|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
Go to the source code of this file.
Classes | |
| class | VariableBody |
| class | DynamicVariableBody |
| class | StaticVariableBody |
Functions | |
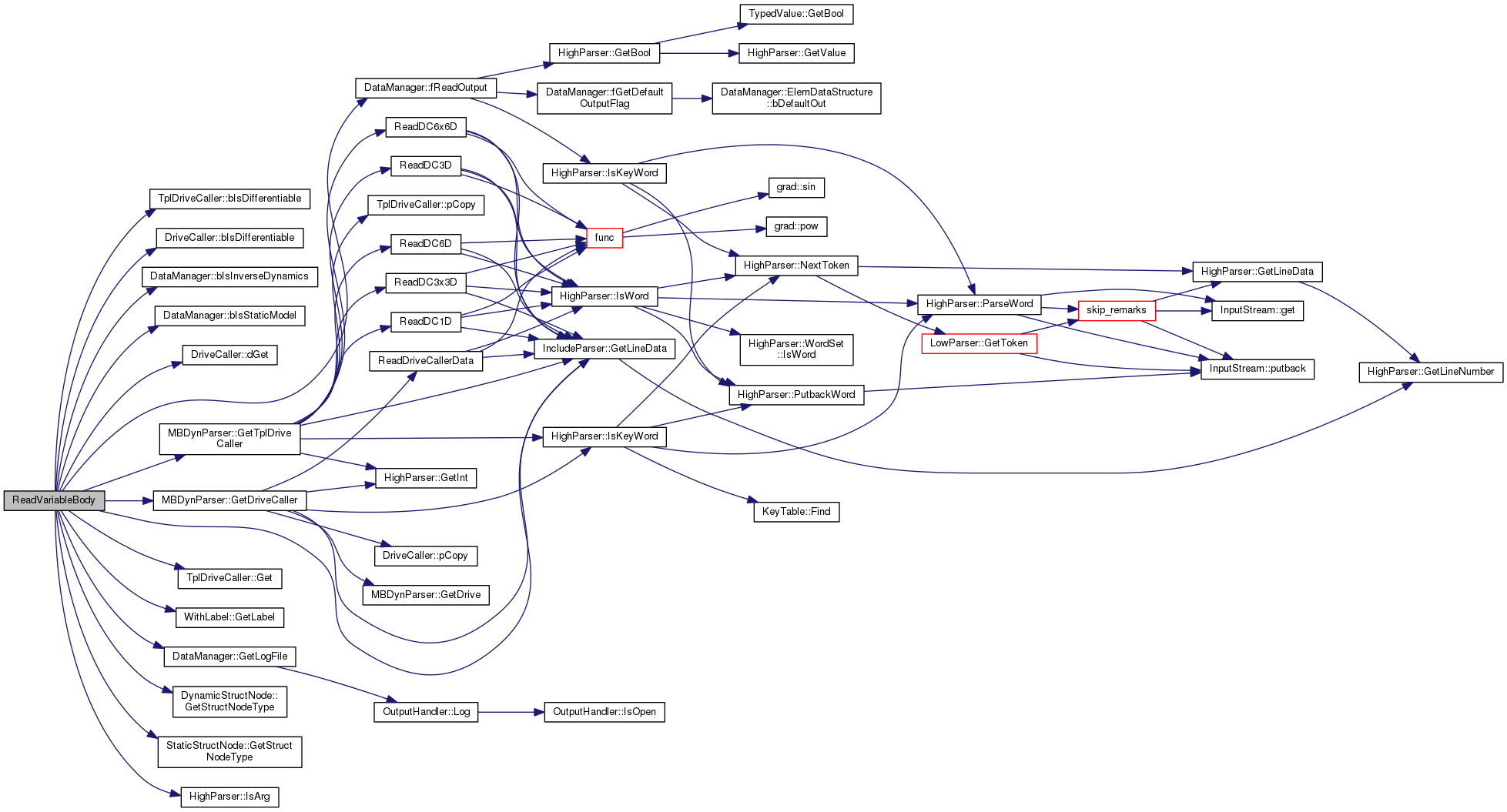
| Elem * | ReadVariableBody (DataManager *pDM, MBDynParser &HP, unsigned int uLabel, const StructNode *pStrNode) |
| Elem* ReadVariableBody | ( | DataManager * | pDM, |
| MBDynParser & | HP, | ||
| unsigned int | uLabel, | ||
| const StructNode * | pStrNode | ||
| ) |
Definition at line 1022 of file body_vm.cc.
References TplDriveCaller< T >::bIsDifferentiable(), DriveCaller::bIsDifferentiable(), DataManager::bIsInverseDynamics(), DataManager::bIsStaticModel(), Elem::BODY, DEBUGCOUTFNAME, DriveCaller::dGet(), StructNode::DYNAMIC, DataManager::fReadOutput(), TplDriveCaller< T >::Get(), MBDynParser::GetDriveCaller(), WithLabel::GetLabel(), IncludeParser::GetLineData(), DataManager::GetLogFile(), DynamicStructNode::GetStructNodeType(), StaticStructNode::GetStructNodeType(), MBDynParser::GetTplDriveCaller(), HighParser::IsArg(), MBDYN_EXCEPT_ARGS, MBDynParser::RF, SAFENEWWITHCONSTRUCTOR, and StructNode::STATIC.
Referenced by ReadBody().
 1.8.7
1.8.7 
