|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
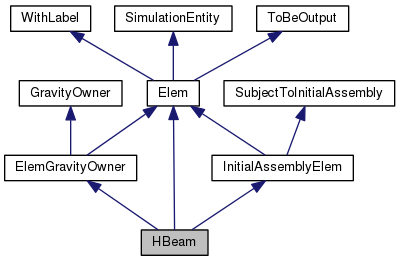
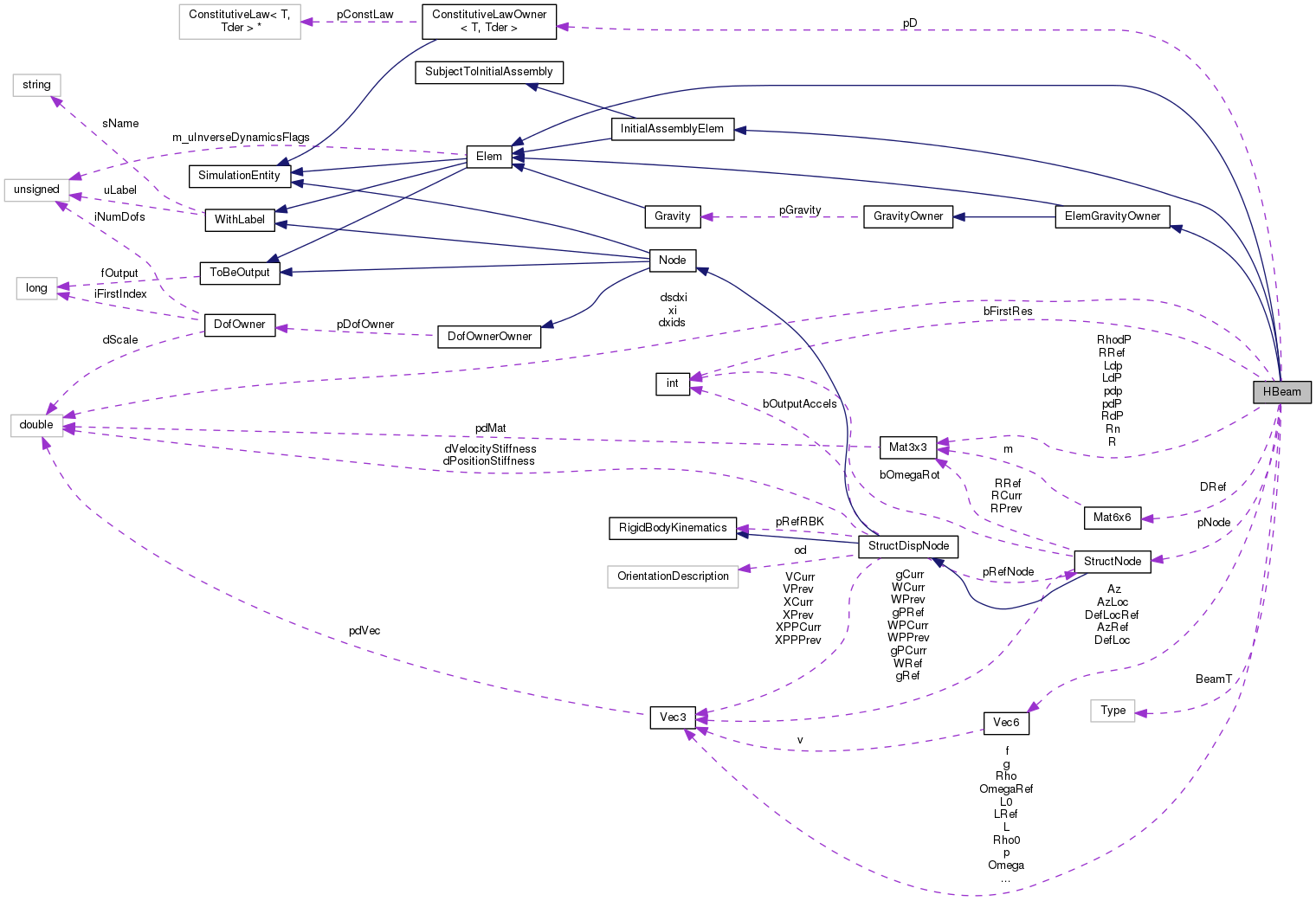
#include <hbeam.h>
Classes | |
| class | ErrGeneric |
Public Member Functions | |
| HBeam (unsigned int uL, const StructNode *pN1, const StructNode *pN2, const Vec3 &F1, const Vec3 &F2, const Mat3x3 &R1, const Mat3x3 &R2, const ConstitutiveLaw6D *pd, flag fOut) | |
| virtual | ~HBeam (void) |
| virtual Beam::Type | GetBeamType (void) const |
| virtual Elem::Type | GetElemType (void) const |
| virtual std::ostream & | Restart (std::ostream &out) const |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP) |
| virtual void | WorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| void | SetValue (DataManager *pDM, VectorHandler &, VectorHandler &, SimulationEntity::Hints *ph=0) |
| virtual void | AfterPredict (VectorHandler &, VectorHandler &) |
| virtual SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | Output (OutputHandler &OH) const |
| virtual unsigned int | iGetInitialNumDof (void) const |
| virtual void | InitialWorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| virtual void | SetInitialValue (VectorHandler &) |
| virtual VariableSubMatrixHandler & | InitialAssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| virtual SubVectorHandler & | InitialAssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr) |
| virtual unsigned int | iGetNumPrivData (void) const |
| virtual unsigned int | iGetPrivDataIdx (const char *s) const |
| virtual doublereal | dGetPrivData (unsigned int i) const |
| virtual const StructNode * | pGetNode (unsigned int i) const |
| virtual void | GetConnectedNodes (std::vector< const Node * > &connectedNodes) const |
 Public Member Functions inherited from Elem Public Member Functions inherited from Elem | |
| Elem (unsigned int uL, flag fOut) | |
| virtual | ~Elem (void) |
| virtual unsigned int | iGetNumDof (void) const |
| virtual std::ostream & | DescribeDof (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeDof (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual std::ostream & | DescribeEq (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeEq (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual DofOrder::Order | GetDofType (unsigned int) const |
| virtual void | AssMats (VariableSubMatrixHandler &WorkMatA, VariableSubMatrixHandler &WorkMatB, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual bool | bInverseDynamics (void) const |
| void | SetInverseDynamicsFlags (unsigned uIDF) |
| unsigned | GetInverseDynamicsFlags (void) const |
| bool | bIsErgonomy (void) const |
| bool | bIsRightHandSide (void) const |
| virtual VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| virtual SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr, const VectorHandler &XPrimePrimeCurr, InverseDynamics::Order iOrder=InverseDynamics::INVERSE_DYNAMICS) |
| virtual int | GetNumConnectedNodes (void) const |
| Public Member Functions inherited from WithLabel | |
| WithLabel (unsigned int uL=0, const std::string &sN="") | |
| virtual | ~WithLabel (void) |
| void | PutLabel (unsigned int uL) |
| void | PutName (const std::string &sN) |
| unsigned int | GetLabel (void) const |
| const std::string & | GetName (void) const |
| Public Member Functions inherited from SimulationEntity | |
| SimulationEntity (void) | |
| virtual | ~SimulationEntity (void) |
| virtual bool | bIsValidIndex (unsigned int i) const |
| virtual DofOrder::Order | GetEqType (unsigned int i) const |
| virtual Hint * | ParseHint (DataManager *pDM, const char *s) const |
| virtual void | BeforePredict (VectorHandler &, VectorHandler &, VectorHandler &, VectorHandler &) const |
| virtual void | Update (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | DerivativesUpdate (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | Update (const VectorHandler &XCurr, InverseDynamics::Order iOrder) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP, const VectorHandler &XPP) |
| virtual std::ostream & | OutputAppend (std::ostream &out) const |
| virtual void | ReadInitialState (MBDynParser &HP) |
| Public Member Functions inherited from ToBeOutput | |
| ToBeOutput (flag fOut=fDefaultOut) | |
| virtual | ~ToBeOutput (void) |
| virtual void | OutputPrepare (OutputHandler &OH) |
| virtual void | Output (OutputHandler &OH, const VectorHandler &X, const VectorHandler &XP) const |
| virtual flag | fToBeOutput (void) const |
| virtual bool | bToBeOutput (void) const |
| virtual void | SetOutputFlag (flag f=flag(1)) |
| Public Member Functions inherited from ElemGravityOwner | |
| ElemGravityOwner (unsigned int uL, flag fOut) | |
| virtual | ~ElemGravityOwner (void) |
| virtual doublereal | dGetM (void) const |
| Vec3 | GetS (void) const |
| Mat3x3 | GetJ (void) const |
| Vec3 | GetB (void) const |
| Vec3 | GetG (void) const |
| Public Member Functions inherited from GravityOwner | |
| GravityOwner (void) | |
| virtual | ~GravityOwner (void) |
| void | PutGravity (const Gravity *pG) |
| virtual bool | bGetGravity (const Vec3 &X, Vec3 &Acc) const |
| Public Member Functions inherited from InitialAssemblyElem | |
| InitialAssemblyElem (unsigned int uL, flag fOut) | |
| virtual | ~InitialAssemblyElem (void) |
| Public Member Functions inherited from SubjectToInitialAssembly | |
| SubjectToInitialAssembly (void) | |
| virtual | ~SubjectToInitialAssembly (void) |
Protected Types | |
| enum | NodeName { NODE1 = 0, NODE2 = 1, NUMNODES = 2 } |
| enum | Deformations { STRAIN = 0, CURVAT = 1, NUMDEFORM = 2 } |
Protected Member Functions | |
| virtual void | AssStiffnessMat (FullSubMatrixHandler &WMA, FullSubMatrixHandler &WMB, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | AssStiffnessVec (SubVectorHandler &WorkVec, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | AddInternalForces (Vec6 &) |
| virtual void | DsDxi (void) |
| virtual void | Omega0 (void) |
| void | SetBeamType (Beam::Type T) |
| virtual std::ostream & | Restart_ (std::ostream &out) const |
| Protected Member Functions inherited from ElemGravityOwner | |
| virtual Vec3 | GetS_int (void) const |
| virtual Mat3x3 | GetJ_int (void) const |
| virtual Vec3 | GetB_int (void) const |
| virtual Vec3 | GetG_int (void) const |
Protected Attributes | |
| const StructNode * | pNode [NUMNODES] |
| Vec3 | f [NUMNODES] |
| Vec3 | fRef [NUMNODES] |
| Mat3x3 | Rn [NUMNODES] |
| Mat3x3 | R |
| Mat3x3 | RRef |
| ConstitutiveLaw6DOwner * | pD |
| Mat6x6 | DRef |
| Vec3 | Omega |
| Vec3 | OmegaRef |
| Vec6 | Az |
| Vec6 | AzRef |
| Vec6 | AzLoc |
| Vec6 | DefLoc |
| Vec6 | DefLocRef |
| Vec3 | p |
| Vec3 | g |
| Vec3 | L0 |
| Vec3 | L |
| Vec3 | LRef |
| doublereal | xi |
| doublereal | dsdxi |
| doublereal | dxids |
| bool | bFirstRes |
| Vec3 | Rho |
| Vec3 | Rho0 |
| Mat3x3 | pdp [NUMNODES] |
| Mat3x3 | pdP [NUMNODES] |
| Mat3x3 | Ldp [NUMNODES] |
| Mat3x3 | LdP [NUMNODES] |
| Mat3x3 | RdP [NUMNODES] |
| Mat3x3 | RhodP [NUMNODES] |
| Protected Attributes inherited from WithLabel | |
| unsigned int | uLabel |
| std::string | sName |
| Protected Attributes inherited from ToBeOutput | |
| flag | fOutput |
| Protected Attributes inherited from GravityOwner | |
| Gravity * | pGravity |
Private Attributes | |
| Beam::Type | BeamT |
Friends | |
| class | AerodynamicBeam |
Additional Inherited Members | |
| Public Types inherited from Elem | |
| enum | Type { UNKNOWN = -1, AIRPROPERTIES = 0, INDUCEDVELOCITY, AUTOMATICSTRUCTURAL, GRAVITY, BODY, JOINT, JOINT_REGULARIZATION, BEAM, PLATE, FORCE, INERTIA, ELECTRICBULK, ELECTRIC, THERMAL, HYDRAULIC, BULK, LOADABLE, DRIVEN, EXTERNAL, AEROMODAL, AERODYNAMIC, GENEL, SOCKETSTREAM_OUTPUT, RTAI_OUTPUT = SOCKETSTREAM_OUTPUT, LASTELEMTYPE } |
| Public Types inherited from SimulationEntity | |
| typedef std::vector< Hint * > | Hints |
| Public Types inherited from ToBeOutput | |
| enum | { OUTPUT = 0x1U, OUTPUT_MASK = 0xFU, OUTPUT_PRIVATE = 0x10U, OUTPUT_PRIVATE_MASK = ~OUTPUT_MASK } |
|
protected |
| Enumerator | |
|---|---|
| STRAIN | |
| CURVAT | |
| NUMDEFORM | |
|
protected |
| Enumerator | |
|---|---|
| NODE1 | |
| NODE2 | |
| NUMNODES | |
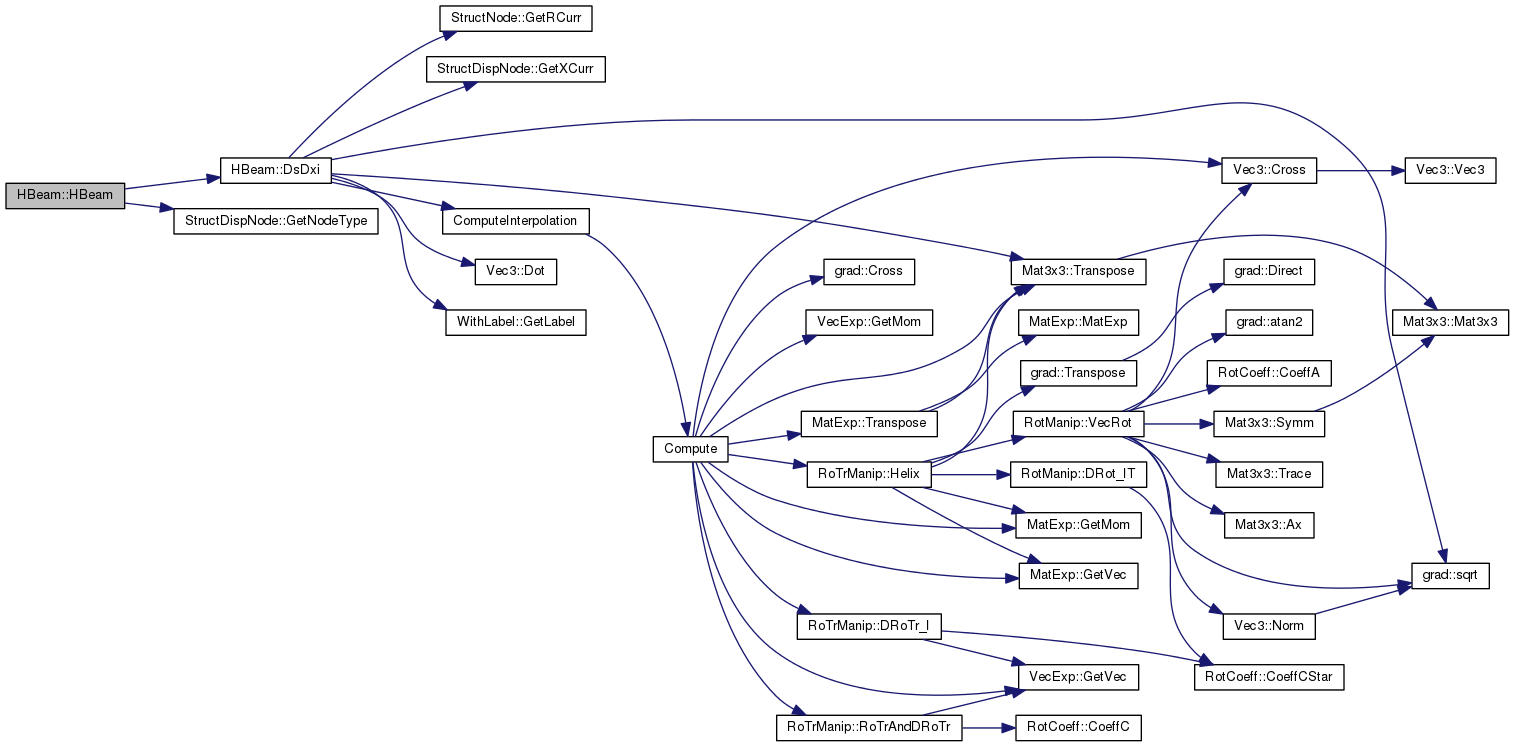
| HBeam::HBeam | ( | unsigned int | uL, |
| const StructNode * | pN1, | ||
| const StructNode * | pN2, | ||
| const Vec3 & | F1, | ||
| const Vec3 & | F2, | ||
| const Mat3x3 & | R1, | ||
| const Mat3x3 & | R2, | ||
| const ConstitutiveLaw6D * | pd, | ||
| flag | fOut | ||
| ) |
Definition at line 67 of file hbeam.cc.
References ASSERT, Az, AzLoc, AzRef, DefLoc, DefLocRef, DsDxi(), f, g, StructDispNode::GetNodeType(), L, L0, NODE1, NODE2, Omega, p, pD, pNode, Rn, SAFENEWWITHCONSTRUCTOR, Node::STRUCTURAL, Zero3, and Zero6.
|
virtual |
|
inlineprotectedvirtual |
Definition at line 159 of file hbeam.h.
References NO_OP.
Referenced by AfterPredict(), and AssStiffnessVec().
|
virtual |
Reimplemented from SimulationEntity.
Definition at line 347 of file hbeam.cc.
References ConstitutiveLawOwner< T, Tder >::AfterConvergence(), DefLoc, and pD.

|
virtual |
Reimplemented from SimulationEntity.
Definition at line 577 of file hbeam.cc.
References AddInternalForces(), Az, AzLoc, AzRef, bFirstRes, DefLoc, DefLocRef, DRef, f, g, ConstitutiveLawOwner< T, Tder >::GetF(), ConstitutiveLawOwner< T, Tder >::GetFDE(), StructNode::GetgRef(), StructNode::GetRRef(), StructDispNode::GetXCurr(), L, L0, LRef, CGR_Rot::MatG, CGR_Rot::MatR, MultRMRt(), MultRV(), NODE1, NODE2, NUMNODES, p, pD, pNode, R, RRef, and ConstitutiveLawOwner< T, Tder >::Update().

|
virtual |
Implements Elem.
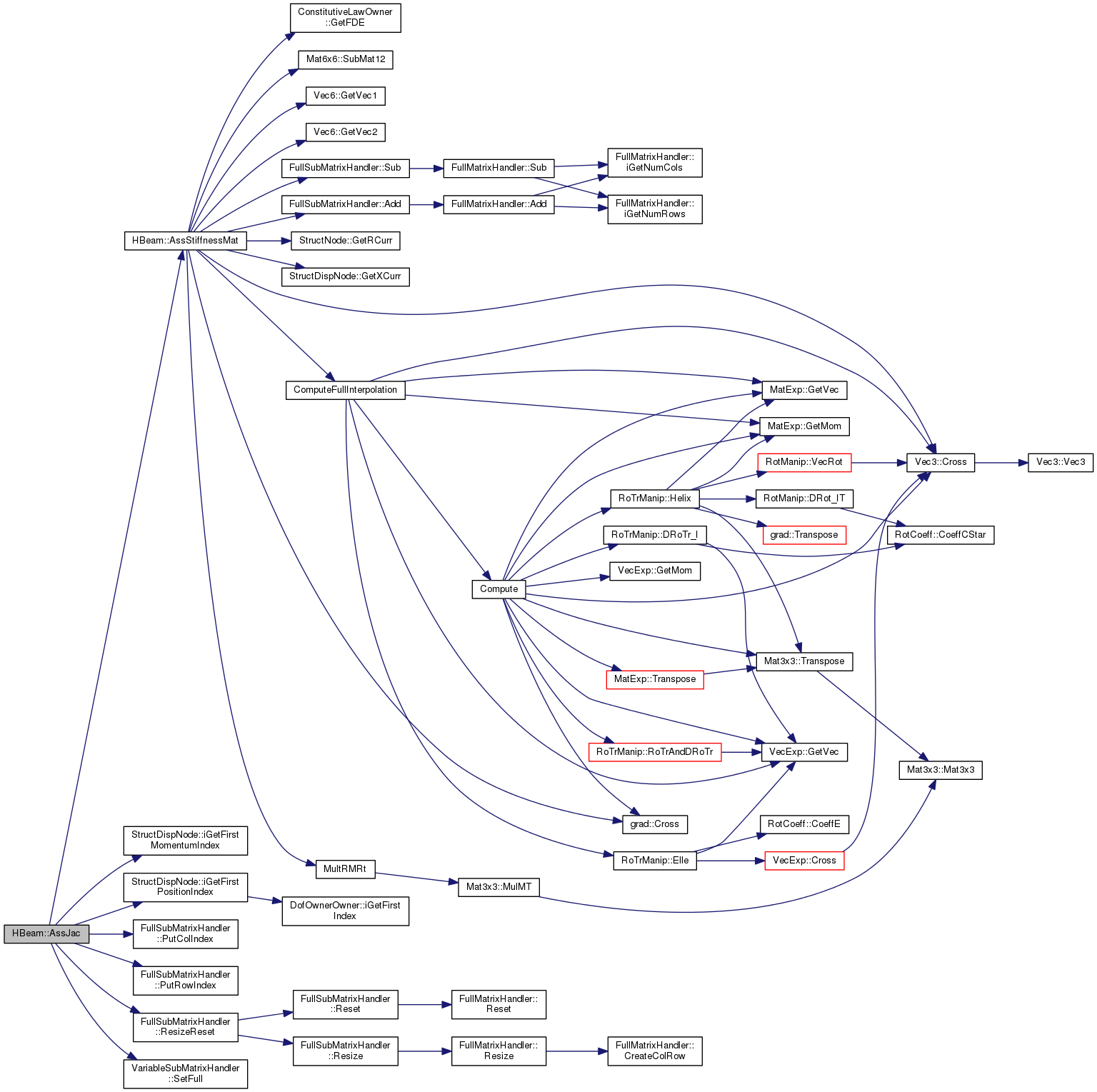
Definition at line 497 of file hbeam.cc.
References AssStiffnessMat(), DEBUGCOUTFNAME, StructDispNode::iGetFirstMomentumIndex(), StructDispNode::iGetFirstPositionIndex(), NODE1, NODE2, pNode, FullSubMatrixHandler::PutColIndex(), FullSubMatrixHandler::PutRowIndex(), FullSubMatrixHandler::ResizeReset(), and VariableSubMatrixHandler::SetFull().
|
virtual |
Implements Elem.
Definition at line 529 of file hbeam.cc.
References AssStiffnessVec(), DEBUGCOUTFNAME, StructDispNode::iGetFirstMomentumIndex(), NODE1, NODE2, pNode, SubVectorHandler::PutRowIndex(), and VectorHandler::ResizeReset().
|
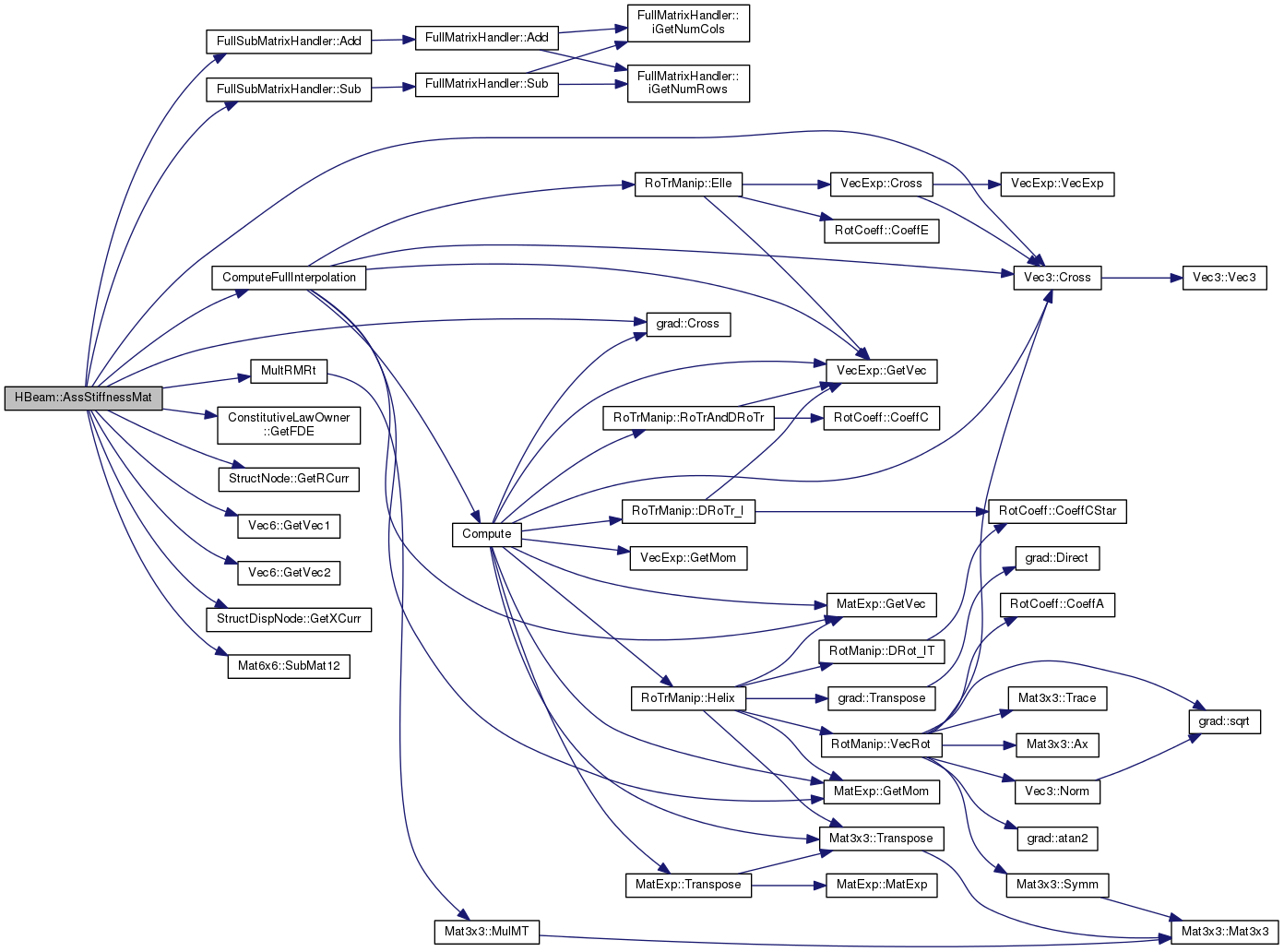
protectedvirtual |
Definition at line 354 of file hbeam.cc.
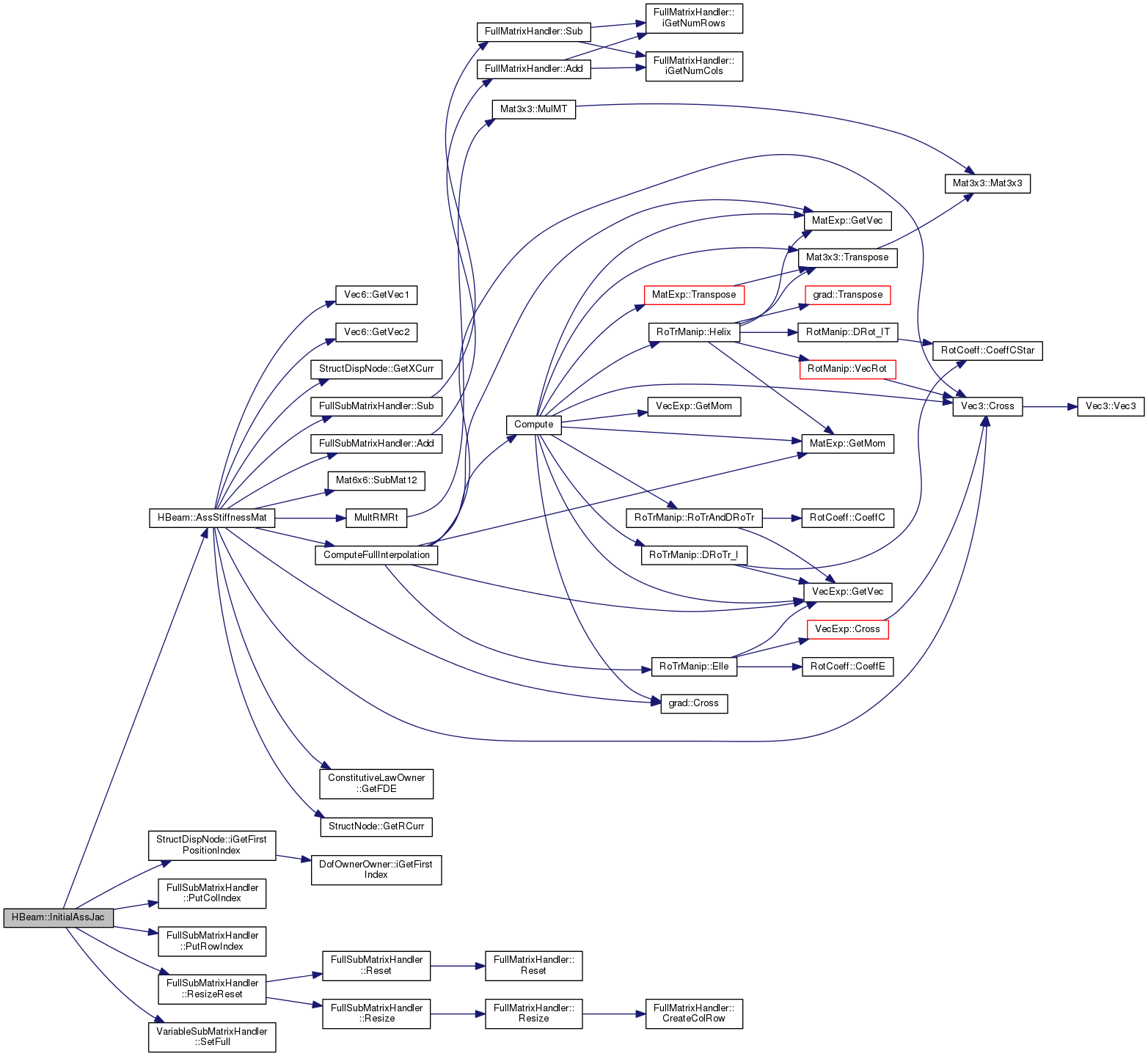
References FullSubMatrixHandler::Add(), AzRef, ComputeFullInterpolation(), Vec3::Cross(), grad::Cross(), DEBUGCOUTFNAME, DRef, dxids, f, ConstitutiveLawOwner< T, Tder >::GetFDE(), StructNode::GetRCurr(), Vec6::GetVec1(), Vec6::GetVec2(), StructDispNode::GetXCurr(), L, Ldp, LdP, MatCross, MultRMRt(), NODE1, NODE2, NUMNODES, p, pD, pdp, pdP, pNode, R, RdP, Rho, RhodP, Rn, FullSubMatrixHandler::Sub(), Mat6x6::SubMat12(), xi, and Zero3x3.
Referenced by AssJac(), and InitialAssJac().
|
protectedvirtual |
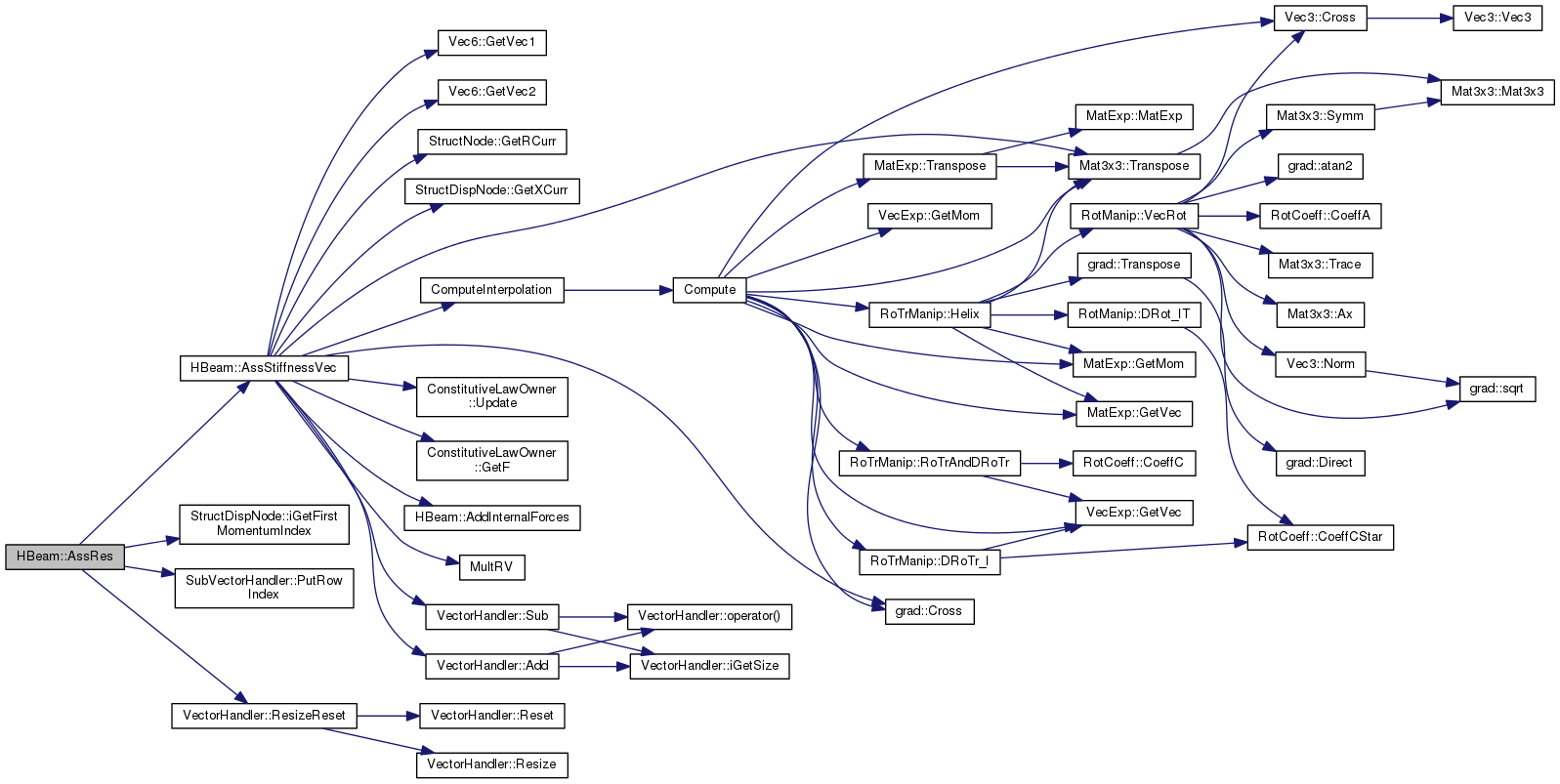
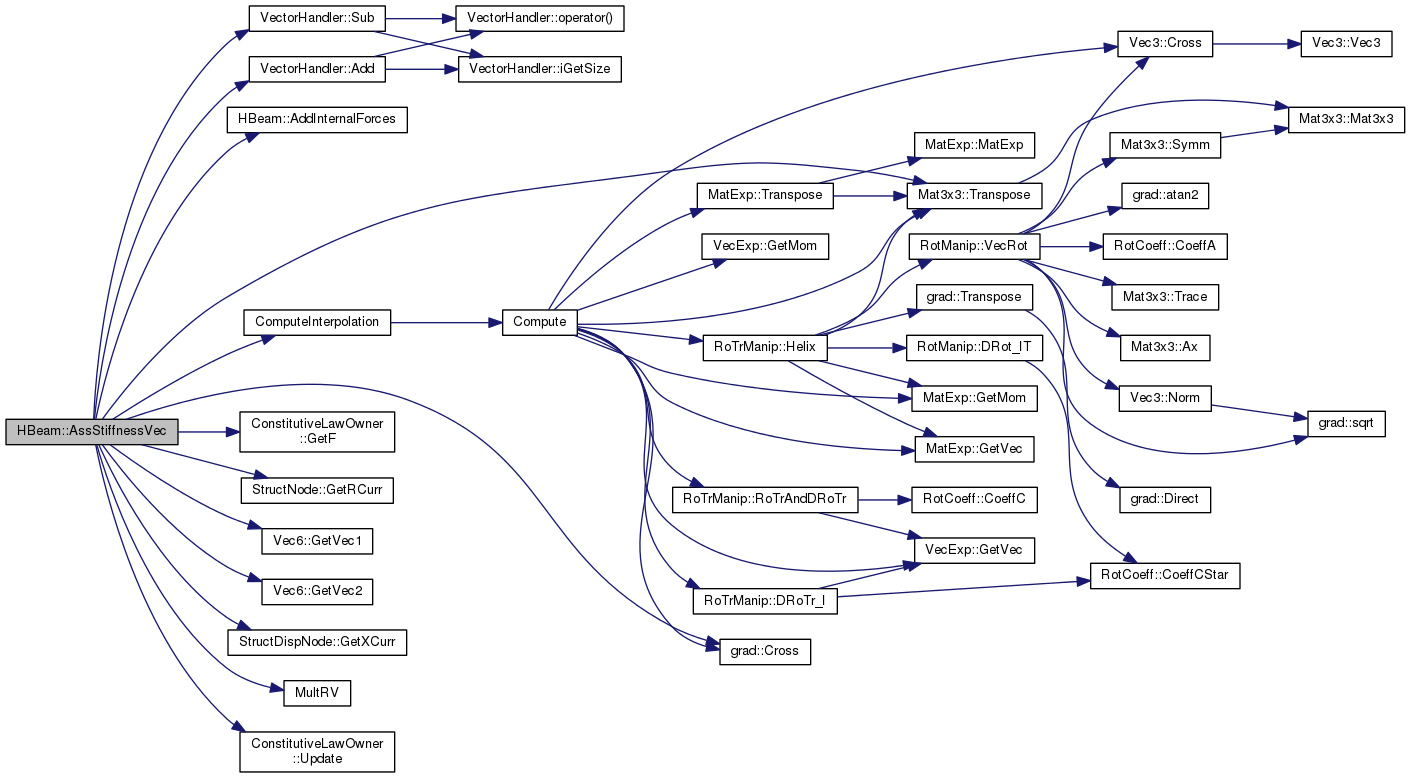
Definition at line 447 of file hbeam.cc.
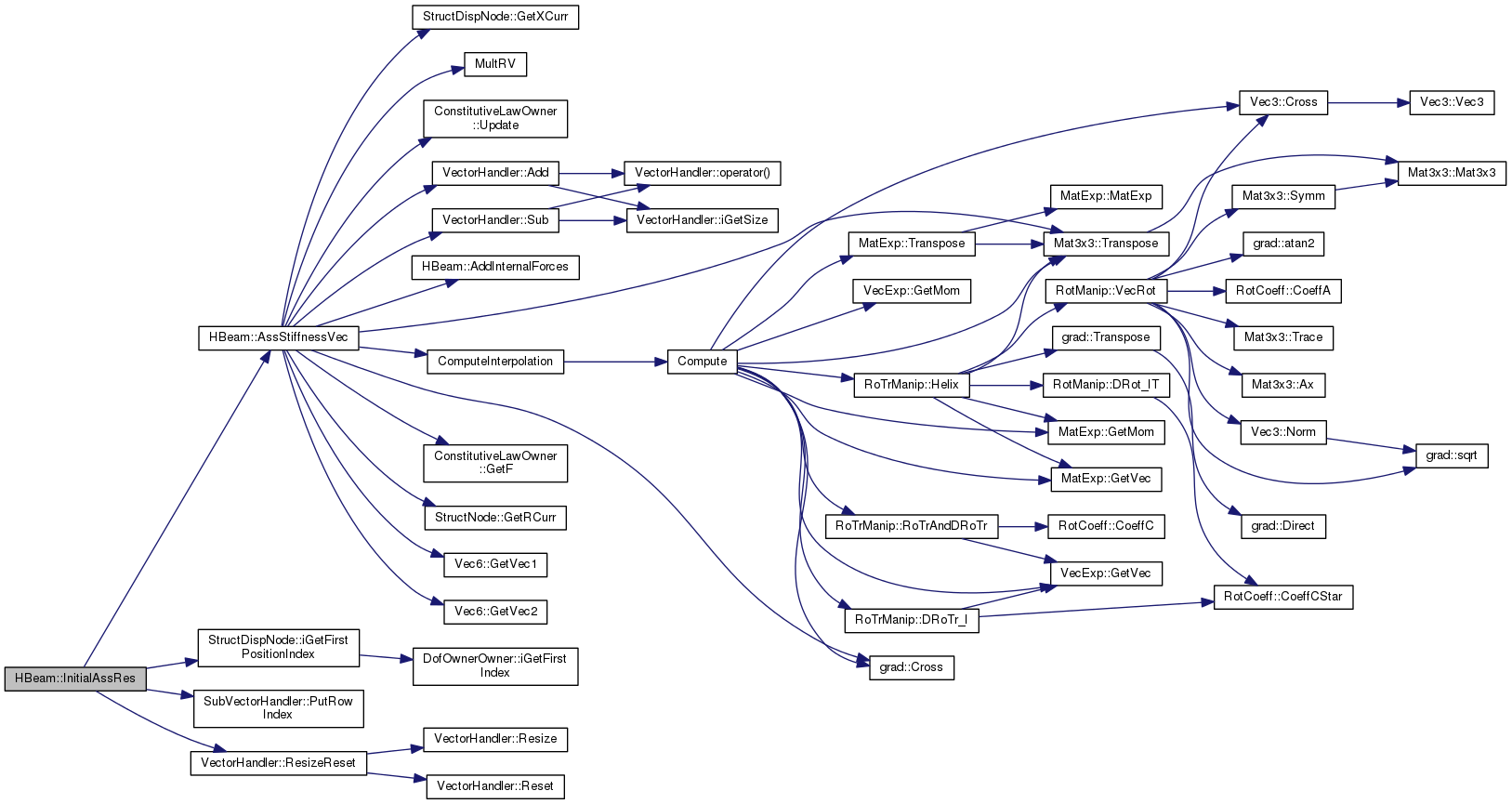
References VectorHandler::Add(), AddInternalForces(), Az, AzLoc, ComputeInterpolation(), grad::Cross(), DEBUGCOUTFNAME, DefLoc, dxids, f, ConstitutiveLawOwner< T, Tder >::GetF(), StructNode::GetRCurr(), Vec6::GetVec1(), Vec6::GetVec2(), StructDispNode::GetXCurr(), L, L0, MultRV(), NODE1, NODE2, NUMNODES, p, pD, pNode, R, Rho, Rho0, Rn, VectorHandler::Sub(), Mat3x3::Transpose(), ConstitutiveLawOwner< T, Tder >::Update(), and xi.
Referenced by AssRes(), and InitialAssRes().
|
virtual |
Reimplemented from SimulationEntity.
Definition at line 197 of file hbeam.cc.
References ASSERT, AzLoc, DefLoc, Vec6::dGet(), WithLabel::GetLabel(), and MBDYN_EXCEPT_ARGS.

|
protectedvirtual |
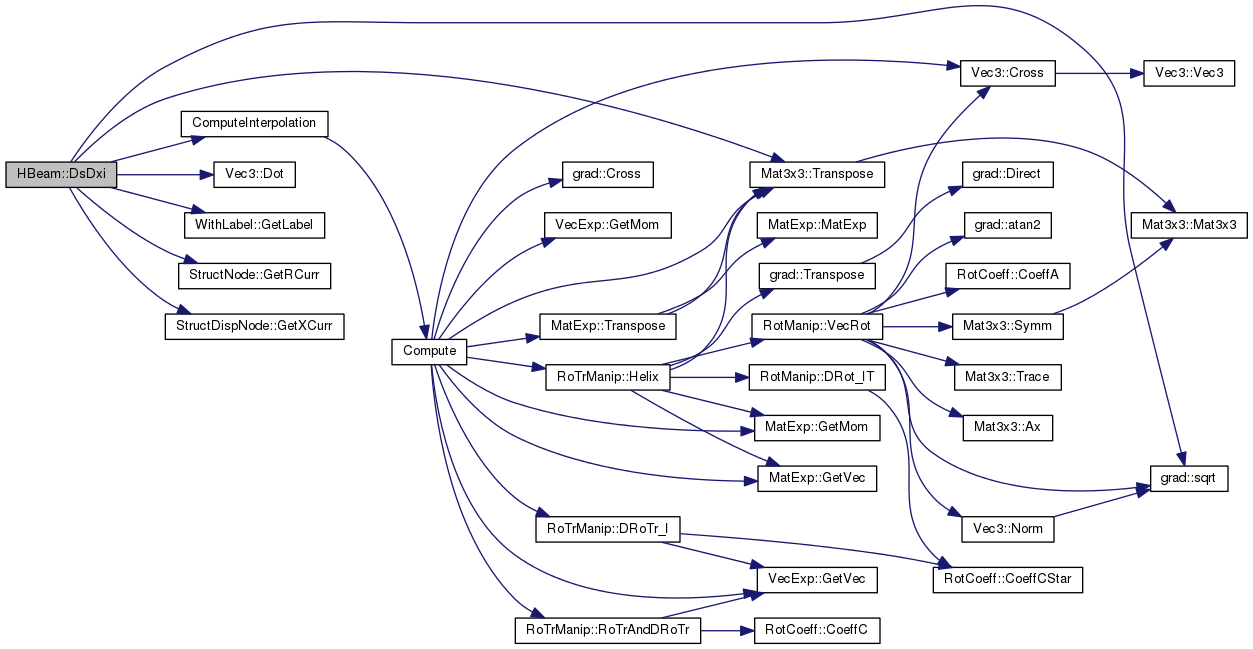
Definition at line 234 of file hbeam.cc.
References ComputeInterpolation(), Vec3::Dot(), dsdxi, dxids, f, WithLabel::GetLabel(), StructNode::GetRCurr(), StructDispNode::GetXCurr(), L, L0, LRef, MBDYN_EXCEPT_ARGS, NUMNODES, p, pNode, R, Rho, Rho0, Rn, RRef, grad::sqrt(), Mat3x3::Transpose(), and xi.
Referenced by HBeam().
|
inlinevirtual |
Definition at line 193 of file hbeam.h.
References Beam::ELASTIC.
|
inlinevirtual |
|
inlinevirtual |
|
inlinevirtual |
Implements SubjectToInitialAssembly.
|
virtual |
Reimplemented from SimulationEntity.
|
virtual |
|
virtual |
Implements SubjectToInitialAssembly.
Definition at line 656 of file hbeam.cc.
References AssStiffnessMat(), DEBUGCOUTFNAME, StructDispNode::iGetFirstPositionIndex(), NODE1, NODE2, pNode, FullSubMatrixHandler::PutColIndex(), FullSubMatrixHandler::PutRowIndex(), FullSubMatrixHandler::ResizeReset(), and VariableSubMatrixHandler::SetFull().
|
virtual |
Implements SubjectToInitialAssembly.
Definition at line 682 of file hbeam.cc.
References AssStiffnessVec(), DEBUGCOUTFNAME, StructDispNode::iGetFirstPositionIndex(), NODE1, NODE2, pNode, SubVectorHandler::PutRowIndex(), and VectorHandler::ResizeReset().
|
inlinevirtual |
Implements SubjectToInitialAssembly.
|
protectedvirtual |
Definition at line 285 of file hbeam.cc.
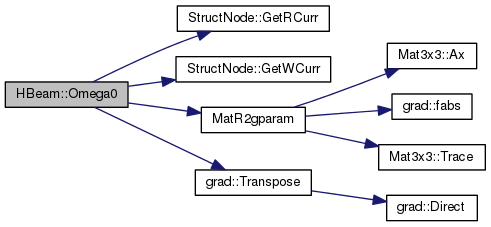
References dN2, StructNode::GetRCurr(), StructNode::GetWCurr(), CGR_Rot::MatG, CGR_Rot::MatGm1, MatR2gparam(), NODE1, NODE2, NUMNODES, Omega, pNode, and grad::Transpose().
|
virtual |
Reimplemented from ToBeOutput.
Definition at line 645 of file hbeam.cc.
References AzLoc, OutputHandler::Beams(), ToBeOutput::bToBeOutput(), WithLabel::GetLabel(), Vec6::GetVec1(), and Vec6::GetVec2().

|
virtual |
Definition at line 704 of file hbeam.cc.
References ASSERT, MBDYN_EXCEPT_ARGS, and pNode.
|
virtual |
Implements Elem.
Definition at line 325 of file hbeam.cc.
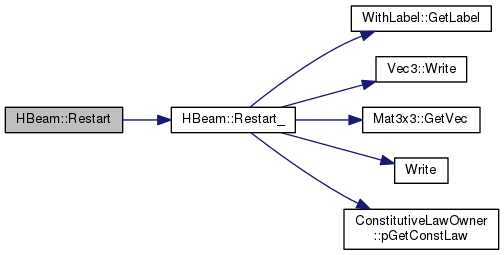
References Restart_().
|
protectedvirtual |
Definition at line 331 of file hbeam.cc.
References f, WithLabel::GetLabel(), Mat3x3::GetVec(), NUMNODES, pD, ConstitutiveLawOwner< T, Tder >::pGetConstLaw(), pNode, R, Write(), and Vec3::Write().
Referenced by Restart().
|
inlineprotected |
|
inlinevirtual |
|
virtual |
Implements ElemGravityOwner.
Definition at line 555 of file hbeam.cc.
References Az, AzRef, bFirstRes, DefLoc, DefLocRef, DRef, ConstitutiveLawOwner< T, Tder >::GetFDE(), L, LRef, MultRMRt(), pD, R, and RRef.

|
friend |
|
protected |
Definition at line 100 of file hbeam.h.
Referenced by AfterPredict(), AssStiffnessVec(), HBeam(), and SetValue().
|
protected |
Definition at line 102 of file hbeam.h.
Referenced by AfterPredict(), AssStiffnessVec(), dGetPrivData(), HBeam(), and Output().
|
protected |
Definition at line 101 of file hbeam.h.
Referenced by AfterPredict(), AssStiffnessMat(), HBeam(), and SetValue().
|
private |
Definition at line 68 of file hbeam.h.
Referenced by SetBeamType().
|
protected |
Definition at line 118 of file hbeam.h.
Referenced by AfterPredict(), and SetValue().
|
protected |
Definition at line 103 of file hbeam.h.
Referenced by AfterConvergence(), AfterPredict(), AssStiffnessVec(), dGetPrivData(), HBeam(), and SetValue().
|
protected |
Definition at line 104 of file hbeam.h.
Referenced by AfterPredict(), HBeam(), and SetValue().
|
protected |
Definition at line 93 of file hbeam.h.
Referenced by AfterPredict(), AssStiffnessMat(), and SetValue().
|
protected |
|
protected |
Definition at line 115 of file hbeam.h.
Referenced by AssStiffnessMat(), AssStiffnessVec(), and DsDxi().
Definition at line 78 of file hbeam.h.
Referenced by AfterPredict(), AssStiffnessMat(), AssStiffnessVec(), DsDxi(), HBeam(), and Restart_().
|
protected |
Definition at line 107 of file hbeam.h.
Referenced by AfterPredict(), and HBeam().
|
protected |
Definition at line 110 of file hbeam.h.
Referenced by AfterPredict(), AssStiffnessMat(), AssStiffnessVec(), DsDxi(), HBeam(), and SetValue().
|
protected |
Definition at line 109 of file hbeam.h.
Referenced by AfterPredict(), AssStiffnessVec(), DsDxi(), and HBeam().
Definition at line 131 of file hbeam.h.
Referenced by AssStiffnessMat().
Definition at line 132 of file hbeam.h.
Referenced by AssStiffnessMat().
|
protected |
Definition at line 111 of file hbeam.h.
Referenced by AfterPredict(), DsDxi(), and SetValue().
|
protected |
|
protected |
Definition at line 106 of file hbeam.h.
Referenced by AfterPredict(), AssStiffnessMat(), AssStiffnessVec(), DsDxi(), and HBeam().
|
protected |
Definition at line 90 of file hbeam.h.
Referenced by AfterConvergence(), AfterPredict(), AssStiffnessMat(), AssStiffnessVec(), HBeam(), Restart_(), SetValue(), and ~HBeam().
Definition at line 129 of file hbeam.h.
Referenced by AssStiffnessMat().
Definition at line 130 of file hbeam.h.
Referenced by AssStiffnessMat().
|
protected |
Definition at line 75 of file hbeam.h.
Referenced by AfterPredict(), AssJac(), AssRes(), AssStiffnessMat(), AssStiffnessVec(), DsDxi(), GetConnectedNodes(), HBeam(), InitialAssJac(), InitialAssRes(), Omega0(), pGetNode(), and Restart_().
|
protected |
Definition at line 86 of file hbeam.h.
Referenced by AfterPredict(), AssStiffnessMat(), AssStiffnessVec(), DsDxi(), Restart_(), and SetValue().
Definition at line 133 of file hbeam.h.
Referenced by AssStiffnessMat().
|
protected |
Definition at line 125 of file hbeam.h.
Referenced by AssStiffnessMat(), AssStiffnessVec(), and DsDxi().
|
protected |
Definition at line 126 of file hbeam.h.
Referenced by AssStiffnessVec(), and DsDxi().
Definition at line 134 of file hbeam.h.
Referenced by AssStiffnessMat().
Definition at line 82 of file hbeam.h.
Referenced by AssStiffnessMat(), AssStiffnessVec(), DsDxi(), and HBeam().
|
protected |
Definition at line 87 of file hbeam.h.
Referenced by AfterPredict(), DsDxi(), and SetValue().
|
protected |
Definition at line 113 of file hbeam.h.
Referenced by AssStiffnessMat(), AssStiffnessVec(), and DsDxi().
 1.8.7
1.8.7 
