← Louis Gagnon : projets achevés
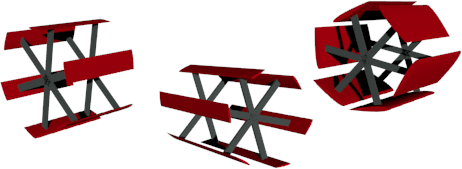
An aeroelastic study of
cycloidal rotors
used in various configurations
|
↓ activities - last updated 31 October 2017 ↓
|
|
↓ project description ↓ The cycloidal rotor concept has existed for one century. Only recently it is getting worldwide attention in the aeronautical research sector. Its high complexity prevented until recent advances in aerodynamic and structural analyses to setup safe experimental programs. I am currently developing computational fluid dynamics (CFD) and multibody dynamics (MBD) models to study cycloidal rotors in the following configurations: (a) Heligyro: replacing the tail rotor of a helicopter. (b) Quadricyclogyro: four-rotor short span aircraft. An example is the D-Dalus from IAT21. (c) Cyclowing: propeller of a two-rotor aircraft, using a configuration similar to the Fanwing. (d) Cyclomobile: active spoiler for a ground vehicle. When considering new configurations, it is essential to also study the energy consumption, handling and stability of the vehicle, which are interdependent aspects. The absence of models which consider the vehicle as a whole prevents proving or refuting the real effectiveness of the proposed applications. I am thus creating full vehicle multibody models for concepts (a), the Heligyro; (b), the Quadricyclogyro; and (d), the Cyclomobile. I am creating comprehensive CFD models for concepts (a), the Heligyro; (c), the Cyclowing; and (d), the Cyclomobile. These models should allow me to find stable and efficient configurations for each of the four concepts. I also plan to extend the current analytical models to represent a greater range of operating conditions. I will use them to setup the proper initial parameters of the comprehensive CFD and MBD models. |
|
↓ completed activities ↓
|
|
↓ related conference publications ↓ Cycloidal rotor aerodynamic and aeroelastic analysis Feasibility Assesment: A Cycloidal Rotor to Replace Conventional Helicopter Technology PECyT - Plasma enhanced cycloidal thruster Numerical Modelling of Geometrical Effects in the Performance of a Cycloidal Rotor Aerodynamic and Aeroelastic Analysis of a Cycloidal Rotor Cyclogyro thrust vectoring for anti-torque and control of helicopters |
|
↓ framework ↓ Polimi International Fellowship |
{kind=link}
{kind=link}