|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
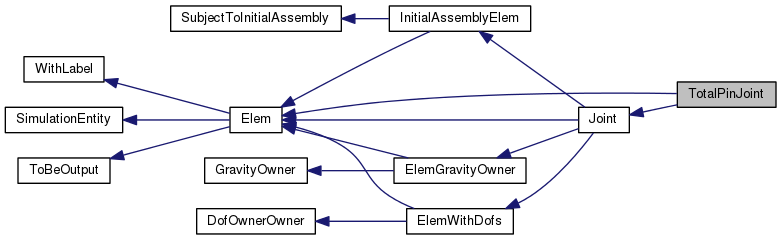
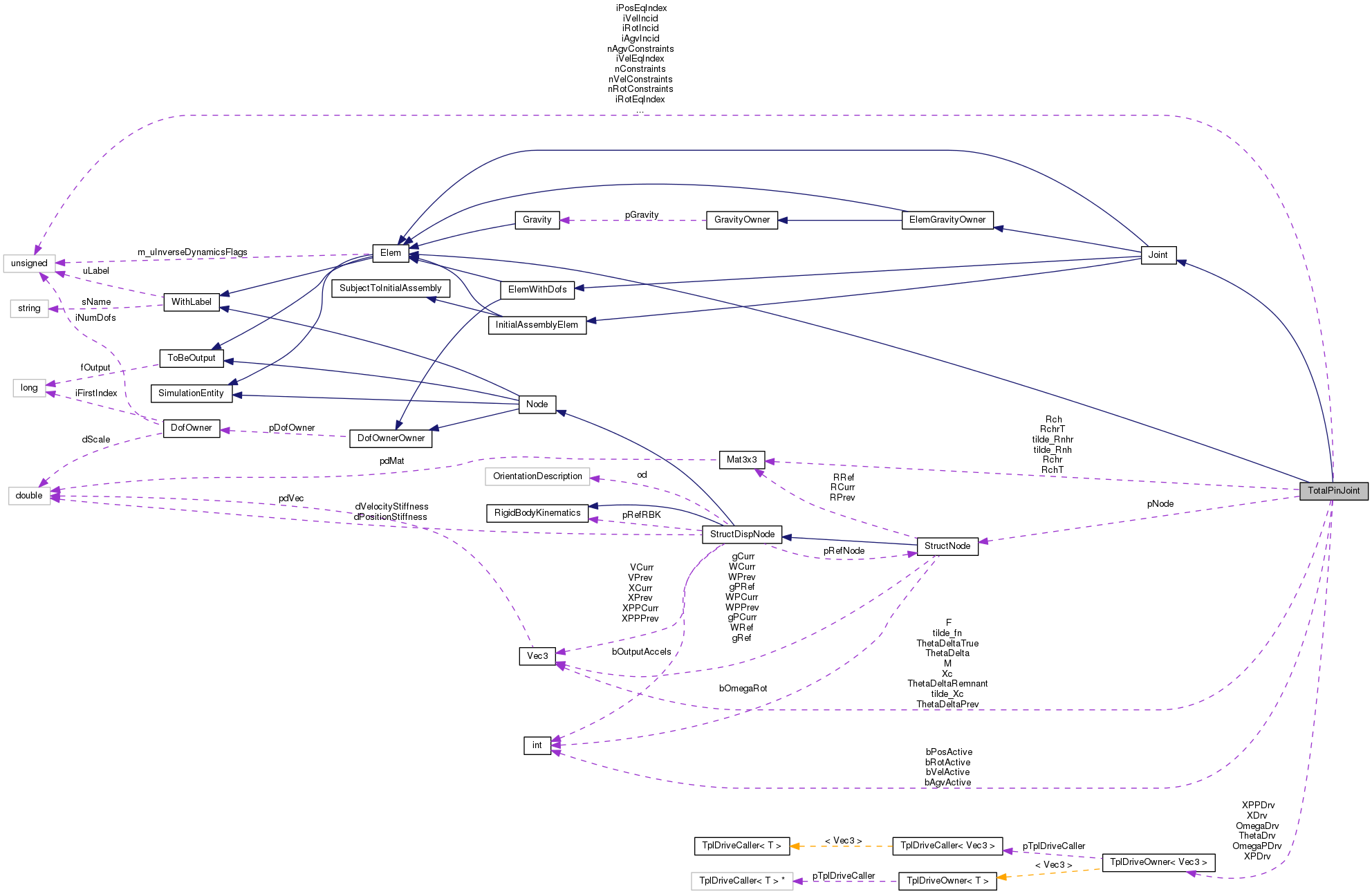
#include <totalj.h>
Public Member Functions | |
| TotalPinJoint (unsigned int uL, const DofOwner *pDO, bool bPos[3], bool bVel[3], TplDriveCaller< Vec3 > *const pDCPos[3], bool bRot[3], bool bAgv[3], TplDriveCaller< Vec3 > *const pDCRot[3], const Vec3 &XcTmp, const Mat3x3 &RchTmp, const Mat3x3 &RchrTmp, const StructNode *pN, const Vec3 &fnTmp, const Mat3x3 &RnhTmp, const Mat3x3 &RnhrTmp, flag fOut) | |
| ~TotalPinJoint (void) | |
| virtual std::ostream & | Restart (std::ostream &out) const |
| virtual Joint::Type | GetJointType (void) const |
| virtual unsigned int | iGetNumDof (void) const |
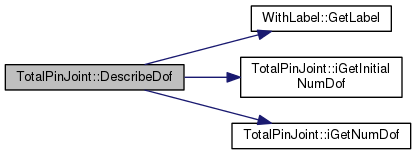
| virtual std::ostream & | DescribeDof (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeDof (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
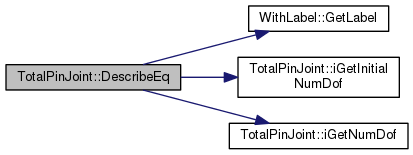
| virtual std::ostream & | DescribeEq (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeEq (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| DofOrder::Order | GetDofType (unsigned int i) const |
| virtual void | SetValue (DataManager *pDM, VectorHandler &X, VectorHandler &XP, SimulationEntity::Hints *ph=0) |
| virtual Hint * | ParseHint (DataManager *pDM, const char *s) const |
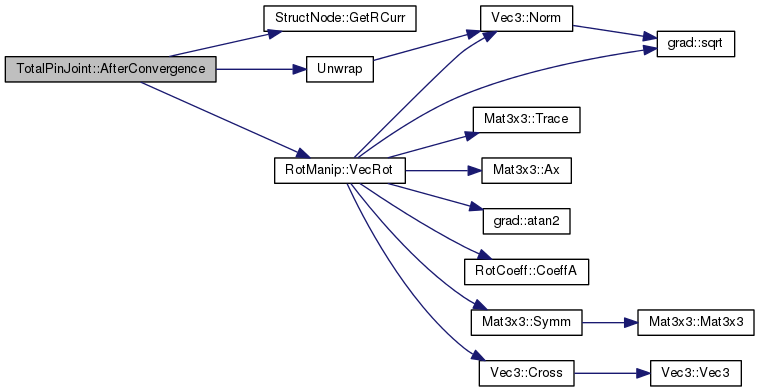
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP, const VectorHandler &XPP) |
| void | WorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
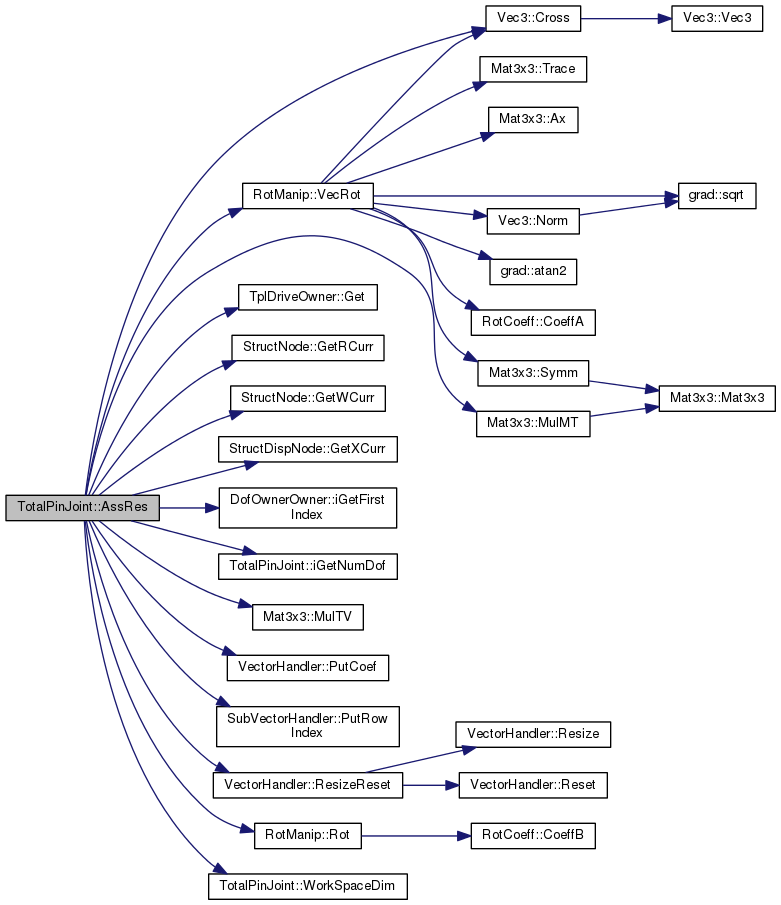
| SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual bool | bInverseDynamics (void) const |
| VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr, const VectorHandler &XPrimePrimeCurr, InverseDynamics::Order iOrder=InverseDynamics::INVERSE_DYNAMICS) |
| virtual void | Update (const VectorHandler &XCurr, InverseDynamics::Order iOrder=InverseDynamics::INVERSE_DYNAMICS) |
| DofOrder::Order | GetEqType (unsigned int i) const |
| void | OutputPrepare (OutputHandler &OH) |
| void | Output (OutputHandler &OH) const |
| virtual unsigned int | iGetInitialNumDof (void) const |
| virtual void | InitialWorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
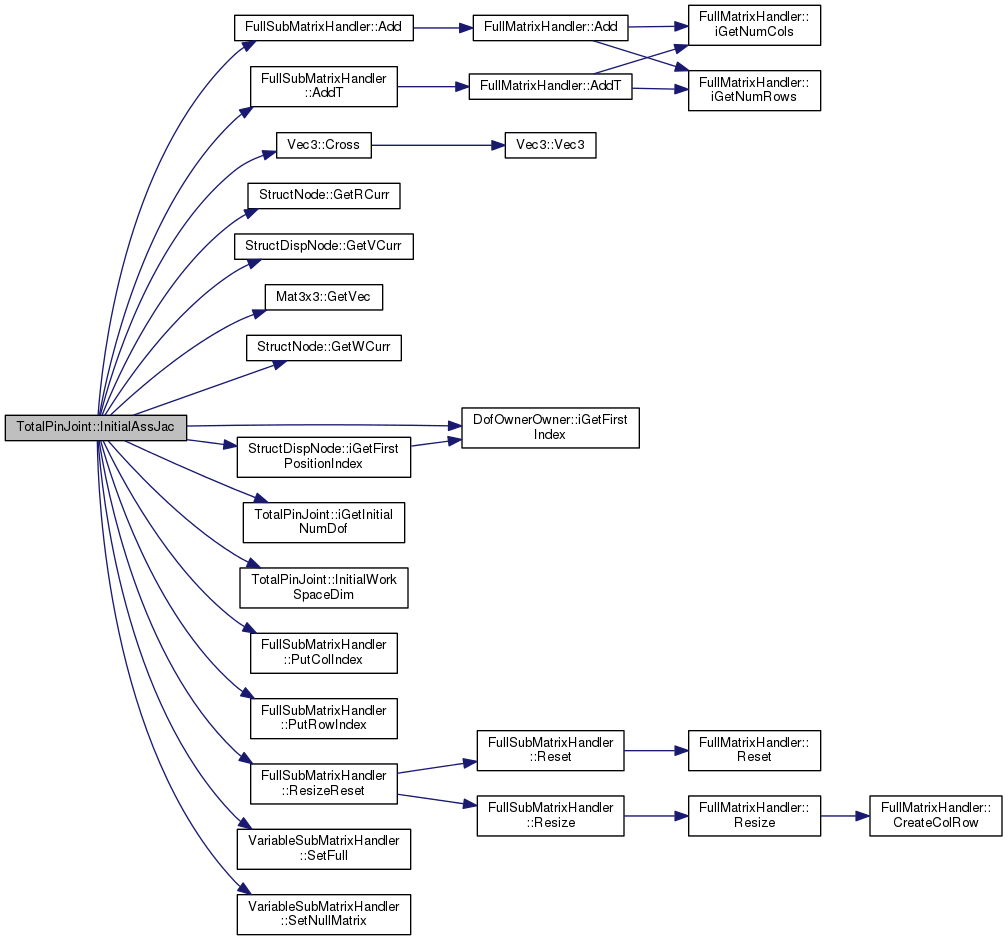
| VariableSubMatrixHandler & | InitialAssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| SubVectorHandler & | InitialAssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr) |
| virtual unsigned int | iGetNumPrivData (void) const |
| virtual unsigned int | iGetPrivDataIdx (const char *s) const |
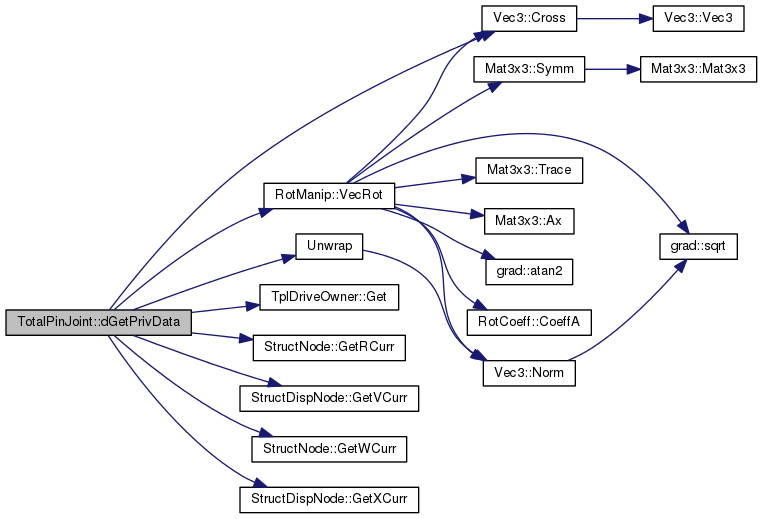
| virtual doublereal | dGetPrivData (unsigned int i) const |
| virtual void | GetConnectedNodes (std::vector< const Node * > &connectedNodes) const |
 Public Member Functions inherited from Elem Public Member Functions inherited from Elem | |
| Elem (unsigned int uL, flag fOut) | |
| virtual | ~Elem (void) |
| virtual void | AssMats (VariableSubMatrixHandler &WorkMatA, VariableSubMatrixHandler &WorkMatB, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| void | SetInverseDynamicsFlags (unsigned uIDF) |
| unsigned | GetInverseDynamicsFlags (void) const |
| bool | bIsErgonomy (void) const |
| bool | bIsRightHandSide (void) const |
| virtual int | GetNumConnectedNodes (void) const |
| Public Member Functions inherited from WithLabel | |
| WithLabel (unsigned int uL=0, const std::string &sN="") | |
| virtual | ~WithLabel (void) |
| void | PutLabel (unsigned int uL) |
| void | PutName (const std::string &sN) |
| unsigned int | GetLabel (void) const |
| const std::string & | GetName (void) const |
| Public Member Functions inherited from SimulationEntity | |
| SimulationEntity (void) | |
| virtual | ~SimulationEntity (void) |
| virtual bool | bIsValidIndex (unsigned int i) const |
| virtual void | BeforePredict (VectorHandler &, VectorHandler &, VectorHandler &, VectorHandler &) const |
| virtual void | AfterPredict (VectorHandler &X, VectorHandler &XP) |
| virtual void | Update (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | DerivativesUpdate (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual std::ostream & | OutputAppend (std::ostream &out) const |
| virtual void | ReadInitialState (MBDynParser &HP) |
| Public Member Functions inherited from ToBeOutput | |
| ToBeOutput (flag fOut=fDefaultOut) | |
| virtual | ~ToBeOutput (void) |
| virtual void | Output (OutputHandler &OH, const VectorHandler &X, const VectorHandler &XP) const |
| virtual flag | fToBeOutput (void) const |
| virtual bool | bToBeOutput (void) const |
| virtual void | SetOutputFlag (flag f=flag(1)) |
| Public Member Functions inherited from Joint | |
| Joint (unsigned int uL, const DofOwner *pD, flag fOut) | |
| virtual | ~Joint (void) |
| virtual Elem::Type | GetElemType (void) const |
| std::ostream & | Output (std::ostream &out, const char *sJointName, unsigned int uLabel, const Vec3 &FLocal, const Vec3 &MLocal, const Vec3 &FGlobal, const Vec3 &MGlobal) const |
| virtual void | SetInitialValue (VectorHandler &) |
| bool | bIsPrescribedMotion (void) const |
| bool | bIsTorque (void) const |
| Public Member Functions inherited from ElemGravityOwner | |
| ElemGravityOwner (unsigned int uL, flag fOut) | |
| virtual | ~ElemGravityOwner (void) |
| virtual doublereal | dGetM (void) const |
| Vec3 | GetS (void) const |
| Mat3x3 | GetJ (void) const |
| Vec3 | GetB (void) const |
| Vec3 | GetG (void) const |
| Public Member Functions inherited from GravityOwner | |
| GravityOwner (void) | |
| virtual | ~GravityOwner (void) |
| void | PutGravity (const Gravity *pG) |
| virtual bool | bGetGravity (const Vec3 &X, Vec3 &Acc) const |
| Public Member Functions inherited from ElemWithDofs | |
| ElemWithDofs (unsigned int uL, const DofOwner *pDO, flag fOut) | |
| virtual | ~ElemWithDofs (void) |
| Public Member Functions inherited from DofOwnerOwner | |
| DofOwnerOwner (const DofOwner *pDO) | |
| virtual | ~DofOwnerOwner () |
| virtual const DofOwner * | pGetDofOwner (void) const |
| virtual integer | iGetFirstIndex (void) const |
| Public Member Functions inherited from InitialAssemblyElem | |
| InitialAssemblyElem (unsigned int uL, flag fOut) | |
| virtual | ~InitialAssemblyElem (void) |
| Public Member Functions inherited from SubjectToInitialAssembly | |
| SubjectToInitialAssembly (void) | |
| virtual | ~SubjectToInitialAssembly (void) |
Private Attributes | |
| const StructNode * | pNode |
| Vec3 | Xc |
| Mat3x3 | Rch |
| Mat3x3 | Rchr |
| Vec3 | tilde_fn |
| Mat3x3 | tilde_Rnh |
| Mat3x3 | tilde_Rnhr |
| bool | bPosActive [3] |
| bool | bRotActive [3] |
| bool | bVelActive [3] |
| bool | bAgvActive [3] |
| Mat3x3 | RchT |
| Vec3 | tilde_Xc |
| Mat3x3 | RchrT |
| TplDriveOwner< Vec3 > | XDrv |
| TplDriveOwner< Vec3 > | XPDrv |
| TplDriveOwner< Vec3 > | XPPDrv |
| TplDriveOwner< Vec3 > | ThetaDrv |
| TplDriveOwner< Vec3 > | OmegaDrv |
| TplDriveOwner< Vec3 > | OmegaPDrv |
| unsigned int | nConstraints |
| unsigned int | nPosConstraints |
| unsigned int | nRotConstraints |
| unsigned int | nVelConstraints |
| unsigned int | nAgvConstraints |
| unsigned int | iPosIncid [3] |
| unsigned int | iRotIncid [3] |
| unsigned int | iVelIncid [3] |
| unsigned int | iAgvIncid [3] |
| unsigned int | iPosEqIndex [3] |
| unsigned int | iRotEqIndex [3] |
| unsigned int | iVelEqIndex [3] |
| unsigned int | iAgvEqIndex [3] |
| Vec3 | M |
| Vec3 | F |
| Vec3 | ThetaDelta |
| Vec3 | ThetaDeltaPrev |
| Vec3 | ThetaDeltaRemnant |
| Vec3 | ThetaDeltaTrue |
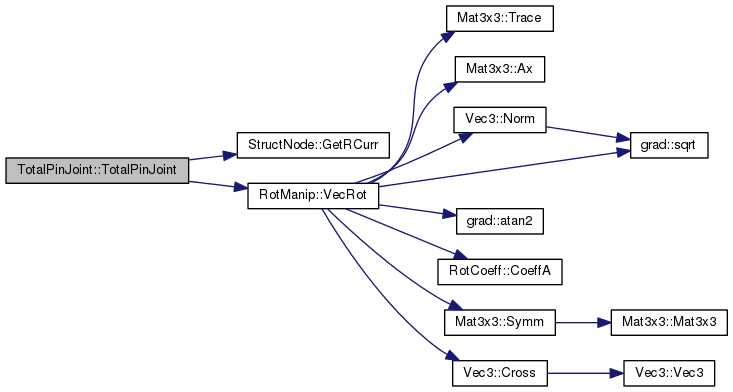
| TotalPinJoint::TotalPinJoint | ( | unsigned int | uL, |
| const DofOwner * | pDO, | ||
| bool | bPos[3], | ||
| bool | bVel[3], | ||
| TplDriveCaller< Vec3 > *const | pDCPos[3], | ||
| bool | bRot[3], | ||
| bool | bAgv[3], | ||
| TplDriveCaller< Vec3 > *const | pDCRot[3], | ||
| const Vec3 & | XcTmp, | ||
| const Mat3x3 & | RchTmp, | ||
| const Mat3x3 & | RchrTmp, | ||
| const StructNode * | pN, | ||
| const Vec3 & | fnTmp, | ||
| const Mat3x3 & | RnhTmp, | ||
| const Mat3x3 & | RnhrTmp, | ||
| flag | fOut | ||
| ) |
Definition at line 2075 of file totalj.cc.
References ASSERT, bAgvActive, bPosActive, bRotActive, bVelActive, StructNode::GetRCurr(), iAgvEqIndex, iAgvIncid, iPosEqIndex, iPosIncid, iRotEqIndex, iRotIncid, iVelEqIndex, iVelIncid, MBDYN_EXCEPT_ARGS, nAgvConstraints, nConstraints, nPosConstraints, nRotConstraints, nVelConstraints, pNode, RchT, ThetaDeltaTrue, tilde_Rnhr, and RotManip::VecRot().
| TotalPinJoint::~TotalPinJoint | ( | void | ) |
|
virtual |
Reimplemented from SimulationEntity.
Definition at line 2744 of file totalj.cc.
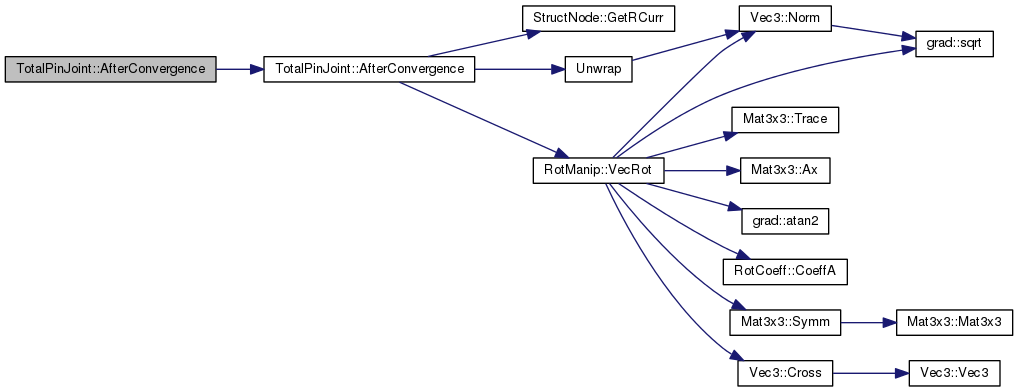
References StructNode::GetRCurr(), iRotIncid, nRotConstraints, pNode, RchT, ThetaDelta, ThetaDeltaPrev, ThetaDeltaRemnant, ThetaDeltaTrue, tilde_Rnhr, Unwrap(), and RotManip::VecRot().
Referenced by AfterConvergence().
|
virtual |
Reimplemented from SimulationEntity.
Definition at line 2765 of file totalj.cc.
References AfterConvergence().
|
virtual |
Implements Elem.
Definition at line 2850 of file totalj.cc.
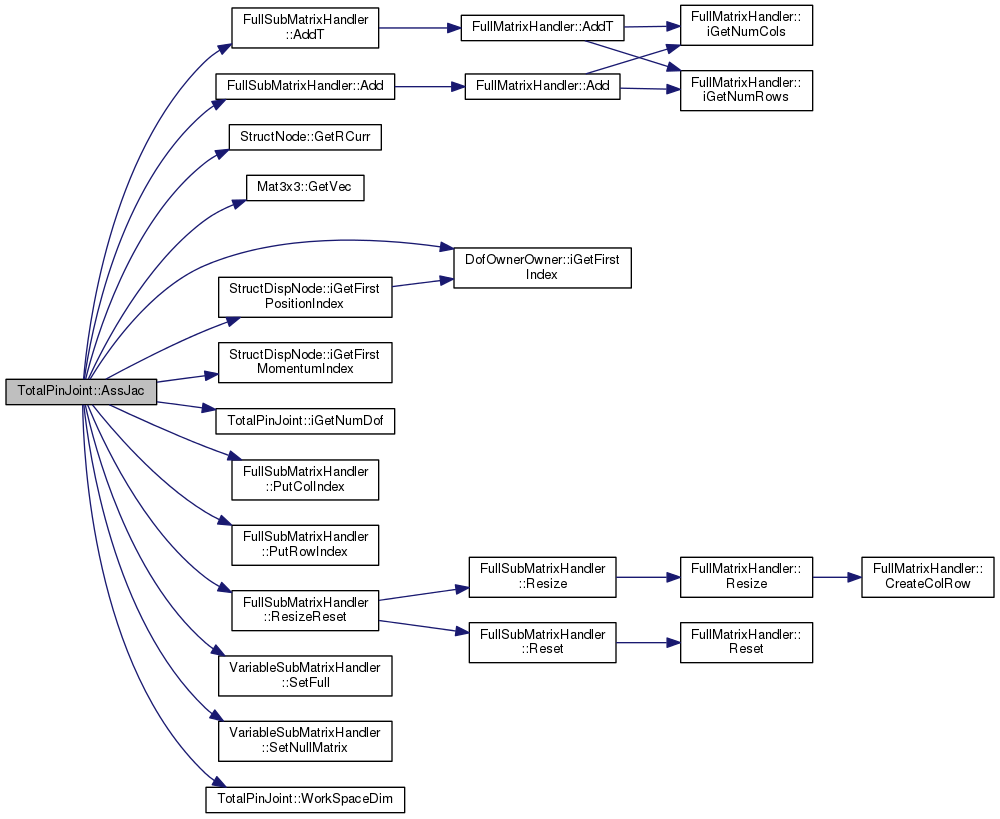
References FullSubMatrixHandler::Add(), FullSubMatrixHandler::AddT(), DEBUGCOUT, F, StructNode::GetRCurr(), Mat3x3::GetVec(), DofOwnerOwner::iGetFirstIndex(), StructDispNode::iGetFirstMomentumIndex(), StructDispNode::iGetFirstPositionIndex(), iGetNumDof(), iPosIncid, iRotIncid, MatCrossCross, nConstraints, nPosConstraints, nRotConstraints, pNode, FullSubMatrixHandler::PutColIndex(), FullSubMatrixHandler::PutRowIndex(), Rch, Rchr, FullSubMatrixHandler::ResizeReset(), VariableSubMatrixHandler::SetFull(), VariableSubMatrixHandler::SetNullMatrix(), tilde_fn, and WorkSpaceDim().
|
virtual |
Reimplemented from Elem.
Definition at line 3068 of file totalj.cc.
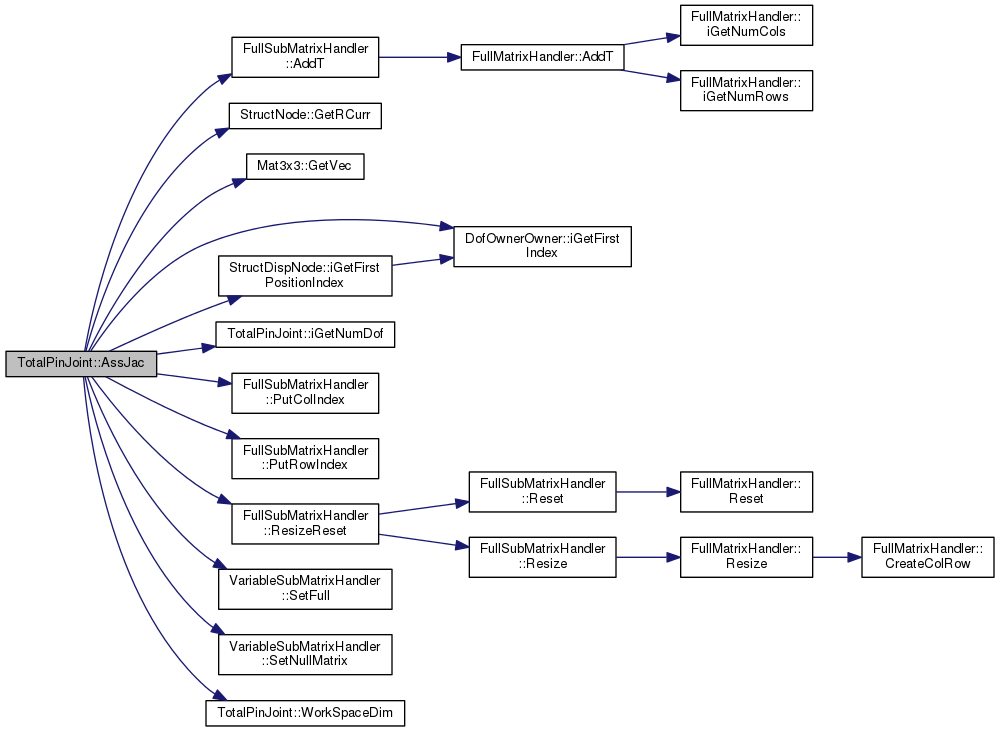
References FullSubMatrixHandler::AddT(), DEBUGCOUT, StructNode::GetRCurr(), Mat3x3::GetVec(), DofOwnerOwner::iGetFirstIndex(), StructDispNode::iGetFirstPositionIndex(), iGetNumDof(), iPosIncid, iRotIncid, nConstraints, nPosConstraints, nRotConstraints, pNode, FullSubMatrixHandler::PutColIndex(), FullSubMatrixHandler::PutRowIndex(), Rch, Rchr, FullSubMatrixHandler::ResizeReset(), VariableSubMatrixHandler::SetFull(), VariableSubMatrixHandler::SetNullMatrix(), tilde_fn, and WorkSpaceDim().
|
virtual |
Implements Elem.
Definition at line 2936 of file totalj.cc.
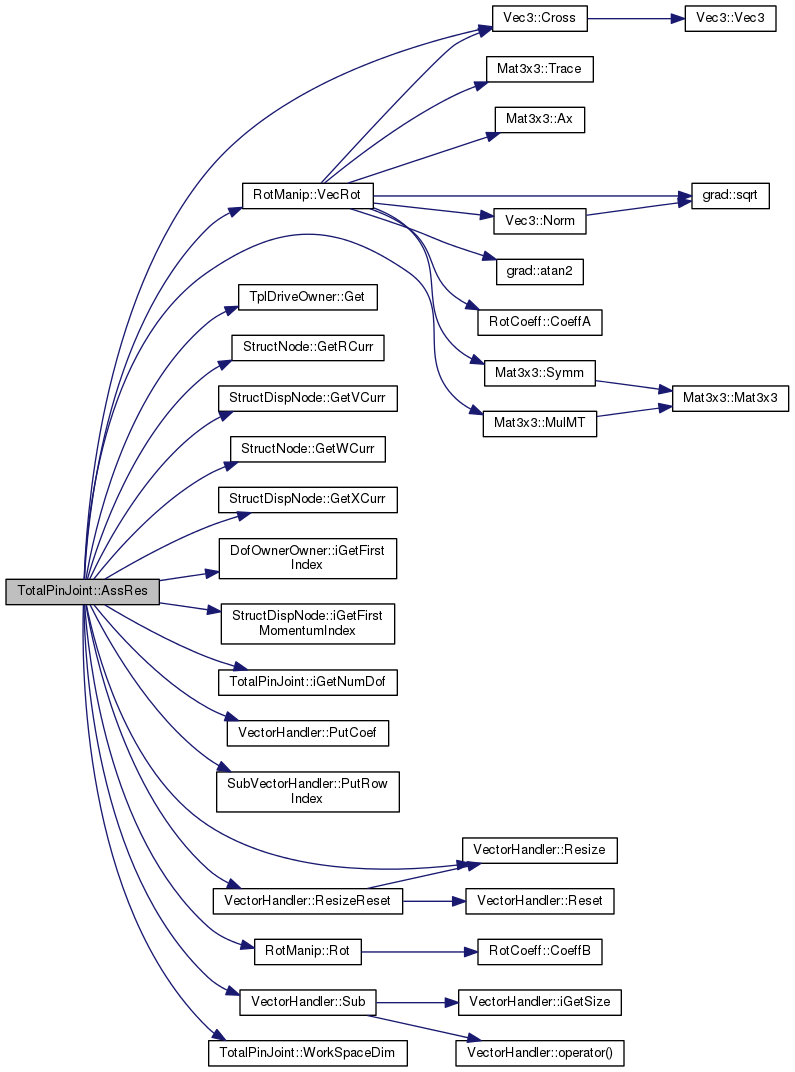
References ASSERT, Vec3::Cross(), DEBUGCOUT, F, TplDriveOwner< T >::Get(), StructNode::GetRCurr(), StructDispNode::GetVCurr(), StructNode::GetWCurr(), StructDispNode::GetXCurr(), iAgvEqIndex, iAgvIncid, DofOwnerOwner::iGetFirstIndex(), StructDispNode::iGetFirstMomentumIndex(), iGetNumDof(), iPosEqIndex, iPosIncid, iRotEqIndex, iRotIncid, iVelEqIndex, iVelIncid, M, Mat3x3::MulMT(), nAgvConstraints, nConstraints, nPosConstraints, nRotConstraints, nVelConstraints, pNode, VectorHandler::PutCoef(), SubVectorHandler::PutRowIndex(), Rch, Rchr, RchrT, RchT, VectorHandler::Resize(), VectorHandler::ResizeReset(), RotManip::Rot(), VectorHandler::Sub(), ThetaDelta, ThetaDeltaRemnant, ThetaDrv, tilde_fn, tilde_Rnhr, tilde_Xc, RotManip::VecRot(), WorkSpaceDim(), and XDrv.
|
virtual |
Reimplemented from Elem.
Definition at line 3130 of file totalj.cc.
References InverseDynamics::ACCELERATION, ASSERT, Vec3::Cross(), DEBUGCOUT, TplDriveOwner< T >::Get(), StructNode::GetRCurr(), StructNode::GetWCurr(), StructDispNode::GetXCurr(), DofOwnerOwner::iGetFirstIndex(), iGetNumDof(), InverseDynamics::INVERSE_DYNAMICS, iPosEqIndex, iPosIncid, iRotEqIndex, iRotIncid, MBDYN_EXCEPT_ARGS, Mat3x3::MulMT(), Mat3x3::MulTV(), nConstraints, nPosConstraints, nRotConstraints, OmegaDrv, OmegaPDrv, pNode, InverseDynamics::POSITION, VectorHandler::PutCoef(), SubVectorHandler::PutRowIndex(), RchrT, RchT, VectorHandler::ResizeReset(), RotManip::Rot(), ThetaDelta, ThetaDeltaRemnant, ThetaDrv, tilde_fn, tilde_Rnhr, tilde_Xc, RotManip::VecRot(), InverseDynamics::VELOCITY, WorkSpaceDim(), XDrv, XPDrv, and XPPDrv.
|
virtual |
|
virtual |
Reimplemented from Elem.
Definition at line 2208 of file totalj.cc.
References bAgvActive, bPosActive, bRotActive, bVelActive, idx2xyz, DofOwnerOwner::iGetFirstIndex(), nAgvConstraints, nConstraints, nPosConstraints, nRotConstraints, and nVelConstraints.

|
virtual |
Reimplemented from Elem.
Definition at line 2302 of file totalj.cc.
References ASSERT, bAgvActive, bPosActive, bRotActive, bVelActive, WithLabel::GetLabel(), idx2xyz, iGetInitialNumDof(), iGetNumDof(), nAgvConstraints, nPosConstraints, nRotConstraints, and nVelConstraints.
|
virtual |
Reimplemented from Elem.
Definition at line 2382 of file totalj.cc.
References bAgvActive, bPosActive, bRotActive, bVelActive, idx2xyz, DofOwnerOwner::iGetFirstIndex(), nAgvConstraints, nConstraints, nPosConstraints, nRotConstraints, and nVelConstraints.

|
virtual |
Reimplemented from Elem.
Definition at line 2487 of file totalj.cc.
References ASSERT, bAgvActive, bPosActive, bRotActive, bVelActive, WithLabel::GetLabel(), idx2xyz, iGetInitialNumDof(), iGetNumDof(), nAgvConstraints, nPosConstraints, nRotConstraints, and nVelConstraints.
|
virtual |
Reimplemented from SimulationEntity.
Definition at line 3675 of file totalj.cc.
References ASSERT, bPosActive, bRotActive, Vec3::Cross(), F, TplDriveOwner< T >::Get(), StructNode::GetRCurr(), StructDispNode::GetVCurr(), StructNode::GetWCurr(), StructDispNode::GetXCurr(), M, pNode, RchrT, RchT, ThetaDeltaTrue, ThetaDrv, tilde_fn, tilde_Rnhr, tilde_Xc, Unwrap(), RotManip::VecRot(), and XDrv.
|
inlinevirtual |
|
inlinevirtual |
Reimplemented from Elem.
Definition at line 367 of file totalj.h.
References DofOrder::ALGEBRAIC, ASSERT, and nConstraints.
|
virtual |
Reimplemented from SimulationEntity.
Definition at line 3284 of file totalj.cc.
References DofOrder::ALGEBRAIC, ASSERTMSGBREAK, and iGetNumDof().

|
inlinevirtual |
|
inlinevirtual |
Implements SubjectToInitialAssembly.
Definition at line 434 of file totalj.h.
References nConstraints.
Referenced by DescribeDof(), DescribeEq(), InitialAssJac(), and InitialAssRes().
|
inlinevirtual |
Reimplemented from Elem.
Definition at line 342 of file totalj.h.
References nConstraints.
Referenced by AssJac(), AssRes(), DescribeDof(), DescribeEq(), and GetEqType().
|
virtual |
Reimplemented from SimulationEntity.
|
virtual |
|
virtual |
Implements SubjectToInitialAssembly.
Definition at line 3367 of file totalj.cc.
References FullSubMatrixHandler::Add(), FullSubMatrixHandler::AddT(), Vec3::Cross(), F, StructNode::GetRCurr(), StructDispNode::GetVCurr(), Mat3x3::GetVec(), StructNode::GetWCurr(), DofOwnerOwner::iGetFirstIndex(), StructDispNode::iGetFirstPositionIndex(), iGetInitialNumDof(), InitialWorkSpaceDim(), iPosIncid, iRotIncid, MatCrossCross, nConstraints, nPosConstraints, nRotConstraints, pNode, FullSubMatrixHandler::PutColIndex(), FullSubMatrixHandler::PutRowIndex(), Rch, Rchr, FullSubMatrixHandler::ResizeReset(), VariableSubMatrixHandler::SetFull(), VariableSubMatrixHandler::SetNullMatrix(), tilde_fn, and Zero3.
|
virtual |
Implements SubjectToInitialAssembly.
Definition at line 3501 of file totalj.cc.
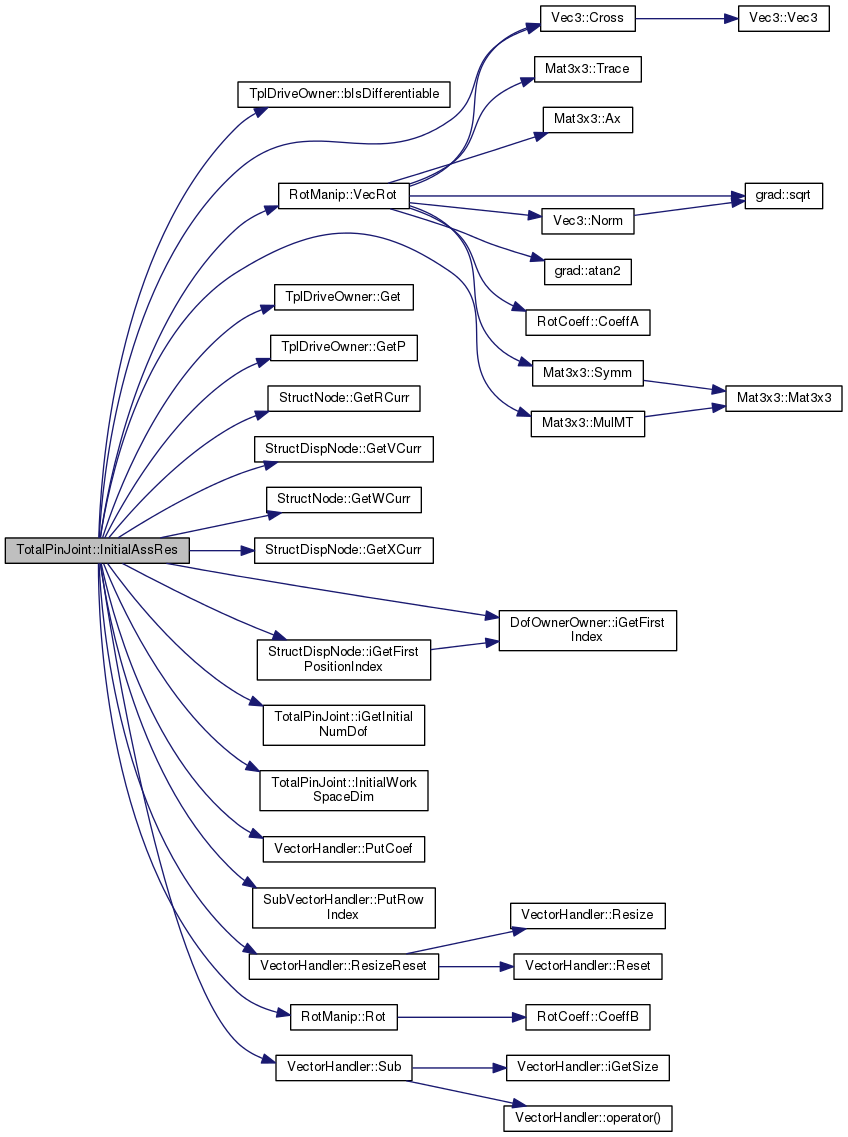
References TplDriveOwner< T >::bIsDifferentiable(), Vec3::Cross(), DEBUGCOUT, F, TplDriveOwner< T >::Get(), TplDriveOwner< T >::GetP(), StructNode::GetRCurr(), StructDispNode::GetVCurr(), StructNode::GetWCurr(), StructDispNode::GetXCurr(), DofOwnerOwner::iGetFirstIndex(), StructDispNode::iGetFirstPositionIndex(), iGetInitialNumDof(), InitialWorkSpaceDim(), iPosIncid, iRotIncid, M, Mat3x3::MulMT(), nConstraints, nPosConstraints, nRotConstraints, pNode, VectorHandler::PutCoef(), SubVectorHandler::PutRowIndex(), Rch, Rchr, RchrT, RchT, VectorHandler::ResizeReset(), RotManip::Rot(), VectorHandler::Sub(), ThetaDelta, ThetaDrv, tilde_fn, tilde_Rnhr, tilde_Xc, RotManip::VecRot(), XDrv, and Zero3.
|
inlinevirtual |
Implements SubjectToInitialAssembly.
Definition at line 438 of file totalj.h.
References nConstraints.
Referenced by InitialAssJac(), and InitialAssRes().
|
virtual |
Reimplemented from ToBeOutput.
Definition at line 3319 of file totalj.cc.
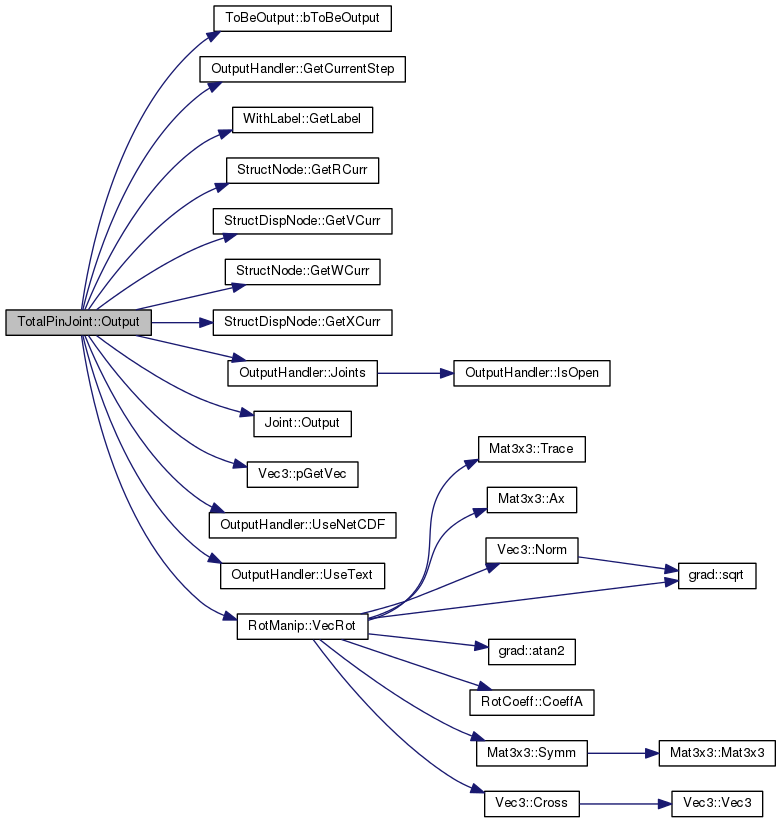
References ToBeOutput::bToBeOutput(), F, OutputHandler::GetCurrentStep(), WithLabel::GetLabel(), StructNode::GetRCurr(), StructDispNode::GetVCurr(), StructNode::GetWCurr(), StructDispNode::GetXCurr(), OutputHandler::JOINTS, OutputHandler::Joints(), M, Joint::Output(), Vec3::pGetVec(), pNode, Rch, Rchr, RchrT, RchT, tilde_fn, tilde_Rnhr, tilde_Xc, OutputHandler::UseNetCDF(), OutputHandler::UseText(), and RotManip::VecRot().
|
virtual |
Reimplemented from ToBeOutput.
Definition at line 3293 of file totalj.cc.
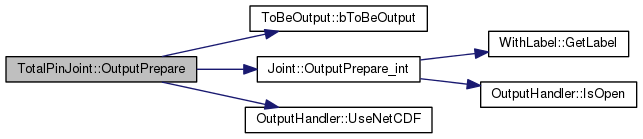
References ToBeOutput::bToBeOutput(), OutputHandler::JOINTS, ORIENTATION_VECTOR, Joint::OutputPrepare_int(), and OutputHandler::UseNetCDF().
|
virtual |
Reimplemented from SimulationEntity.
Definition at line 2667 of file totalj.cc.
References STRLENOF.
|
virtual |
Implements Elem.
Definition at line 2774 of file totalj.cc.
References bAgvActive, bPosActive, bRotActive, bVelActive, WithLabel::GetLabel(), Mat3x3::GetVec(), OmegaDrv, OmegaPDrv, TplDriveOwner< T >::pGetDriveCaller(), pNode, Rch, Rchr, TplDriveCaller< T >::Restart(), Joint::Restart(), ThetaDrv, tilde_fn, tilde_Rnh, tilde_Rnhr, Vec3::Write(), Xc, XDrv, XPDrv, and XPPDrv.
|
virtual |
Reimplemented from Joint.
Definition at line 2581 of file totalj.cc.
References TplDriveOwner< T >::Get(), StructNode::GetRCurr(), StructDispNode::GetXCurr(), MBDYN_EXCEPT_ARGS, Mat3x3::MulTM(), OmegaDrv, OmegaPDrv, pNode, Joint::JointDriveHint< T >::pTDH, Rch, Rchr, RchrT, RchT, RotManip::Rot(), TplDriveOwner< T >::Set(), ThetaDrv, tilde_fn, tilde_Rnh, tilde_Rnhr, tilde_Xc, Mat3x3::Transpose(), WithLabel::uLabel, Xc, XDrv, XPDrv, and XPPDrv.
|
virtual |
Reimplemented from Joint.
Definition at line 3267 of file totalj.cc.
References ASSERT, F, DofOwnerOwner::iGetFirstIndex(), InverseDynamics::INVERSE_DYNAMICS, iPosEqIndex, iPosIncid, iRotEqIndex, iRotIncid, M, nPosConstraints, and nRotConstraints.

|
private |
Definition at line 272 of file totalj.h.
Referenced by DescribeDof(), DescribeEq(), Restart(), and TotalPinJoint().
|
private |
Definition at line 269 of file totalj.h.
Referenced by DescribeDof(), DescribeEq(), dGetPrivData(), Restart(), and TotalPinJoint().
|
private |
Definition at line 270 of file totalj.h.
Referenced by DescribeDof(), DescribeEq(), dGetPrivData(), Restart(), and TotalPinJoint().
|
private |
Definition at line 271 of file totalj.h.
Referenced by DescribeDof(), DescribeEq(), Restart(), and TotalPinJoint().
|
mutableprivate |
Definition at line 310 of file totalj.h.
Referenced by AssJac(), AssRes(), dGetPrivData(), InitialAssJac(), InitialAssRes(), Output(), and Update().
|
private |
Definition at line 300 of file totalj.h.
Referenced by AssRes(), and TotalPinJoint().
|
private |
Definition at line 295 of file totalj.h.
Referenced by AssRes(), and TotalPinJoint().
|
private |
Definition at line 297 of file totalj.h.
Referenced by AssRes(), TotalPinJoint(), and Update().
|
private |
Definition at line 292 of file totalj.h.
Referenced by AssJac(), AssRes(), InitialAssJac(), InitialAssRes(), TotalPinJoint(), and Update().
|
private |
Definition at line 298 of file totalj.h.
Referenced by AssRes(), TotalPinJoint(), and Update().
|
private |
Definition at line 293 of file totalj.h.
Referenced by AfterConvergence(), AssJac(), AssRes(), InitialAssJac(), InitialAssRes(), TotalPinJoint(), and Update().
|
private |
Definition at line 299 of file totalj.h.
Referenced by AssRes(), and TotalPinJoint().
|
private |
Definition at line 294 of file totalj.h.
Referenced by AssRes(), and TotalPinJoint().
|
mutableprivate |
Definition at line 309 of file totalj.h.
Referenced by AssRes(), dGetPrivData(), InitialAssRes(), Output(), and Update().
|
private |
Definition at line 290 of file totalj.h.
Referenced by AssRes(), DescribeDof(), DescribeEq(), and TotalPinJoint().
|
private |
Definition at line 286 of file totalj.h.
Referenced by AssJac(), AssRes(), DescribeDof(), DescribeEq(), GetDofType(), iGetInitialNumDof(), iGetNumDof(), InitialAssJac(), InitialAssRes(), InitialWorkSpaceDim(), TotalPinJoint(), and WorkSpaceDim().
|
private |
Definition at line 287 of file totalj.h.
Referenced by AssJac(), AssRes(), DescribeDof(), DescribeEq(), InitialAssJac(), InitialAssRes(), TotalPinJoint(), and Update().
|
private |
Definition at line 288 of file totalj.h.
Referenced by AfterConvergence(), AssJac(), AssRes(), DescribeDof(), DescribeEq(), InitialAssJac(), InitialAssRes(), TotalPinJoint(), and Update().
|
private |
Definition at line 289 of file totalj.h.
Referenced by AssRes(), DescribeDof(), DescribeEq(), and TotalPinJoint().
|
private |
Definition at line 283 of file totalj.h.
Referenced by AssRes(), Restart(), and SetValue().
|
private |
Definition at line 284 of file totalj.h.
Referenced by AssRes(), Restart(), and SetValue().
|
private |
Definition at line 262 of file totalj.h.
Referenced by AfterConvergence(), AssJac(), AssRes(), dGetPrivData(), GetConnectedNodes(), InitialAssJac(), InitialAssRes(), Output(), Restart(), SetValue(), and TotalPinJoint().
|
private |
Definition at line 264 of file totalj.h.
Referenced by AssJac(), AssRes(), InitialAssJac(), InitialAssRes(), Output(), Restart(), and SetValue().
|
private |
Definition at line 265 of file totalj.h.
Referenced by AssJac(), AssRes(), InitialAssJac(), InitialAssRes(), Output(), Restart(), and SetValue().
|
private |
Definition at line 276 of file totalj.h.
Referenced by AssRes(), dGetPrivData(), InitialAssRes(), Output(), and SetValue().
|
private |
Definition at line 274 of file totalj.h.
Referenced by AfterConvergence(), AssRes(), dGetPrivData(), InitialAssRes(), Output(), SetValue(), and TotalPinJoint().
|
mutableprivate |
Definition at line 311 of file totalj.h.
Referenced by AfterConvergence(), AssRes(), and InitialAssRes().
|
mutableprivate |
Definition at line 312 of file totalj.h.
Referenced by AfterConvergence().
|
private |
Definition at line 314 of file totalj.h.
Referenced by AfterConvergence(), and AssRes().
|
private |
Definition at line 315 of file totalj.h.
Referenced by AfterConvergence(), dGetPrivData(), and TotalPinJoint().
|
private |
Definition at line 282 of file totalj.h.
Referenced by AssRes(), dGetPrivData(), InitialAssRes(), Restart(), and SetValue().
|
private |
Definition at line 266 of file totalj.h.
Referenced by AssJac(), AssRes(), dGetPrivData(), InitialAssJac(), InitialAssRes(), Output(), Restart(), and SetValue().
|
private |
Definition at line 267 of file totalj.h.
Referenced by Restart(), and SetValue().
|
private |
Definition at line 268 of file totalj.h.
Referenced by AfterConvergence(), AssRes(), dGetPrivData(), InitialAssRes(), Output(), Restart(), SetValue(), and TotalPinJoint().
|
private |
Definition at line 275 of file totalj.h.
Referenced by AssRes(), dGetPrivData(), InitialAssRes(), Output(), and SetValue().
|
private |
Definition at line 263 of file totalj.h.
Referenced by Restart(), and SetValue().
|
private |
Definition at line 278 of file totalj.h.
Referenced by AssRes(), dGetPrivData(), InitialAssRes(), Restart(), and SetValue().
|
private |
Definition at line 279 of file totalj.h.
Referenced by AssRes(), Restart(), and SetValue().
|
private |
Definition at line 280 of file totalj.h.
Referenced by AssRes(), Restart(), and SetValue().
 1.8.7
1.8.7 
