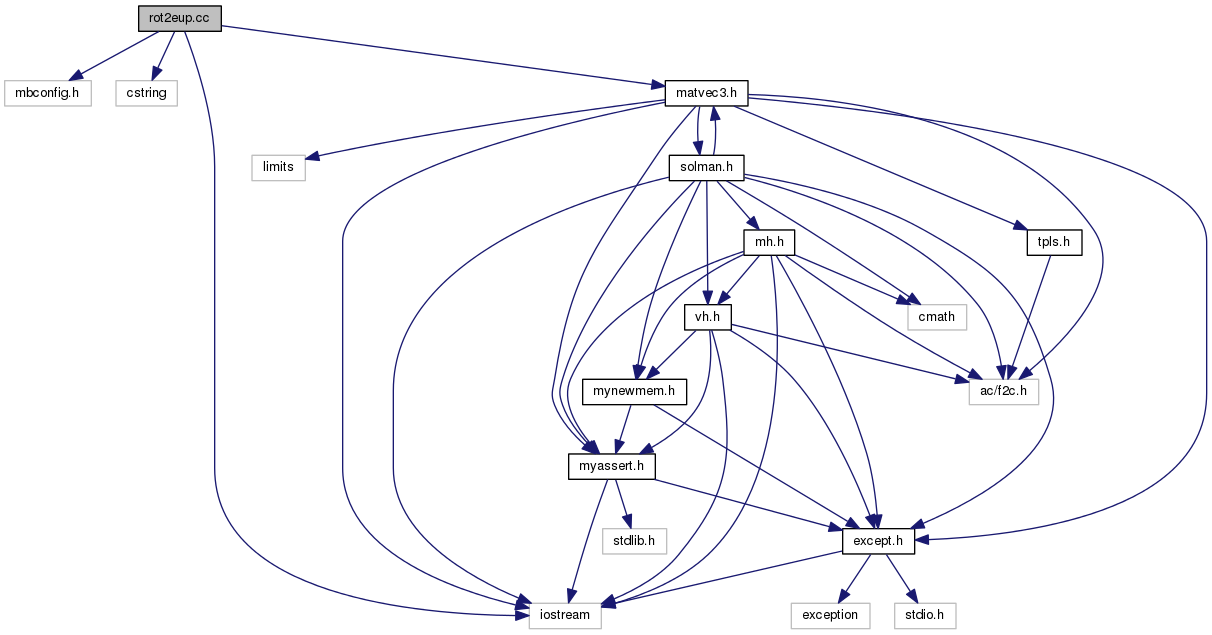
#include "mbconfig.h"
#include <cstring>
#include <iostream>
#include "matvec3.h"
Go to the source code of this file.
| int main |
( |
int |
argn, |
|
|
const char *const |
argv[] |
|
) |
| |
Definition at line 39 of file rot2eup.cc.
References MatR2EulerParams().
42 if (!strcasecmp(argv[1],
"-?")
43 || !strcasecmp(argv[1],
"-h")
44 || !strcasecmp(argv[1],
"--help")) {
45 std::cerr << std::endl <<
"usage: " << argv[0] << std::endl << std::endl
46 <<
" reads a rotation matrix (row-oriented) from stdin;" << std::endl
47 <<
" writes the Euler parameters on standard output" << std::endl << std::endl
48 <<
"part of MBDyn package (Copyright (C) Pierangelo Masarati, 1996)" << std::endl << std::endl;
59 std::cin >> d[3] >> d[6] >> d[1] >> d[4] >> d[7] >> d[2] >> d[5] >> d[8];
61 std::cout << e0 <<
" " << e << std::endl;
67 return (EXIT_SUCCESS);
void MatR2EulerParams(const Mat3x3 &R, doublereal &e0, Vec3 &e)

 1.8.7
1.8.7 
