet(), and pDriveCaller.
Referenced by DrivenElem::AfterConvergence(), DrivenElem::AfterPredict(), BulkSpringSupport::AssJac(), DrivenElem::AssJac(), AerodynamicBody::AssJac(), AerodynamicBeam::AssJac(), GenelMass::AssJac(), AerodynamicBeam2::AssJac(), DrivenElem::AssMats(), LinearAccelerationJoint::AssRes(), GenelClamp::AssRes(), LinearVelocityJoint::AssRes(), DrivenElem::AssRes(), BulkSpringSupport::AssRes(), GenelDistance::AssRes(), AngularAccelerationJoint::AssRes(), AngularVelocityJoint::AssRes(), GenelMass::AssRes(), AerodynamicBody::AssVec(), AerodynamicBeam::AssVec(), AerodynamicBeam2::AssVec(), DrivenElem::BeforePredict(), DrivenElem::bIsActive(), DrivenElem::dGetM(), LinearAccelerationJoint::dGetPrivData(), DrivenElem::dGetPrivData(), LinearVelocityJoint::dGetPrivData(), DistanceJoint::dGetPrivData(), AngularAccelerationJoint::dGetPrivData(), AngularVelocityJoint::dGetPrivData(), DistanceJointWithOffset::dGetPrivData(), AxialRotationJoint::dGetPrivData(), SingleTplDriveCaller< T >::Get(), SingleTplDriveCaller< doublereal >::Get(), DrivenElem::GetB_int(), DrivenElem::GetG_int(), DrivenElem::GetJ(), DrivenElem::GetJ_int(), DrivenElem::GetS(), DrivenElem::GetS_int(), Vec3DriveOwner::GetVec(), DrivenElem::iGetInitialNumDof(), DrivenElem::InitialAssJac(), LinearVelocityJoint::InitialAssRes(), DrivenElem::InitialAssRes(), AngularVelocityJoint::InitialAssRes(), DrivenElem::InitialWorkSpaceDim(), DrivenElem::Output(), LinearAccelerationJoint::Output(), LinearVelocityJoint::Output(), DistanceJoint::Output(), AngularAccelerationJoint::Output(), AbstractForce::Output(), AngularVelocityJoint::Output(), DistanceJointWithOffset::Output(), AbstractInternalForce::Output(), AxialRotationJoint::Output(), DrivenElem::SetInitialValue(), DrivenElem::SetValue(), GenelClamp::SetValue(), GenelDistance::SetValue(), and DrivenElem::Update().

| doublereal DriveOwner::dGetP | ( | const doublereal & | dVar | ) | const |
Definition at line 683 of file drive.cc.
References DriveCaller::dGetP(), and pDriveCaller.
Referenced by Motor::AssJac(), DynamicVariableBody::AssRes(), DriveDriveCaller::dGetP(), and PostponedDriveCaller::dGetP().

| doublereal DriveOwner::dGetP | ( | void | ) | const |
Definition at line 690 of file drive.cc.
References DriveCaller::dGetP(), and pDriveCaller.
Referenced by SingleTplDriveCaller< T >::GetP(), and SingleTplDriveCaller< doublereal >::GetP().

|
inlineprivate |
| DriveCaller * DriveOwner::pGetDriveCaller | ( | void | ) | const |
Definition at line 658 of file drive.cc.
References pDriveCaller.
Referenced by Rotor::AfterConvergence(), DistanceJoint::AssJac(), DistanceJointWithOffset::AssJac(), ThermalSource::AssRes(), DistanceJoint::AssRes(), Control_valve::AssRes(), AbstractForce::AssRes(), DistanceJointWithOffset::AssRes(), AbstractInternalForce::AssRes(), Dynamic_control_valve::AssRes(), Pressure_flow_control_valve::AssRes(), AxialRotationJoint::AssRes(), MultDriveCaller::bIsDifferentiable(), PeriodicDriveCaller::bIsDifferentiable(), PostponedDriveCaller::Check(), DofDriveCaller::dGet(), DriveDriveCaller::dGet(), PrivDriveCaller::dGet(), MultDriveCaller::dGet(), PeriodicDriveCaller::dGet(), Solver::dGetInitialMaxTimeStep(), MultDriveCaller::dGetP(), PeriodicDriveCaller::dGetP(), NoChange::Init(), ChangeStep::Init(), Factor::Init(), DistanceJoint::InitialAssJac(), DistanceJointWithOffset::InitialAssJac(), DistanceJoint::InitialAssRes(), DistanceJointWithOffset::InitialAssRes(), AxialRotationJoint::InitialAssRes(), DofDriveCaller::pCopy(), DriveDriveCaller::pCopy(), PrivDriveCaller::pCopy(), MusclePennestriCL::pCopy(), SingleTplDriveCaller< T >::pCopy(), MusclePennestriErgoCL::pCopy(), SingleTplDriveCaller< doublereal >::pCopy(), MusclePennestriReflexiveCL::pCopy(), MultDriveCaller::pCopy(), LTVViscoElasticGenericConstitutiveLaw< T, Tder >::pCopy(), PeriodicDriveCaller::pCopy(), SwitchDriveCaller::pGetDrive(), Control_valve2::Prepare(), InverseSolver::ReadData(), Solver::ReadData(), Vec3DriveOwner::Restart(), DofDriveCaller::Restart(), DriveDriveCaller::Restart(), PrivDriveCaller::Restart(), DistanceJoint::Restart(), LinearVelocityJoint::Restart(), DrivenElem::Restart(), Gust1D::Restart(), VariableBody::Restart(), MusclePennestriCL::Restart(), PowerLawWindProfile::Restart(), BasicAirProperties::Restart(), HydrodynamicPlainBearing::Restart(), Motor::Restart(), asynchronous_machine::Restart(), SingleTplDriveCaller< T >::Restart(), LogarithmicWindProfile::Restart(), AbstractForce::Restart(), AngularVelocityJoint::Restart(), DistanceJointWithOffset::Restart(), SingleTplDriveCaller< doublereal >::Restart(), AbstractInternalForce::Restart(), MultDriveCaller::Restart(), AerodynamicBody::Restart(), UniformRotor::Restart(), AerodynamicBeam::Restart(), AxialRotationJoint::Restart(), GlauertRotor::Restart(), AerodynamicBeam2::Restart(), ManglerRotor::Restart(), LTVViscoElasticGenericConstitutiveLaw< T, Tder >::Restart(), PeriodicDriveCaller::Restart(), PostponedDriveCaller::Restart(), SingleTplDriveCaller< T >::Restart_int(), SingleTplDriveCaller< doublereal >::Restart_int(), MusclePennestriReflexiveCL::Restart_int(), TunableThirdOrderIntegrator::SetDriveHandler(), MultistepSolver::SetDriveHandler(), HopeSolver::SetDriveHandler(), DistanceJoint::SetInitialValue(), DistanceJointWithOffset::SetInitialValue(), DistanceJoint::SetValue(), and DistanceJointWithOffset::SetValue().
| void DriveOwner::Set | ( | const DriveCaller * | pDC | ) |
Definition at line 647 of file drive.cc.
References ASSERT, DEBUGCOUT, pDriveCaller, and SAFEDELETE.
Referenced by AeroDynModule::AeroDynModule(), asynchronous_machine::asynchronous_machine(), PostponedDriveCaller::Check(), CyclocopterPolimi::CyclocopterPolimi(), CyclocopterUniform1D::CyclocopterUniform1D(), CyclocopterUniform2D::CyclocopterUniform2D(), HydrodynamicPlainBearing::HydrodynamicPlainBearing(), ChangeStep::Init(), Factor::Init(), UniformRotor::Init(), GlauertRotor::Init(), ManglerRotor::Init(), LoadIncNorm::LoadIncNorm(), ModuleMDS::ModuleMDS(), InverseSolver::ReadData(), Solver::ReadData(), DistanceJoint::SetValue(), DistanceJointWithOffset::SetValue(), AxialRotationJoint::SetValue(), and Wheel4::Wheel4().
|
protected |
Definition at line 133 of file drive.h.
Referenced by bIsDifferentiable(), dGet(), dGetP(), pGetDriveCaller(), Set(), and ~DriveOwner().
 1.8.7
1.8.7 
