|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
Classes | |
| struct | AeroNode |
Public Member Functions | |
| const StructNode * | pGetNacelleNode (void) const |
| const StructNode * | pGetHubNode (void) const |
| void | SetRotorSpeed (doublereal Omega) |
| doublereal | dGetHubTowerXYDistance (void) const |
| F_INTEGER | iGetNumBlades (void) const |
| F_INTEGER | iGetCurrBlade (void) const |
| const Mat3x3 & | GetCurrBladeR (void) const |
| F_INTEGER | iGetNumBladeElems (void) const |
| F_INTEGER | iGetCurrBladeElem (void) const |
| const StructNode * | pGetCurrBladeNode (void) const |
| doublereal | dGetCurrBladeNodeBuiltinTwist (void) const |
| void | SetCurrBladeNodePITNOW (doublereal PITNOW) |
| doublereal | dGetCurrBladeNodePITNOW (void) const |
| const Mat3x3 & | GetCurrBladeNodeRa (void) const |
| AeroDynModule (unsigned uLabel, const DofOwner *pDO, DataManager *pDM, MBDynParser &HP) | |
| ~AeroDynModule (void) | |
| unsigned int | iGetNumDof (void) const |
| DofOrder::Order | GetDofType (unsigned int i) const |
| void | Output (OutputHandler &OH) const |
| std::ostream & | Restart (std::ostream &out) const |
| void | WorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| void | AfterPredict (VectorHandler &X, VectorHandler &XP) |
| void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP) |
| unsigned int | iGetInitialNumDof (void) const |
| void | InitialWorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| VariableSubMatrixHandler & | InitialAssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| SubVectorHandler & | InitialAssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr) |
| void | SetValue (DataManager *pDM, VectorHandler &X, VectorHandler &XP, SimulationEntity::Hints *h=0) |
| unsigned int | iGetNumPrivData (void) const |
| int | GetNumConnectedNodes (void) const |
| void | GetConnectedNodes (std::vector< const Node * > &connectedNodes) const |
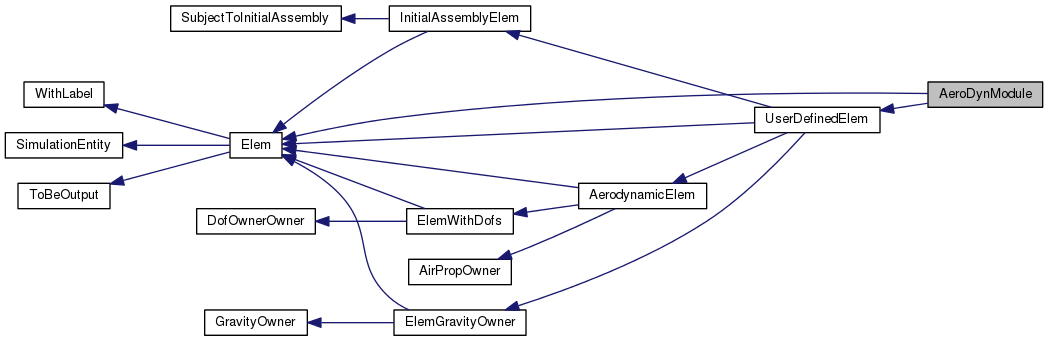
 Public Member Functions inherited from Elem Public Member Functions inherited from Elem | |
| Elem (unsigned int uL, flag fOut) | |
| virtual | ~Elem (void) |
| virtual std::ostream & | DescribeDof (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeDof (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual std::ostream & | DescribeEq (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeEq (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual void | AssMats (VariableSubMatrixHandler &WorkMatA, VariableSubMatrixHandler &WorkMatB, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual bool | bInverseDynamics (void) const |
| void | SetInverseDynamicsFlags (unsigned uIDF) |
| unsigned | GetInverseDynamicsFlags (void) const |
| bool | bIsErgonomy (void) const |
| bool | bIsRightHandSide (void) const |
| virtual VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| virtual SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr, const VectorHandler &XPrimePrimeCurr, InverseDynamics::Order iOrder=InverseDynamics::INVERSE_DYNAMICS) |
| Public Member Functions inherited from WithLabel | |
| WithLabel (unsigned int uL=0, const std::string &sN="") | |
| virtual | ~WithLabel (void) |
| void | PutLabel (unsigned int uL) |
| void | PutName (const std::string &sN) |
| unsigned int | GetLabel (void) const |
| const std::string & | GetName (void) const |
| Public Member Functions inherited from SimulationEntity | |
| SimulationEntity (void) | |
| virtual | ~SimulationEntity (void) |
| virtual bool | bIsValidIndex (unsigned int i) const |
| virtual DofOrder::Order | GetEqType (unsigned int i) const |
| virtual Hint * | ParseHint (DataManager *pDM, const char *s) const |
| virtual void | BeforePredict (VectorHandler &, VectorHandler &, VectorHandler &, VectorHandler &) const |
| virtual void | Update (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | DerivativesUpdate (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | Update (const VectorHandler &XCurr, InverseDynamics::Order iOrder) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP, const VectorHandler &XPP) |
| virtual unsigned int | iGetPrivDataIdx (const char *s) const |
| virtual doublereal | dGetPrivData (unsigned int i) const |
| virtual std::ostream & | OutputAppend (std::ostream &out) const |
| virtual void | ReadInitialState (MBDynParser &HP) |
| Public Member Functions inherited from ToBeOutput | |
| ToBeOutput (flag fOut=fDefaultOut) | |
| virtual | ~ToBeOutput (void) |
| virtual void | OutputPrepare (OutputHandler &OH) |
| virtual void | Output (OutputHandler &OH, const VectorHandler &X, const VectorHandler &XP) const |
| virtual flag | fToBeOutput (void) const |
| virtual bool | bToBeOutput (void) const |
| virtual void | SetOutputFlag (flag f=flag(1)) |
| Public Member Functions inherited from UserDefinedElem | |
| UserDefinedElem (unsigned uLabel, const DofOwner *pDO) | |
| virtual | ~UserDefinedElem (void) |
| bool | NeedsAirProperties (void) const |
| void | NeedsAirProperties (bool yesno) |
| virtual Elem::Type | GetElemType (void) const |
| virtual AerodynamicElem::Type | GetAerodynamicElemType (void) const |
| Public Member Functions inherited from InitialAssemblyElem | |
| InitialAssemblyElem (unsigned int uL, flag fOut) | |
| virtual | ~InitialAssemblyElem (void) |
| Public Member Functions inherited from SubjectToInitialAssembly | |
| SubjectToInitialAssembly (void) | |
| virtual | ~SubjectToInitialAssembly (void) |
| Public Member Functions inherited from AerodynamicElem | |
| AerodynamicElem (unsigned int uL, const DofOwner *pDO, flag fOut) | |
| virtual | ~AerodynamicElem (void) |
| virtual const InducedVelocity * | pGetInducedVelocity (void) const |
| Public Member Functions inherited from ElemWithDofs | |
| ElemWithDofs (unsigned int uL, const DofOwner *pDO, flag fOut) | |
| virtual | ~ElemWithDofs (void) |
| Public Member Functions inherited from DofOwnerOwner | |
| DofOwnerOwner (const DofOwner *pDO) | |
| virtual | ~DofOwnerOwner () |
| virtual const DofOwner * | pGetDofOwner (void) const |
| virtual integer | iGetFirstIndex (void) const |
| virtual void | SetInitialValue (VectorHandler &X) |
| Public Member Functions inherited from AirPropOwner | |
| AirPropOwner (void) | |
| virtual | ~AirPropOwner (void) |
| virtual void | PutAirProperties (const AirProperties *pAP) |
| virtual flag | fGetAirVelocity (Vec3 &Velocity, const Vec3 &X) const |
| virtual doublereal | dGetAirDensity (const Vec3 &X) const |
| virtual doublereal | dGetAirPressure (const Vec3 &X) const |
| virtual doublereal | dGetAirTemperature (const Vec3 &X) const |
| virtual doublereal | dGetSoundSpeed (const Vec3 &X) const |
| virtual bool | GetAirProps (const Vec3 &X, doublereal &rho, doublereal &c, doublereal &p, doublereal &T) const |
| Public Member Functions inherited from ElemGravityOwner | |
| ElemGravityOwner (unsigned int uL, flag fOut) | |
| virtual | ~ElemGravityOwner (void) |
| virtual doublereal | dGetM (void) const |
| Vec3 | GetS (void) const |
| Mat3x3 | GetJ (void) const |
| Vec3 | GetB (void) const |
| Vec3 | GetG (void) const |
| Public Member Functions inherited from GravityOwner | |
| GravityOwner (void) | |
| virtual | ~GravityOwner (void) |
| void | PutGravity (const Gravity *pG) |
| virtual bool | bGetGravity (const Vec3 &X, Vec3 &Acc) const |
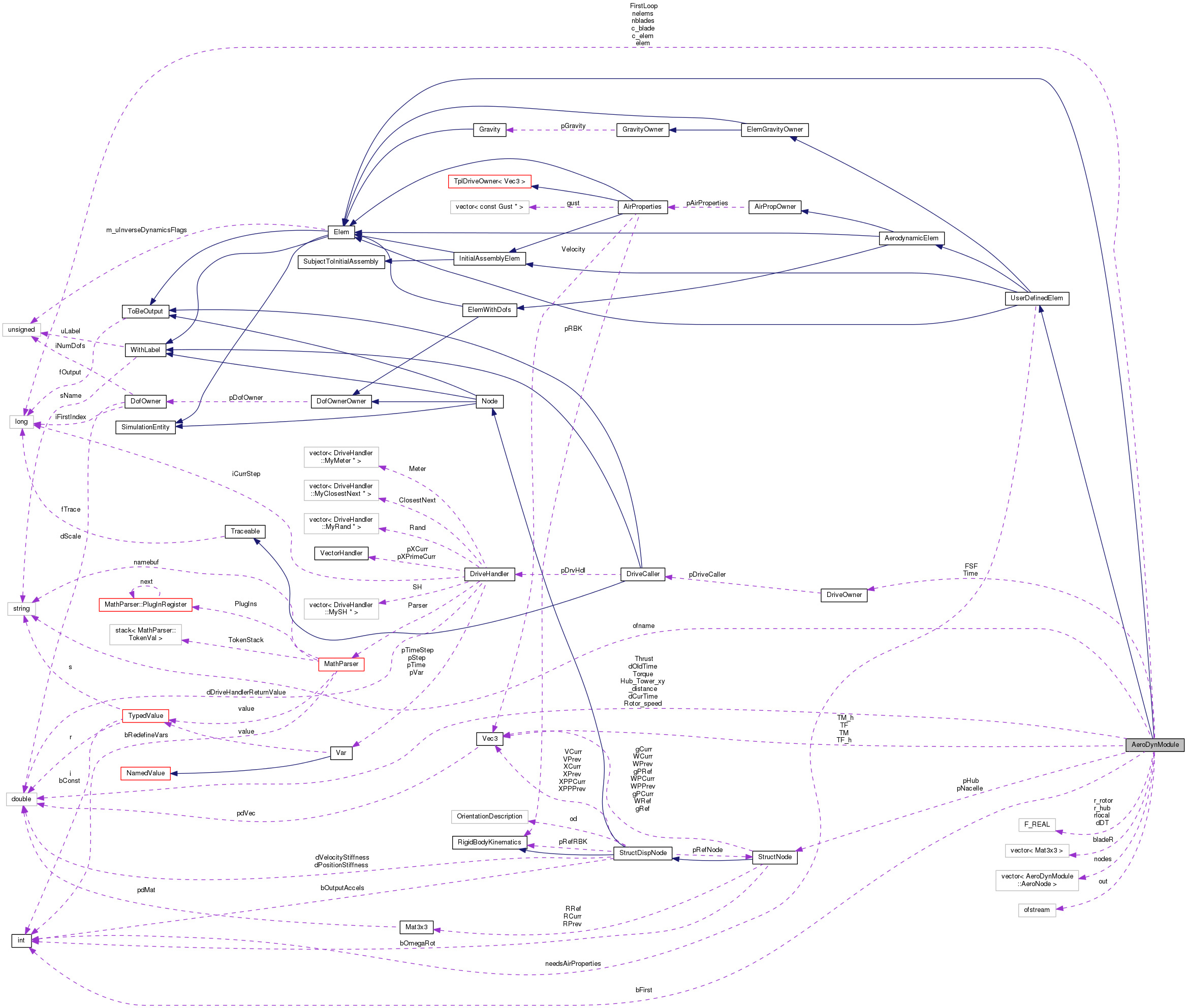
Private Attributes | |
| StructNode * | pNacelle |
| StructNode * | pHub |
| integer | nblades |
| integer | nelems |
| doublereal | Hub_Tower_xy_distance |
| std::vector< AeroNode > | nodes |
| std::vector< Mat3x3 > | bladeR |
| std::string | ofname |
| std::ofstream | out |
| Vec3 | TF |
| Vec3 | TM |
| Vec3 | TF_h |
| Vec3 | TM_h |
| doublereal | Thrust |
| doublereal | Torque |
| doublereal | Rotor_speed |
| F_LOGICAL | FirstLoop |
| F_INTEGER | elem |
| F_INTEGER | c_elem |
| F_INTEGER | c_blade |
| F_REAL | rlocal |
| F_REAL | r_hub |
| F_REAL | r_rotor |
| bool | bFirst |
| DriveOwner | Time |
| doublereal | dOldTime |
| doublereal | dCurTime |
| F_REAL | dDT |
| DriveOwner | FSF |
Definition at line 72 of file module-aerodyn.cc.
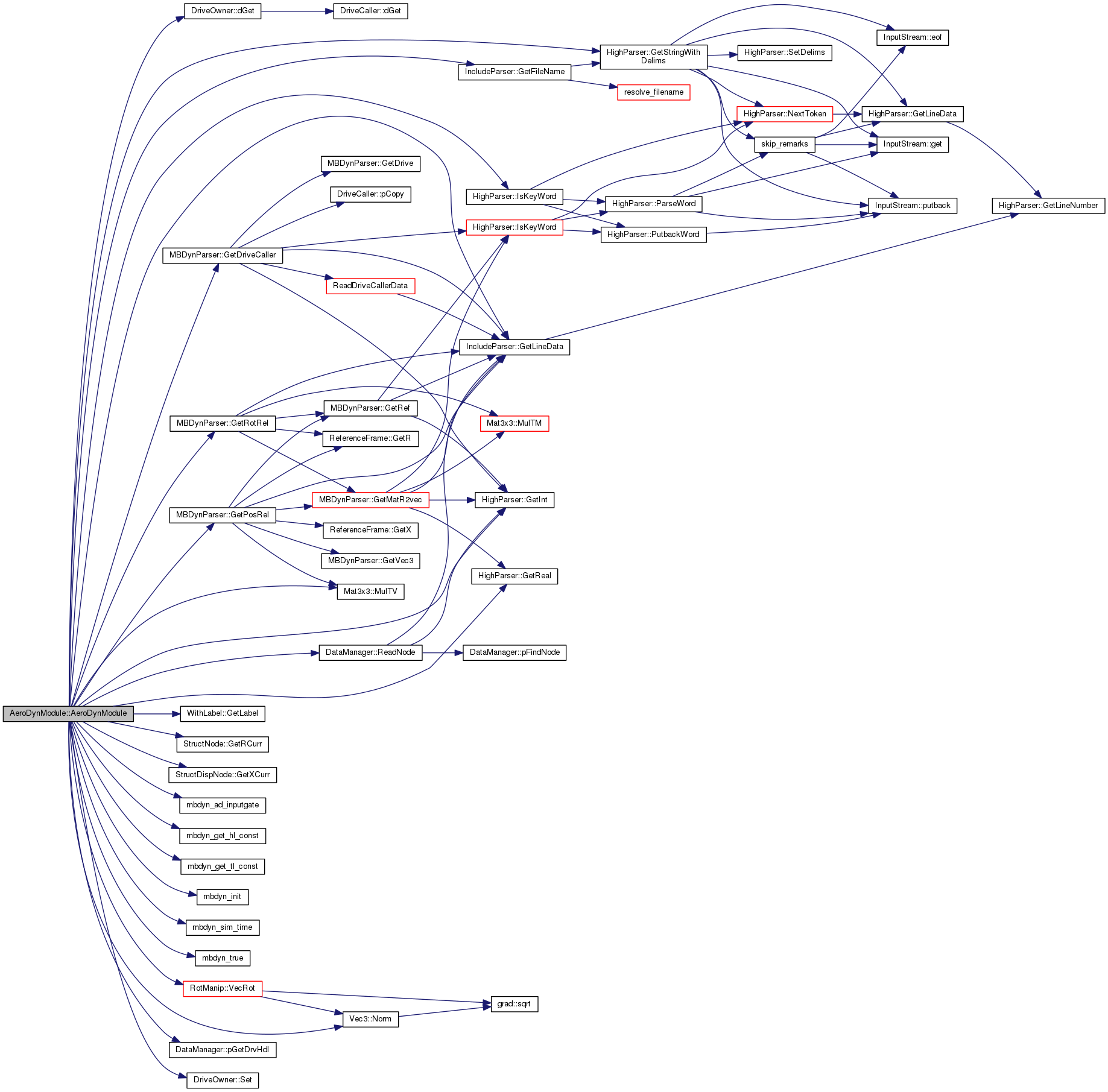
| AeroDynModule::AeroDynModule | ( | unsigned | uLabel, |
| const DofOwner * | pDO, | ||
| DataManager * | pDM, | ||
| MBDynParser & | HP | ||
| ) |
Definition at line 227 of file module-aerodyn.cc.
References bladeR, c_elem, dCurTime, DriveOwner::dGet(), elem, Eye3, FirstLoop, FSF, MBDynParser::GetDriveCaller(), IncludeParser::GetFileName(), HighParser::GetInt(), WithLabel::GetLabel(), IncludeParser::GetLineData(), MBDynParser::GetPosRel(), StructNode::GetRCurr(), HighParser::GetReal(), MBDynParser::GetRotRel(), HighParser::GetStringWithDelims(), StructDispNode::GetXCurr(), Hub_Tower_xy_distance, HighParser::IsKeyWord(), mbdyn_ad_inputgate(), MBDYN_EXCEPT_ARGS, mbdyn_get_hl_const(), mbdyn_get_tl_const(), mbdyn_init(), mbdyn_sim_time(), mbdyn_true(), module_aerodyn, Mat3x3::MulTV(), nblades, nelems, nodes, Vec3::Norm(), ofname, out, DataManager::pGetDrvHdl(), pHub, pNacelle, r_hub, r_rotor, DataManager::ReadNode(), rlocal, DriveOwner::Set(), Node::STRUCTURAL, Time, RotManip::VecRot(), and Zero3.
| AeroDynModule::~AeroDynModule | ( | void | ) |
Definition at line 474 of file module-aerodyn.cc.
References NO_OP.
|
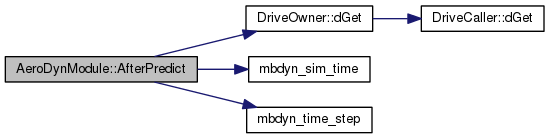
virtual |
Reimplemented from SimulationEntity.
Definition at line 729 of file module-aerodyn.cc.
References DriveOwner::dGet(), dOldTime, and Time.

|
virtual |
Reimplemented from SimulationEntity.
Definition at line 705 of file module-aerodyn.cc.
References bFirst, dCurTime, dDT, DriveOwner::dGet(), dOldTime, mbdyn_sim_time(), mbdyn_time_step(), and Time.
|
virtual |
Implements Elem.
Definition at line 519 of file module-aerodyn.cc.
References VariableSubMatrixHandler::SetNullMatrix().

|
virtual |
Implements Elem.
Definition at line 531 of file module-aerodyn.cc.
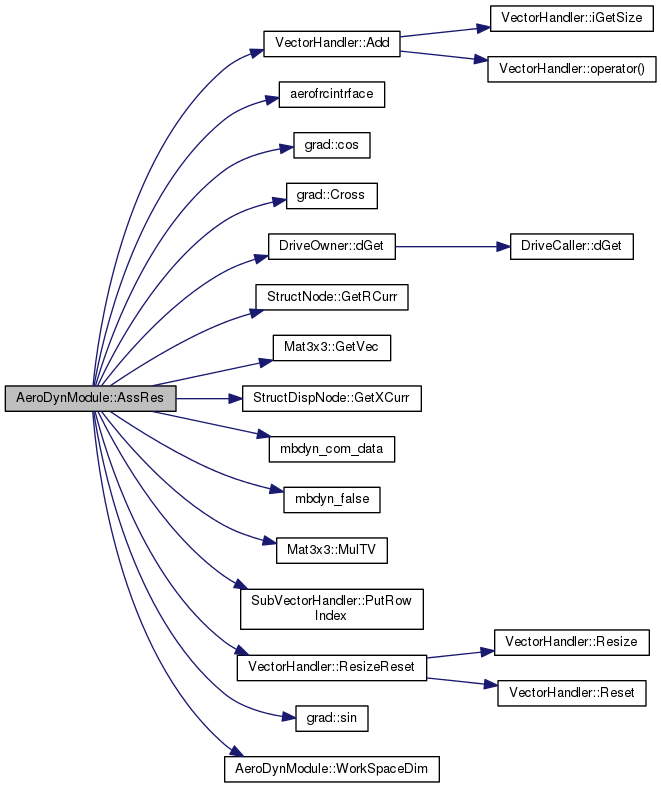
References VectorHandler::Add(), aerofrcintrface(), ASSERT, bFirst, bladeR, c, c_blade, c_elem, grad::cos(), grad::Cross(), DriveOwner::dGet(), elem, FirstLoop, FSF, StructNode::GetRCurr(), Mat3x3::GetVec(), StructDispNode::GetXCurr(), mbdyn_com_data(), mbdyn_false(), Mat3x3::MulTV(), nblades, nelems, nodes, pHub, SubVectorHandler::PutRowIndex(), VectorHandler::ResizeReset(), grad::sin(), TF, TF_h, Thrust, TM, TM_h, Torque, WorkSpaceDim(), and Zero3.
| doublereal AeroDynModule::dGetCurrBladeNodeBuiltinTwist | ( | void | ) | const |
Definition at line 896 of file module-aerodyn.cc.
References ASSERT, elem, nblades, nelems, and nodes.
Referenced by getelemparams().
| doublereal AeroDynModule::dGetCurrBladeNodePITNOW | ( | void | ) | const |
| doublereal AeroDynModule::dGetHubTowerXYDistance | ( | void | ) | const |
Definition at line 835 of file module-aerodyn.cc.
References Hub_Tower_xy_distance.
Referenced by getrotorparams().
|
virtual |
| const Mat3x3 & AeroDynModule::GetCurrBladeNodeRa | ( | void | ) | const |
| const Mat3x3 & AeroDynModule::GetCurrBladeR | ( | void | ) | const |
Definition at line 859 of file module-aerodyn.cc.
References ASSERT, bladeR, c_blade, and nblades.
Referenced by getbladeparams(), and getelemparams().
|
virtual |
Reimplemented from Elem.
Definition at line 486 of file module-aerodyn.cc.
References DofOrder::UNKNOWN.
|
virtual |
| F_INTEGER AeroDynModule::iGetCurrBlade | ( | void | ) | const |
Definition at line 849 of file module-aerodyn.cc.
References ASSERT, c_blade, and nblades.
Referenced by getbladeparams().
| F_INTEGER AeroDynModule::iGetCurrBladeElem | ( | void | ) | const |
|
virtual |
Implements SubjectToInitialAssembly.
Definition at line 737 of file module-aerodyn.cc.
| F_INTEGER AeroDynModule::iGetNumBladeElems | ( | void | ) | const |
Definition at line 869 of file module-aerodyn.cc.
References nelems.
| F_INTEGER AeroDynModule::iGetNumBlades | ( | void | ) | const |
|
virtual |
Reimplemented from Elem.
Definition at line 480 of file module-aerodyn.cc.
|
virtual |
Reimplemented from SimulationEntity.
Definition at line 784 of file module-aerodyn.cc.
|
virtual |
Implements SubjectToInitialAssembly.
Definition at line 750 of file module-aerodyn.cc.
References ASSERT, and VariableSubMatrixHandler::SetNullMatrix().

|
virtual |
Implements SubjectToInitialAssembly.
Definition at line 763 of file module-aerodyn.cc.
References ASSERT, and VectorHandler::ResizeReset().

Implements SubjectToInitialAssembly.
Definition at line 743 of file module-aerodyn.cc.
References nblades, and nelems.
|
virtual |
Reimplemented from ToBeOutput.
Definition at line 492 of file module-aerodyn.cc.
References dCurTime, out, Rotor_speed, Thrust, and Torque.
| const StructNode * AeroDynModule::pGetCurrBladeNode | ( | void | ) | const |
Definition at line 886 of file module-aerodyn.cc.
References ASSERT, elem, nblades, nelems, and nodes.
Referenced by getelemparams(), and getvnvt().
| const StructNode * AeroDynModule::pGetHubNode | ( | void | ) | const |
Definition at line 821 of file module-aerodyn.cc.
References pHub.
Referenced by getbladeparams(), getelemparams(), and getrotorparams().
| const StructNode * AeroDynModule::pGetNacelleNode | ( | void | ) | const |
Definition at line 814 of file module-aerodyn.cc.
References pNacelle.
Referenced by getbladeparams(), getelemparams(), and getrotorparams().
|
virtual |
| void AeroDynModule::SetCurrBladeNodePITNOW | ( | doublereal | PITNOW | ) |
Definition at line 906 of file module-aerodyn.cc.
References ASSERT, elem, nblades, nelems, and nodes.
Referenced by getelemparams().
| void AeroDynModule::SetRotorSpeed | ( | doublereal | Omega | ) |
Definition at line 828 of file module-aerodyn.cc.
References Rotor_speed.
Referenced by getrotorparams().
|
virtual |
Reimplemented from SimulationEntity.
Definition at line 776 of file module-aerodyn.cc.
References bFirst.
|
private |
Definition at line 142 of file module-aerodyn.cc.
Referenced by AfterPredict(), AssRes(), and SetValue().
|
private |
Definition at line 115 of file module-aerodyn.cc.
Referenced by AeroDynModule(), AssRes(), and GetCurrBladeR().
|
private |
Definition at line 137 of file module-aerodyn.cc.
Referenced by AssRes(), GetCurrBladeR(), and iGetCurrBlade().
|
private |
Definition at line 136 of file module-aerodyn.cc.
Referenced by AeroDynModule(), and AssRes().
|
private |
Definition at line 145 of file module-aerodyn.cc.
Referenced by AeroDynModule(), AfterPredict(), and Output().
|
private |
Definition at line 146 of file module-aerodyn.cc.
Referenced by AfterPredict().
|
private |
Definition at line 144 of file module-aerodyn.cc.
Referenced by AfterConvergence(), and AfterPredict().
|
private |
Definition at line 135 of file module-aerodyn.cc.
Referenced by AeroDynModule(), AssRes(), dGetCurrBladeNodeBuiltinTwist(), dGetCurrBladeNodePITNOW(), GetCurrBladeNodeRa(), iGetCurrBladeElem(), pGetCurrBladeNode(), and SetCurrBladeNodePITNOW().
|
private |
Definition at line 134 of file module-aerodyn.cc.
Referenced by AeroDynModule(), and AssRes().
|
private |
Definition at line 148 of file module-aerodyn.cc.
Referenced by AeroDynModule(), and AssRes().
|
private |
Definition at line 109 of file module-aerodyn.cc.
Referenced by AeroDynModule(), and dGetHubTowerXYDistance().
|
private |
Definition at line 106 of file module-aerodyn.cc.
Referenced by AeroDynModule(), AssRes(), dGetCurrBladeNodeBuiltinTwist(), dGetCurrBladeNodePITNOW(), GetCurrBladeNodeRa(), GetCurrBladeR(), iGetCurrBlade(), iGetCurrBladeElem(), iGetNumBlades(), InitialWorkSpaceDim(), pGetCurrBladeNode(), SetCurrBladeNodePITNOW(), and WorkSpaceDim().
|
private |
Definition at line 107 of file module-aerodyn.cc.
Referenced by AeroDynModule(), AssRes(), dGetCurrBladeNodeBuiltinTwist(), dGetCurrBladeNodePITNOW(), GetCurrBladeNodeRa(), iGetCurrBladeElem(), iGetNumBladeElems(), InitialWorkSpaceDim(), pGetCurrBladeNode(), SetCurrBladeNodePITNOW(), and WorkSpaceDim().
|
private |
Definition at line 114 of file module-aerodyn.cc.
Referenced by AeroDynModule(), AssRes(), dGetCurrBladeNodeBuiltinTwist(), dGetCurrBladeNodePITNOW(), GetConnectedNodes(), GetCurrBladeNodeRa(), GetNumConnectedNodes(), pGetCurrBladeNode(), and SetCurrBladeNodePITNOW().
|
private |
Definition at line 117 of file module-aerodyn.cc.
Referenced by AeroDynModule().
|
mutableprivate |
Definition at line 118 of file module-aerodyn.cc.
Referenced by AeroDynModule(), and Output().
|
private |
Definition at line 104 of file module-aerodyn.cc.
Referenced by AeroDynModule(), AssRes(), GetConnectedNodes(), and pGetHubNode().
|
private |
Nacelle node; requirements:
Definition at line 103 of file module-aerodyn.cc.
Referenced by AeroDynModule(), GetConnectedNodes(), and pGetNacelleNode().
|
private |
Definition at line 139 of file module-aerodyn.cc.
Referenced by AeroDynModule().
|
private |
Definition at line 140 of file module-aerodyn.cc.
Referenced by AeroDynModule().
|
private |
Definition at line 138 of file module-aerodyn.cc.
Referenced by AeroDynModule().
|
private |
Definition at line 129 of file module-aerodyn.cc.
Referenced by Output(), and SetRotorSpeed().
|
private |
Definition at line 123 of file module-aerodyn.cc.
Referenced by AssRes().
|
private |
Definition at line 125 of file module-aerodyn.cc.
Referenced by AssRes().
|
private |
Definition at line 127 of file module-aerodyn.cc.
|
private |
Definition at line 143 of file module-aerodyn.cc.
Referenced by AeroDynModule(), AfterConvergence(), and AfterPredict().
|
private |
Definition at line 124 of file module-aerodyn.cc.
Referenced by AssRes().
|
private |
Definition at line 126 of file module-aerodyn.cc.
Referenced by AssRes().
|
private |
Definition at line 128 of file module-aerodyn.cc.
 1.8.7
1.8.7 
