|
| | PinJoint (unsigned int uL, const DofOwner *pDO, const StructNode *pN, const Vec3 &X0Tmp, const Vec3 &dTmp, flag fOut) |
| |
| | ~PinJoint (void) |
| |
| virtual Joint::Type | GetJointType (void) const |
| |
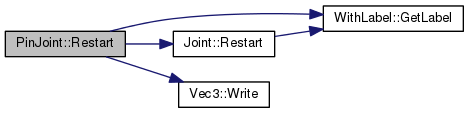
| virtual std::ostream & | Restart (std::ostream &out) const |
| |
| virtual unsigned int | iGetNumDof (void) const |
| |
| virtual DofOrder::Order | GetDofType (unsigned int i) const |
| |
| virtual void | WorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| |
| VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| |
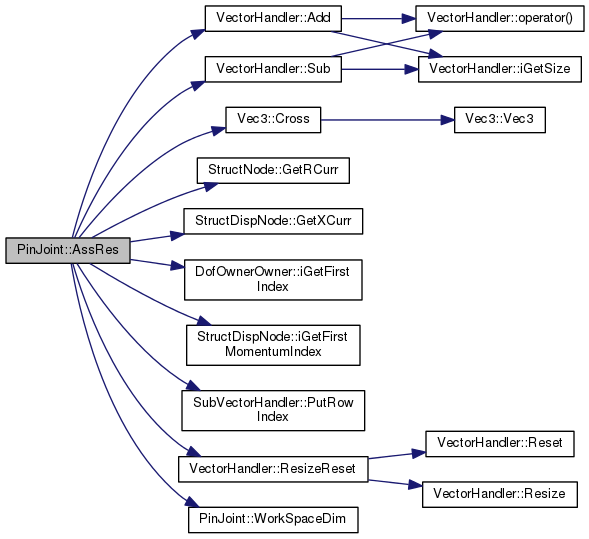
| SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| |
| DofOrder::Order | GetEqType (unsigned int i) const |
| |
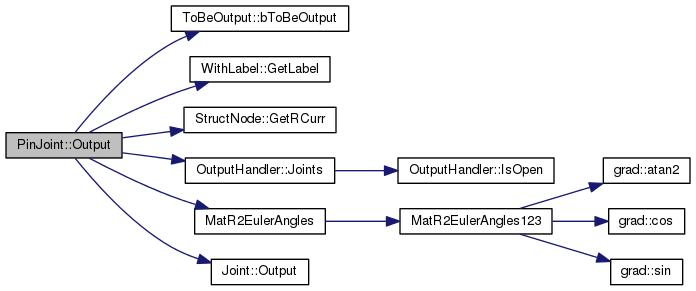
| virtual void | Output (OutputHandler &OH) const |
| |
| virtual unsigned int | iGetInitialNumDof (void) const |
| |
| virtual void | InitialWorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| |
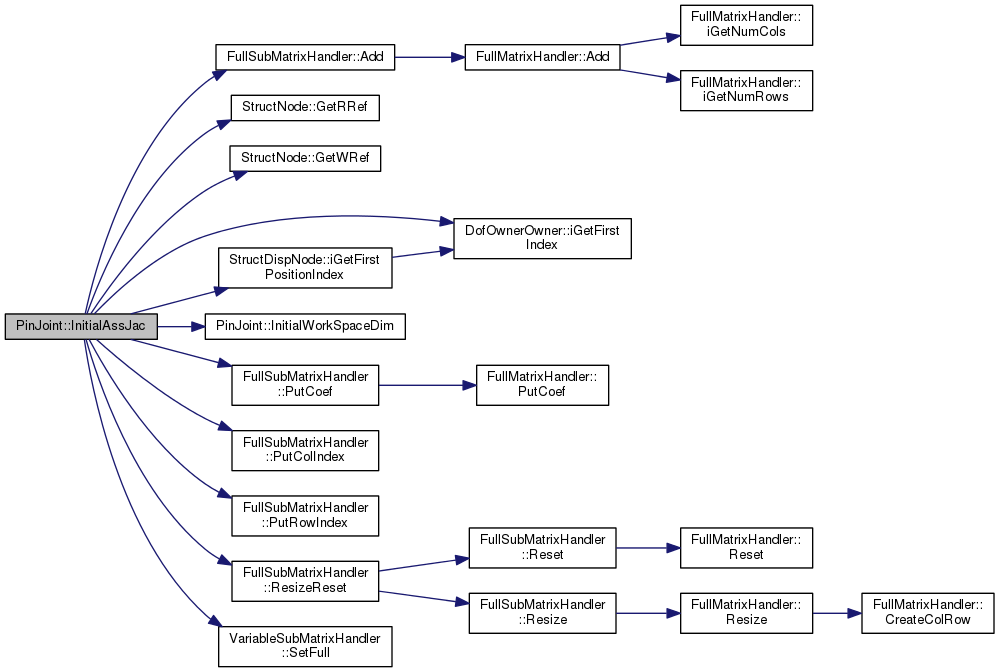
| VariableSubMatrixHandler & | InitialAssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| |
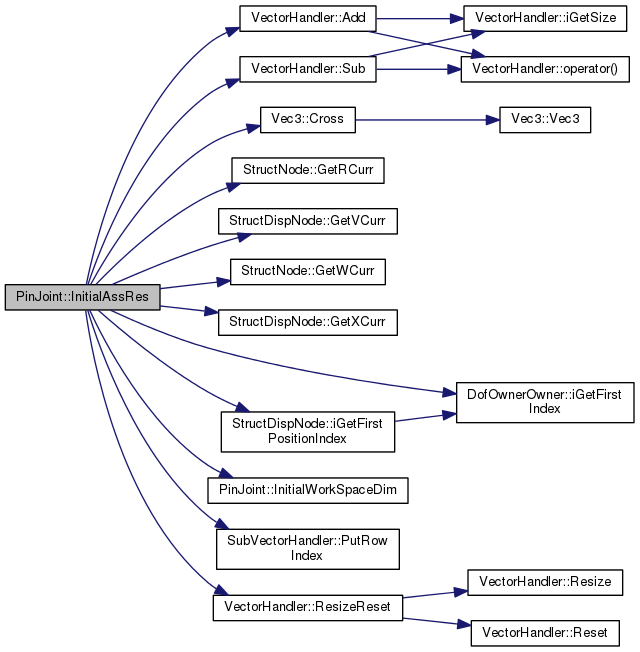
| SubVectorHandler & | InitialAssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr) |
| |
| virtual void | GetConnectedNodes (std::vector< const Node * > &connectedNodes) const |
| |
| | Elem (unsigned int uL, flag fOut) |
| |
| virtual | ~Elem (void) |
| |
| virtual std::ostream & | DescribeDof (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| |
| virtual void | DescribeDof (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| |
| virtual std::ostream & | DescribeEq (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| |
| virtual void | DescribeEq (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| |
| virtual void | AssMats (VariableSubMatrixHandler &WorkMatA, VariableSubMatrixHandler &WorkMatB, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| |
| virtual bool | bInverseDynamics (void) const |
| |
| void | SetInverseDynamicsFlags (unsigned uIDF) |
| |
| unsigned | GetInverseDynamicsFlags (void) const |
| |
| bool | bIsErgonomy (void) const |
| |
| bool | bIsRightHandSide (void) const |
| |
| virtual VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| |
| virtual SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr, const VectorHandler &XPrimePrimeCurr, InverseDynamics::Order iOrder=InverseDynamics::INVERSE_DYNAMICS) |
| |
| virtual int | GetNumConnectedNodes (void) const |
| |
| | WithLabel (unsigned int uL=0, const std::string &sN="") |
| |
| virtual | ~WithLabel (void) |
| |
| void | PutLabel (unsigned int uL) |
| |
| void | PutName (const std::string &sN) |
| |
| unsigned int | GetLabel (void) const |
| |
| const std::string & | GetName (void) const |
| |
| | SimulationEntity (void) |
| |
| virtual | ~SimulationEntity (void) |
| |
| virtual bool | bIsValidIndex (unsigned int i) const |
| |
| virtual Hint * | ParseHint (DataManager *pDM, const char *s) const |
| |
| virtual void | BeforePredict (VectorHandler &, VectorHandler &, VectorHandler &, VectorHandler &) const |
| |
| virtual void | AfterPredict (VectorHandler &X, VectorHandler &XP) |
| |
| virtual void | Update (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| |
| virtual void | DerivativesUpdate (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP) |
| |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP, const VectorHandler &XPP) |
| |
| virtual unsigned int | iGetNumPrivData (void) const |
| |
| virtual unsigned int | iGetPrivDataIdx (const char *s) const |
| |
| virtual doublereal | dGetPrivData (unsigned int i) const |
| |
| virtual std::ostream & | OutputAppend (std::ostream &out) const |
| |
| virtual void | ReadInitialState (MBDynParser &HP) |
| |
| | ToBeOutput (flag fOut=fDefaultOut) |
| |
| virtual | ~ToBeOutput (void) |
| |
| virtual void | OutputPrepare (OutputHandler &OH) |
| |
| virtual void | Output (OutputHandler &OH, const VectorHandler &X, const VectorHandler &XP) const |
| |
| virtual flag | fToBeOutput (void) const |
| |
| virtual bool | bToBeOutput (void) const |
| |
| virtual void | SetOutputFlag (flag f=flag(1)) |
| |
| | Joint (unsigned int uL, const DofOwner *pD, flag fOut) |
| |
| virtual | ~Joint (void) |
| |
| virtual Elem::Type | GetElemType (void) const |
| |
| std::ostream & | Output (std::ostream &out, const char *sJointName, unsigned int uLabel, const Vec3 &FLocal, const Vec3 &MLocal, const Vec3 &FGlobal, const Vec3 &MGlobal) const |
| |
| virtual void | SetInitialValue (VectorHandler &) |
| |
| virtual void | SetValue (DataManager *pDM, VectorHandler &, VectorHandler &, SimulationEntity::Hints *ph=0) |
| |
| virtual void | Update (const VectorHandler &XCurr, InverseDynamics::Order iOrder=InverseDynamics::INVERSE_DYNAMICS) |
| |
| bool | bIsPrescribedMotion (void) const |
| |
| bool | bIsTorque (void) const |
| |
| | ElemGravityOwner (unsigned int uL, flag fOut) |
| |
| virtual | ~ElemGravityOwner (void) |
| |
| virtual doublereal | dGetM (void) const |
| |
| Vec3 | GetS (void) const |
| |
| Mat3x3 | GetJ (void) const |
| |
| Vec3 | GetB (void) const |
| |
| Vec3 | GetG (void) const |
| |
| | GravityOwner (void) |
| |
| virtual | ~GravityOwner (void) |
| |
| void | PutGravity (const Gravity *pG) |
| |
| virtual bool | bGetGravity (const Vec3 &X, Vec3 &Acc) const |
| |
| | ElemWithDofs (unsigned int uL, const DofOwner *pDO, flag fOut) |
| |
| virtual | ~ElemWithDofs (void) |
| |
| | DofOwnerOwner (const DofOwner *pDO) |
| |
| virtual | ~DofOwnerOwner () |
| |
| virtual const DofOwner * | pGetDofOwner (void) const |
| |
| virtual integer | iGetFirstIndex (void) const |
| |
| | InitialAssemblyElem (unsigned int uL, flag fOut) |
| |
| virtual | ~InitialAssemblyElem (void) |
| |
| | SubjectToInitialAssembly (void) |
| |
| virtual | ~SubjectToInitialAssembly (void) |
| |
|
| enum | Type {
UNKNOWN = -1,
AIRPROPERTIES = 0,
INDUCEDVELOCITY,
AUTOMATICSTRUCTURAL,
GRAVITY,
BODY,
JOINT,
JOINT_REGULARIZATION,
BEAM,
PLATE,
FORCE,
INERTIA,
ELECTRICBULK,
ELECTRIC,
THERMAL,
HYDRAULIC,
BULK,
LOADABLE,
DRIVEN,
EXTERNAL,
AEROMODAL,
AERODYNAMIC,
GENEL,
SOCKETSTREAM_OUTPUT,
RTAI_OUTPUT = SOCKETSTREAM_OUTPUT,
LASTELEMTYPE
} |
| |
| typedef std::vector< Hint * > | Hints |
| |
| enum | { OUTPUT = 0x1U,
OUTPUT_MASK = 0xFU,
OUTPUT_PRIVATE = 0x10U,
OUTPUT_PRIVATE_MASK = ~OUTPUT_MASK
} |
| |
| enum | Type {
UNKNOWN = -1,
DISTANCE = 0,
DISTANCEWITHOFFSET,
CLAMP,
SPHERICALHINGE,
PIN,
UNIVERSALHINGE,
UNIVERSALROTATION,
UNIVERSALPIN,
PLANEHINGE,
PLANEROTATION,
PLANEPIN,
AXIALROTATION,
PLANEDISP,
PLANEDISPPIN,
INPLANE,
INPLANECONTACT,
J_INLINE,
ROD,
RODBEZIER,
DEFORMABLEHINGE,
DEFORMABLEDISPJOINT,
DEFORMABLEJOINT,
DEFORMABLEAXIALJOINT,
VISCOUSBODY,
LINEARVELOCITY,
ANGULARVELOCITY,
LINEARACCELERATION,
ANGULARACCELERATION,
PRISMATIC,
DRIVEHINGE,
DRIVEDISP,
DRIVEDISPPIN,
IMPOSEDORIENTATION,
IMPOSEDDISP,
IMPOSEDDISPPIN,
IMPOSEDKINEMATICS,
BEAMSLIDER,
BRAKE,
GIMBAL,
POINT_SURFACE_CONTACT,
TOTALJOINT,
TOTALPINJOINT,
TOTALEQUATION,
TOTALREACTION,
MODAL,
SCREWJOINT,
LASTJOINTTYPE
} |
| |
| virtual void | OutputPrepare_int (const std::string &type, OutputHandler &OH, std::string &name) |
| |
| virtual Vec3 | GetS_int (void) const |
| |
| virtual Mat3x3 | GetJ_int (void) const |
| |
| virtual Vec3 | GetB_int (void) const |
| |
| virtual Vec3 | GetG_int (void) const |
| |
| unsigned int | uLabel |
| |
| std::string | sName |
| |
| flag | fOutput |
| |
| Gravity * | pGravity |
| |
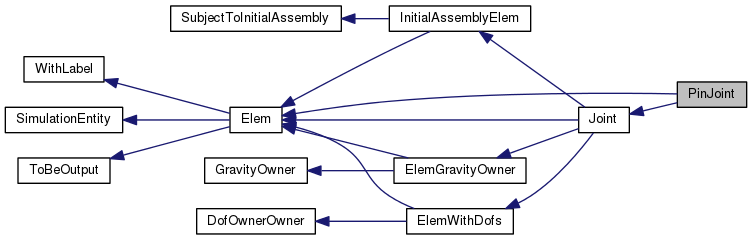
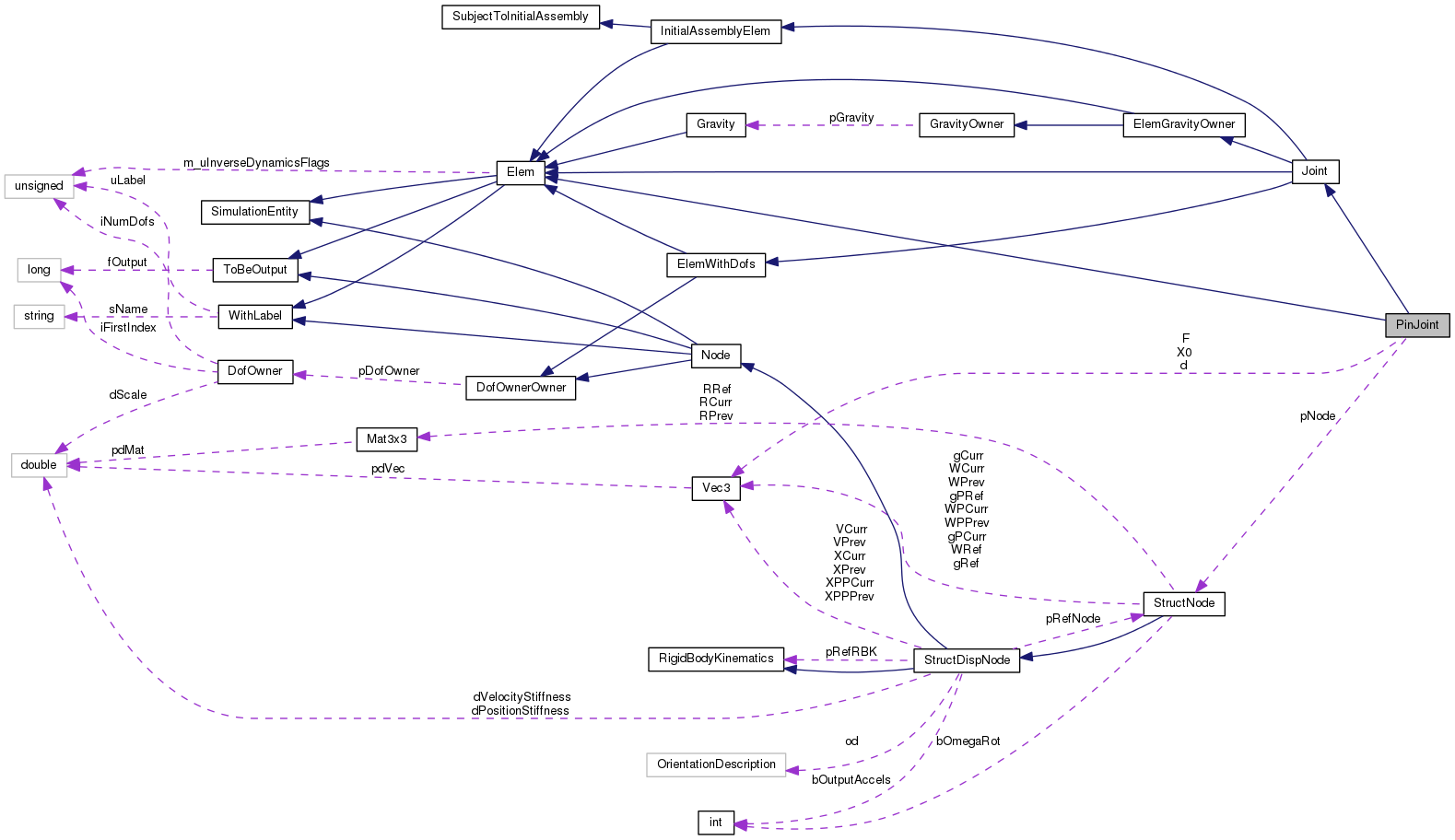
Definition at line 155 of file spherj.h.
 Public Member Functions inherited from Elem
Public Member Functions inherited from Elem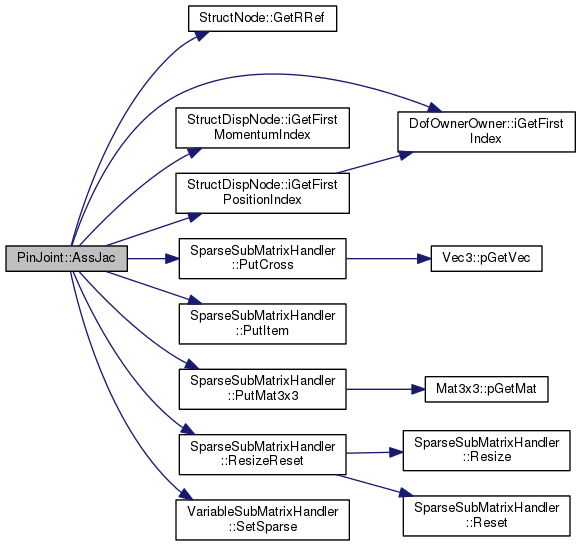

 1.8.7
1.8.7 
