|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
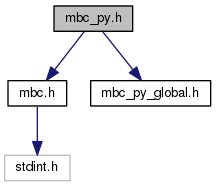
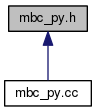
Go to the source code of this file.
Functions | |
| int | mbc_py_nodal_initialize (const char *const path, const char *const host, unsigned port, int timeout, unsigned verbose, unsigned data_and_next, unsigned refnode, unsigned nodes, unsigned labels, unsigned rot, unsigned accels) |
| int | mbc_py_nodal_negotiate (unsigned id) |
| int | mbc_py_nodal_send (unsigned id, int last) |
| int | mbc_py_nodal_recv (unsigned id) |
| int | mbc_py_nodal_destroy (unsigned id) |
| int | mbc_py_modal_initialize (const char *const path, const char *const host, unsigned port, int timeout, unsigned verbose, unsigned data_and_next, unsigned refnode, unsigned modes) |
| int | mbc_py_modal_negotiate (unsigned id) |
| int | mbc_py_modal_send (unsigned id, int last) |
| int | mbc_py_modal_recv (unsigned id) |
| int | mbc_py_modal_destroy (unsigned id) |
| int mbc_py_modal_destroy | ( | unsigned | id | ) |
Definition at line 426 of file mbc_py.cc.
References m_mbc, and mbc_modal_destroy().

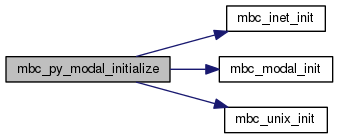
| int mbc_py_modal_initialize | ( | const char *const | path, |
| const char *const | host, | ||
| unsigned | port, | ||
| int | timeout, | ||
| unsigned | verbose, | ||
| unsigned | data_and_next, | ||
| unsigned | refnode, | ||
| unsigned | modes | ||
| ) |
Definition at line 312 of file mbc_py.cc.
References data_and_next, mbc_t::data_and_next, m_mbc, mbc, mbc_modal_t::mbc, mbc_inet_init(), mbc_modal_init(), mbc_unix_init(), timeout, mbc_t::timeout, verbose, and mbc_t::verbose.
| int mbc_py_modal_negotiate | ( | unsigned | id | ) |
Definition at line 363 of file mbc_py.cc.
References m_mbc, MBC_F_REF_NODE, mbc_m_p, mbc_m_p_size, mbc_m_q, mbc_m_q_size, mbc_m_qp, mbc_m_qp_size, mbc_modal_negotiate_request(), MBC_P, MBC_Q, MBC_QP, mbc_r_f, MBC_R_F, mbc_r_f_size, mbc_r_m, MBC_R_M, mbc_r_m_size, mbc_r_omega, MBC_R_OMEGA, mbc_r_omega_size, mbc_r_r, MBC_R_R, mbc_r_r_size, mbc_r_x, MBC_R_X, mbc_r_x_size, mbc_r_xp, MBC_R_XP, mbc_r_xp_size, and mbc_modal_t::modes.

| int mbc_py_modal_recv | ( | unsigned | id | ) |
Definition at line 416 of file mbc_py.cc.
References m_mbc, and mbc_modal_get_motion().

Definition at line 406 of file mbc_py.cc.
References m_mbc, and mbc_modal_put_forces().

| int mbc_py_nodal_destroy | ( | unsigned | id | ) |
Definition at line 288 of file mbc_py.cc.
References mbc_nodal_destroy(), and n_mbc.

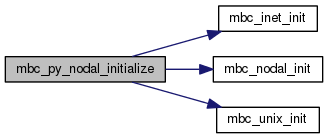
| int mbc_py_nodal_initialize | ( | const char *const | path, |
| const char *const | host, | ||
| unsigned | port, | ||
| int | timeout, | ||
| unsigned | verbose, | ||
| unsigned | data_and_next, | ||
| unsigned | refnode, | ||
| unsigned | nodes, | ||
| unsigned | labels, | ||
| unsigned | rot, | ||
| unsigned | accels | ||
| ) |
Definition at line 97 of file mbc_py.cc.
References data_and_next, mbc_t::data_and_next, mbc, mbc_nodal_t::mbc, mbc_inet_init(), mbc_nodal_init(), mbc_unix_init(), n_mbc, timeout, mbc_t::timeout, verbose, and mbc_t::verbose.
| int mbc_py_nodal_negotiate | ( | unsigned | id | ) |
Definition at line 149 of file mbc_py.cc.
References MBC_F_ACCELS, MBC_F_LABELS, MBC_F_REF_NODE, MBC_F_ROT, MBC_F_ROT_REF_NODE, mbc_n_d_labels, MBC_N_D_LABELS, mbc_n_d_labels_size, mbc_n_euler_123, MBC_N_EULER_123, mbc_n_euler_123_size, mbc_n_f, MBC_N_F, mbc_n_f_size, mbc_n_k_labels, MBC_N_K_LABELS, mbc_n_k_labels_size, mbc_n_m, MBC_N_M, mbc_n_m_size, mbc_n_omega, MBC_N_OMEGA, mbc_n_omega_size, mbc_n_omegap, MBC_N_OMEGAP, mbc_n_omegap_size, mbc_n_r, MBC_N_R, mbc_n_r_size, mbc_n_theta, MBC_N_THETA, mbc_n_theta_size, mbc_n_x, MBC_N_X, mbc_n_x_size, mbc_n_xp, MBC_N_XP, mbc_n_xp_size, mbc_n_xpp, MBC_N_XPP, mbc_n_xpp_size, mbc_nodal_negotiate_request(), mbc_r_d_label, MBC_R_D_LABEL, mbc_r_d_label_size, mbc_r_euler_123, MBC_R_EULER_123, mbc_r_euler_123_size, mbc_r_f, MBC_R_F, mbc_r_f_size, mbc_r_k_label, MBC_R_K_LABEL, mbc_r_k_label_size, mbc_r_m, MBC_R_M, mbc_r_m_size, mbc_r_omega, MBC_R_OMEGA, mbc_r_omega_size, mbc_r_omegap, MBC_R_OMEGAP, mbc_r_omegap_size, mbc_r_r, MBC_R_R, mbc_r_r_size, mbc_r_theta, MBC_R_THETA, mbc_r_theta_size, mbc_r_x, MBC_R_X, mbc_r_x_size, mbc_r_xp, MBC_R_XP, mbc_r_xp_size, mbc_r_xpp, MBC_R_XPP, mbc_r_xpp_size, MBC_ROT_EULER_123, MBC_ROT_MAT, MBC_ROT_NONE, MBC_ROT_THETA, n_mbc, and mbc_nodal_t::nodes.

| int mbc_py_nodal_recv | ( | unsigned | id | ) |
Definition at line 278 of file mbc_py.cc.
References mbc_nodal_get_motion(), and n_mbc.

Definition at line 268 of file mbc_py.cc.
References mbc_nodal_put_forces(), and n_mbc.

 1.8.7
1.8.7 
