|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
#include <friction.h>
Public Member Functions | |
| virtual void | SetValue (DataManager *pDM, VectorHandler &X, VectorHandler &XP, SimulationEntity::Hints *ph=0, const unsigned int solution_startdof=0) |
| virtual doublereal | fc (void) const =0 |
| virtual void | AssRes (SubVectorHandler &WorkVec, const unsigned int startdof, const unsigned int solution_startdof, const doublereal F, const doublereal v, const VectorHandler &X, const VectorHandler &XP)=0 throw (Elem::ChangedEquationStructure) |
| virtual void | AssJac (FullSubMatrixHandler &WorkMat, ExpandableRowVector &dfc, const unsigned int startdof, const unsigned int solution_startdof, const doublereal dCoef, const doublereal F, const doublereal v, const VectorHandler &X, const VectorHandler &XP, const ExpandableRowVector &dF, const ExpandableRowVector &dv) const =0 |
| virtual void | AfterConvergence (const doublereal F, const doublereal v, const VectorHandler &X, const VectorHandler &XP, const unsigned int solution_startdof) |
 Public Member Functions inherited from SimulationEntity Public Member Functions inherited from SimulationEntity | |
| SimulationEntity (void) | |
| virtual | ~SimulationEntity (void) |
| virtual unsigned int | iGetNumDof (void) const =0 |
| virtual std::ostream & | DescribeDof (std::ostream &out, const char *prefix="", bool bInitial=false) const =0 |
| virtual void | DescribeDof (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const =0 |
| virtual std::ostream & | DescribeEq (std::ostream &out, const char *prefix="", bool bInitial=false) const =0 |
| virtual void | DescribeEq (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const =0 |
| virtual bool | bIsValidIndex (unsigned int i) const |
| virtual DofOrder::Order | GetDofType (unsigned int i) const =0 |
| virtual DofOrder::Order | GetEqType (unsigned int i) const |
| virtual Hint * | ParseHint (DataManager *pDM, const char *s) const |
| virtual void | BeforePredict (VectorHandler &, VectorHandler &, VectorHandler &, VectorHandler &) const |
| virtual void | AfterPredict (VectorHandler &X, VectorHandler &XP) |
| virtual void | Update (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | DerivativesUpdate (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | Update (const VectorHandler &XCurr, InverseDynamics::Order iOrder) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP, const VectorHandler &XPP) |
| virtual unsigned int | iGetNumPrivData (void) const |
| virtual unsigned int | iGetPrivDataIdx (const char *s) const |
| virtual doublereal | dGetPrivData (unsigned int i) const |
| virtual std::ostream & | OutputAppend (std::ostream &out) const |
| virtual void | ReadInitialState (MBDynParser &HP) |
Private Member Functions | |
| void | SetValue (DataManager *pDM, VectorHandler &X, VectorHandler &XP, SimulationEntity::Hints *ph=0) |
Additional Inherited Members | |
| Public Types inherited from SimulationEntity | |
| typedef std::vector< Hint * > | Hints |
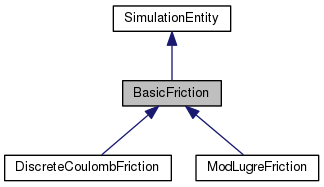
Base class for friction models
Definition at line 43 of file friction.h.
|
inlinevirtual |
Reimplemented in DiscreteCoulombFriction.
Definition at line 96 of file friction.h.
Referenced by Brake::AfterConvergence(), PlaneHingeJoint::AfterConvergence(), and AxialRotationJoint::AfterConvergence().
|
pure virtual |
Compute self jacobian and friction coefficient derivatives
Implemented in DiscreteCoulombFriction, and ModLugreFriction.
Referenced by Brake::AssJac(), PlaneHingeJoint::AssJac(), and AxialRotationJoint::AssJac().
|
pure virtual | ||||||||||||||||||||||||||||||||||||||||
Compute self residual and friction coefficient
Implemented in DiscreteCoulombFriction, and ModLugreFriction.
Referenced by Brake::AssRes(), PlaneHingeJoint::AssRes(), and AxialRotationJoint::AssRes().
|
pure virtual |
Return last computed friction coefficient
Implemented in DiscreteCoulombFriction, and ModLugreFriction.
Referenced by Brake::AssJac(), PlaneHingeJoint::AssJac(), AxialRotationJoint::AssJac(), Brake::AssRes(), PlaneHingeJoint::AssRes(), AxialRotationJoint::AssRes(), Brake::Output(), PlaneHingeJoint::Output(), and AxialRotationJoint::Output().
|
inlineprivatevirtual |
Reimplemented from SimulationEntity.
Definition at line 45 of file friction.h.
References NO_OP.
Referenced by Brake::SetValue(), PlaneHingeJoint::SetValue(), and AxialRotationJoint::SetValue().
|
virtual |
Set Initial Values
Reimplemented in DiscreteCoulombFriction, and ModLugreFriction.
Definition at line 52 of file friction.cc.
References NO_OP.
 1.8.7
1.8.7 
