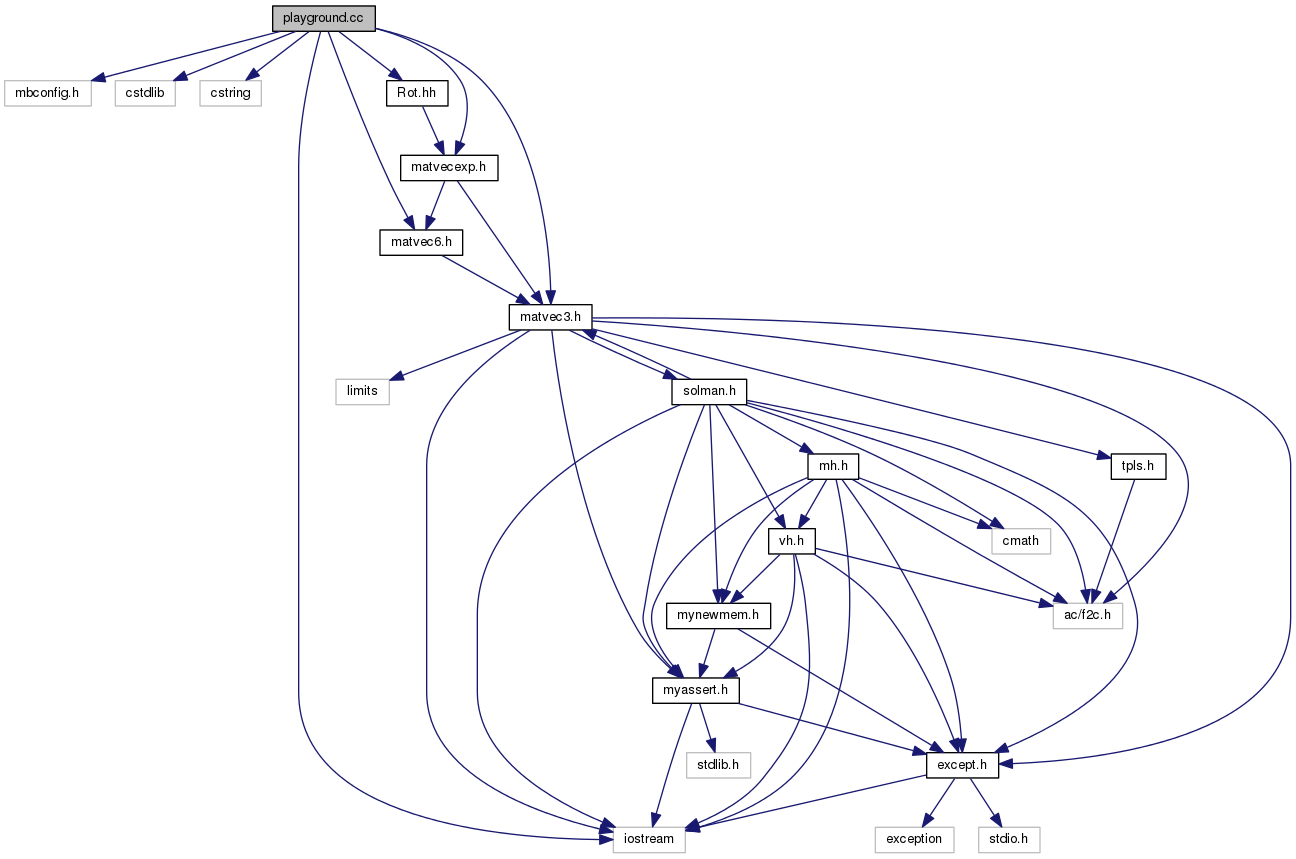
#include "mbconfig.h"
#include <cstdlib>
#include <cstring>
#include <iostream>
#include "matvec3.h"
#include "matvec6.h"
#include "matvecexp.h"
#include "Rot.hh"
Go to the source code of this file.
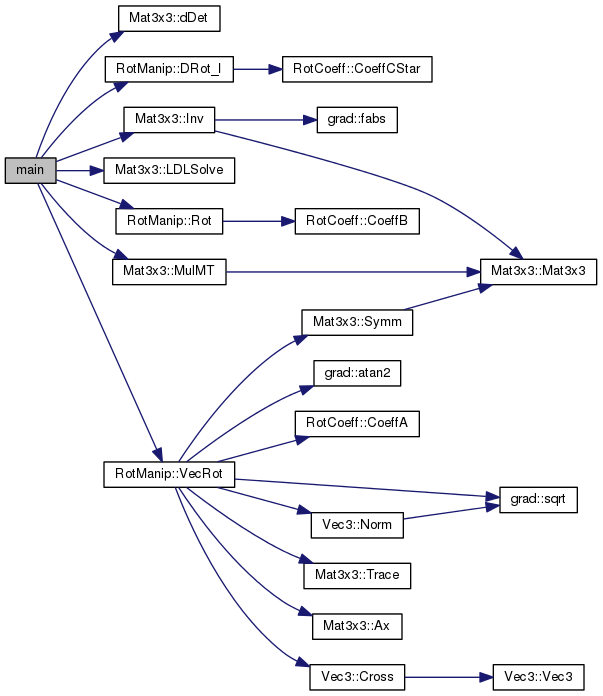
| int main |
( |
int |
argn, |
|
|
const char *const |
argv[] |
|
) |
| |
Definition at line 43 of file playground.cc.
References Mat3x3::dDet(), RotManip::DRot_I(), Mat3x3::Inv(), Mat3x3::LDLSolve(), Mat3x3::MulMT(), R, RotManip::Rot(), and RotManip::VecRot().
49 std::cin >> d[1] >> d[2];
55 std::cout <<
"Gamma=" << Gamma <<
" det(Gamma)=" << dDet << std::endl;
62 std::cout <<
"R={" <<
R <<
"}" << std::endl
63 <<
" V={" << Theta <<
"}" << std::endl
64 <<
" R={" << Rcheck <<
"}" << std::endl
65 <<
" I={" <<
R.
MulMT(Rcheck) <<
"}"
69 std::cin >> d[3] >> d[4] >> d[5] >> d[6] >> d[7] >> d[8];
70 Mat3x3 M(d[0], d[1], d[2], d[3], d[4], d[5], d[6], d[7], d[8]);
72 std::cin >> b[0] >> b[1] >> b[2];
73 Vec3 x = M.LDLSolve(
Vec3(b[0], b[1], b[2]));
74 std::cout << x << std::endl;
Vec3 VecRot(const Mat3x3 &Phi)
Mat3x3 Inv(const doublereal &ddet) const
doublereal dDet(void) const
Mat3x3 Rot(const Vec3 &phi)
Mat3x3 MulMT(const Mat3x3 &m) const
Mat3x3 DRot_I(const Vec3 &phi)
 1.8.7
1.8.7 
