|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
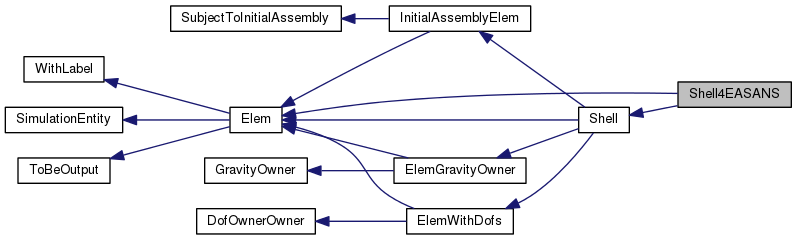
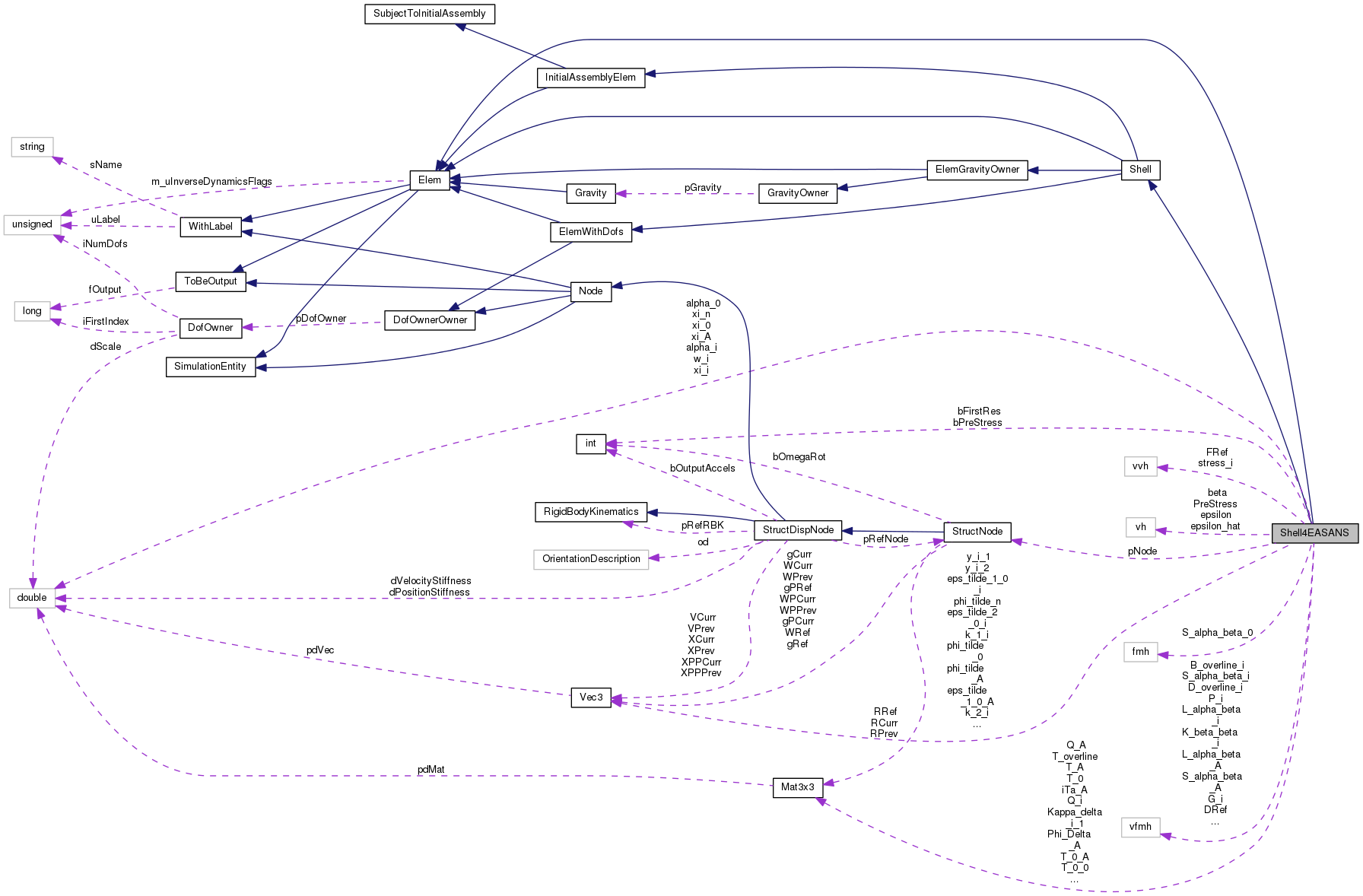
#include <shelleasans.h>
Public Member Functions | |
| Shell4EASANS (unsigned int uL, const DofOwner *pDO, const StructNode *pN1, const StructNode *pN2, const StructNode *pN3, const StructNode *pN4, const Mat3x3 &R1, const Mat3x3 &R2, const Mat3x3 &R3, const Mat3x3 &R4, const fmh &pDTmp, const vh &PreStress, flag fOut) | |
| virtual | ~Shell4EASANS (void) |
| virtual Shell::Type | GetShellType (void) const |
| virtual Elem::Type | GetElemType (void) const |
| virtual unsigned int | iGetNumDof (void) const |
| virtual DofOrder::Order | GetDofType (unsigned int i) const |
| virtual DofOrder::Order | GetEqType (unsigned int i) const |
| virtual std::ostream & | Restart (std::ostream &out) const |
| virtual void | WorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| void | SetValue (DataManager *pDM, VectorHandler &, VectorHandler &, SimulationEntity::Hints *ph=0) |
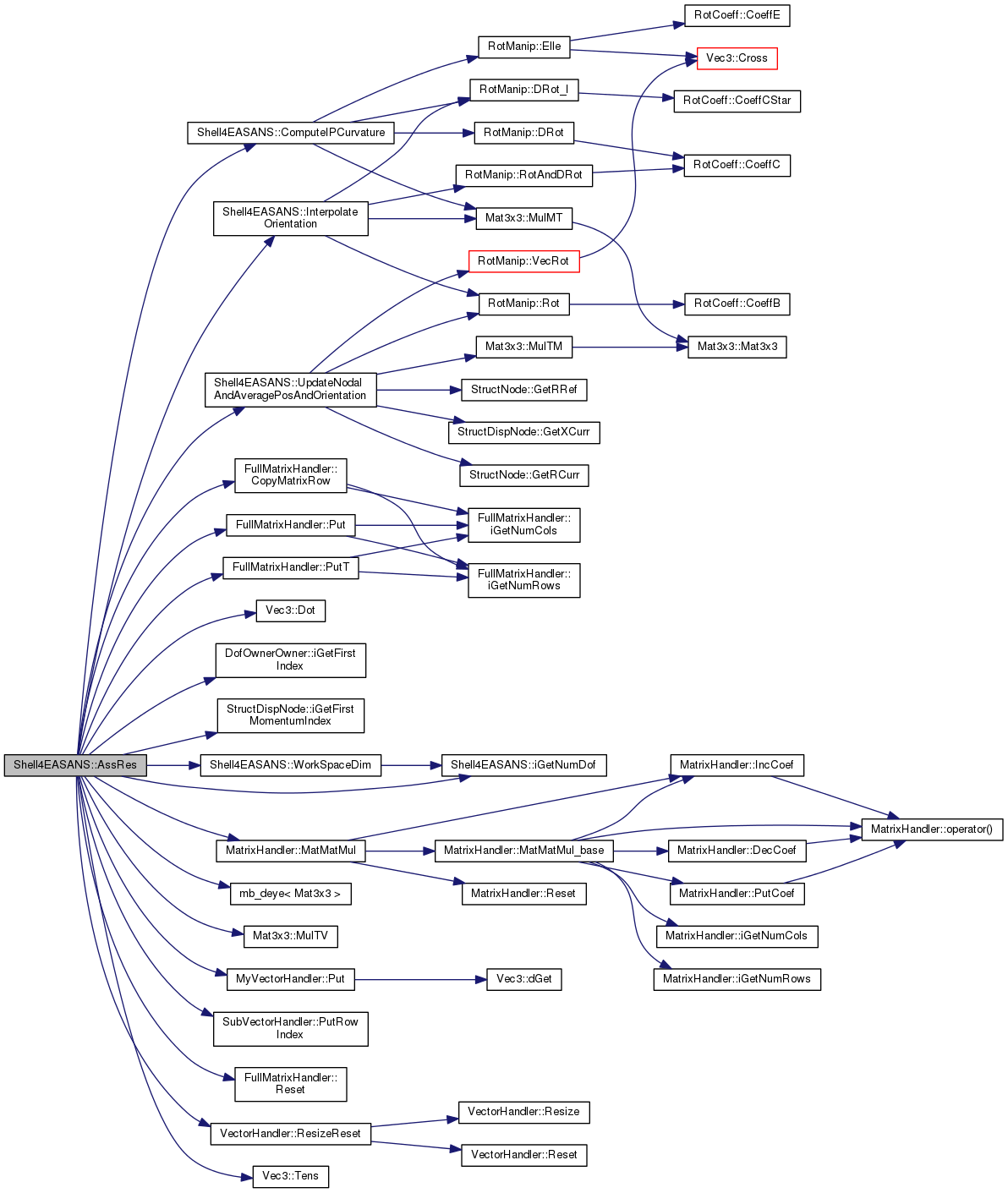
| virtual SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
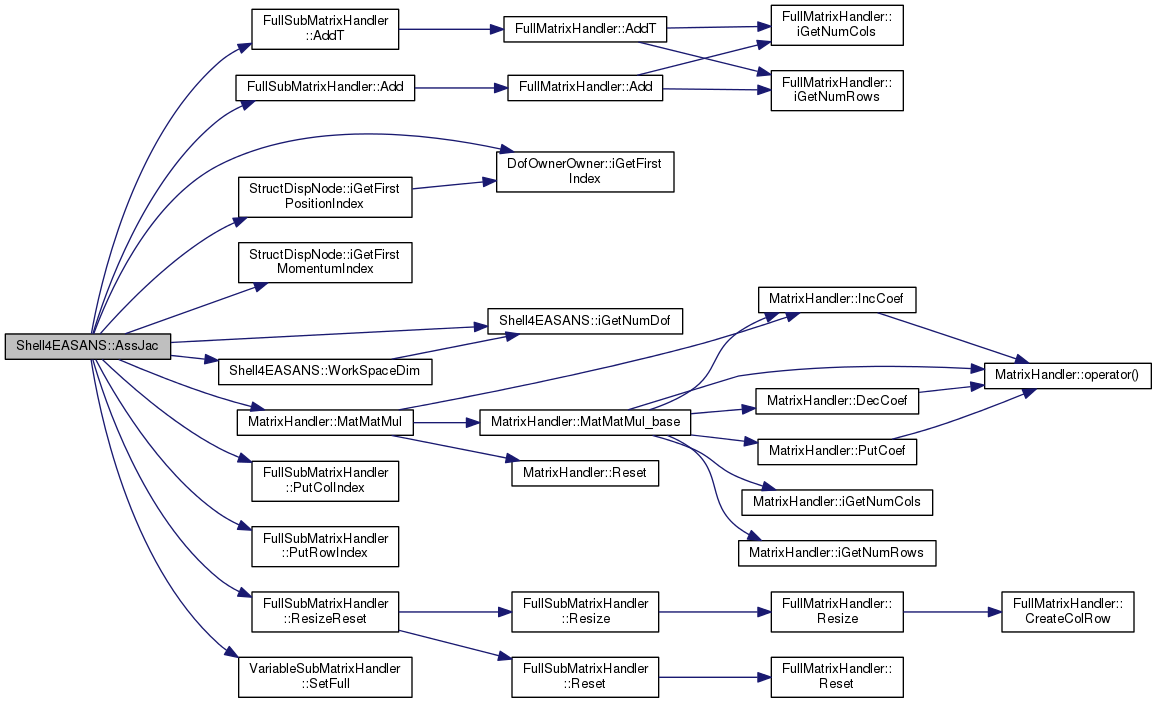
| virtual VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
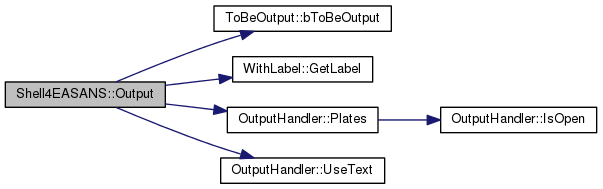
| virtual void | Output (OutputHandler &OH) const |
| virtual unsigned int | iGetInitialNumDof (void) const |
| virtual void | InitialWorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| virtual void | SetInitialValue (VectorHandler &) |
| virtual VariableSubMatrixHandler & | InitialAssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| virtual SubVectorHandler & | InitialAssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr) |
| virtual const StructNode * | pGetNode (unsigned int i) const |
| virtual void | GetConnectedNodes (std::vector< const Node * > &connectedNodes) const |
 Public Member Functions inherited from Elem Public Member Functions inherited from Elem | |
| Elem (unsigned int uL, flag fOut) | |
| virtual | ~Elem (void) |
| virtual std::ostream & | DescribeDof (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeDof (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual std::ostream & | DescribeEq (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeEq (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual void | AssMats (VariableSubMatrixHandler &WorkMatA, VariableSubMatrixHandler &WorkMatB, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual bool | bInverseDynamics (void) const |
| void | SetInverseDynamicsFlags (unsigned uIDF) |
| unsigned | GetInverseDynamicsFlags (void) const |
| bool | bIsErgonomy (void) const |
| bool | bIsRightHandSide (void) const |
| virtual VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| virtual SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr, const VectorHandler &XPrimePrimeCurr, InverseDynamics::Order iOrder=InverseDynamics::INVERSE_DYNAMICS) |
| virtual int | GetNumConnectedNodes (void) const |
| Public Member Functions inherited from WithLabel | |
| WithLabel (unsigned int uL=0, const std::string &sN="") | |
| virtual | ~WithLabel (void) |
| void | PutLabel (unsigned int uL) |
| void | PutName (const std::string &sN) |
| unsigned int | GetLabel (void) const |
| const std::string & | GetName (void) const |
| Public Member Functions inherited from SimulationEntity | |
| SimulationEntity (void) | |
| virtual | ~SimulationEntity (void) |
| virtual bool | bIsValidIndex (unsigned int i) const |
| virtual Hint * | ParseHint (DataManager *pDM, const char *s) const |
| virtual void | BeforePredict (VectorHandler &, VectorHandler &, VectorHandler &, VectorHandler &) const |
| virtual void | AfterPredict (VectorHandler &X, VectorHandler &XP) |
| virtual void | Update (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | DerivativesUpdate (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | Update (const VectorHandler &XCurr, InverseDynamics::Order iOrder) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP, const VectorHandler &XPP) |
| virtual unsigned int | iGetNumPrivData (void) const |
| virtual unsigned int | iGetPrivDataIdx (const char *s) const |
| virtual doublereal | dGetPrivData (unsigned int i) const |
| virtual std::ostream & | OutputAppend (std::ostream &out) const |
| virtual void | ReadInitialState (MBDynParser &HP) |
| Public Member Functions inherited from ToBeOutput | |
| ToBeOutput (flag fOut=fDefaultOut) | |
| virtual | ~ToBeOutput (void) |
| virtual void | OutputPrepare (OutputHandler &OH) |
| virtual void | Output (OutputHandler &OH, const VectorHandler &X, const VectorHandler &XP) const |
| virtual flag | fToBeOutput (void) const |
| virtual bool | bToBeOutput (void) const |
| virtual void | SetOutputFlag (flag f=flag(1)) |
| Public Member Functions inherited from Shell | |
| Shell (unsigned uLabel, const DofOwner *pDO, flag fOut) | |
| virtual | ~Shell (void) |
| Public Member Functions inherited from ElemGravityOwner | |
| ElemGravityOwner (unsigned int uL, flag fOut) | |
| virtual | ~ElemGravityOwner (void) |
| virtual doublereal | dGetM (void) const |
| Vec3 | GetS (void) const |
| Mat3x3 | GetJ (void) const |
| Vec3 | GetB (void) const |
| Vec3 | GetG (void) const |
| Public Member Functions inherited from GravityOwner | |
| GravityOwner (void) | |
| virtual | ~GravityOwner (void) |
| void | PutGravity (const Gravity *pG) |
| virtual bool | bGetGravity (const Vec3 &X, Vec3 &Acc) const |
| Public Member Functions inherited from ElemWithDofs | |
| ElemWithDofs (unsigned int uL, const DofOwner *pDO, flag fOut) | |
| virtual | ~ElemWithDofs (void) |
| Public Member Functions inherited from DofOwnerOwner | |
| DofOwnerOwner (const DofOwner *pDO) | |
| virtual | ~DofOwnerOwner () |
| virtual const DofOwner * | pGetDofOwner (void) const |
| virtual integer | iGetFirstIndex (void) const |
| Public Member Functions inherited from InitialAssemblyElem | |
| InitialAssemblyElem (unsigned int uL, flag fOut) | |
| virtual | ~InitialAssemblyElem (void) |
| Public Member Functions inherited from SubjectToInitialAssembly | |
| SubjectToInitialAssembly (void) | |
| virtual | ~SubjectToInitialAssembly (void) |
Static Public Attributes | |
| static doublereal | xi_i [NUMIP][2] |
| static doublereal | w_i [NUMIP] |
| static doublereal | xi_A [NUMSSEP][2] |
| static doublereal | xi_n [NUMNODES][2] |
| static doublereal | xi_0 [2] = {0., 0.} |
Protected Member Functions | |
| virtual void | AddInternalForces (Vec6 &, unsigned int) |
| Protected Member Functions inherited from ElemGravityOwner | |
| virtual Vec3 | GetS_int (void) const |
| virtual Mat3x3 | GetJ_int (void) const |
| virtual Vec3 | GetB_int (void) const |
| virtual Vec3 | GetG_int (void) const |
Private Member Functions | |
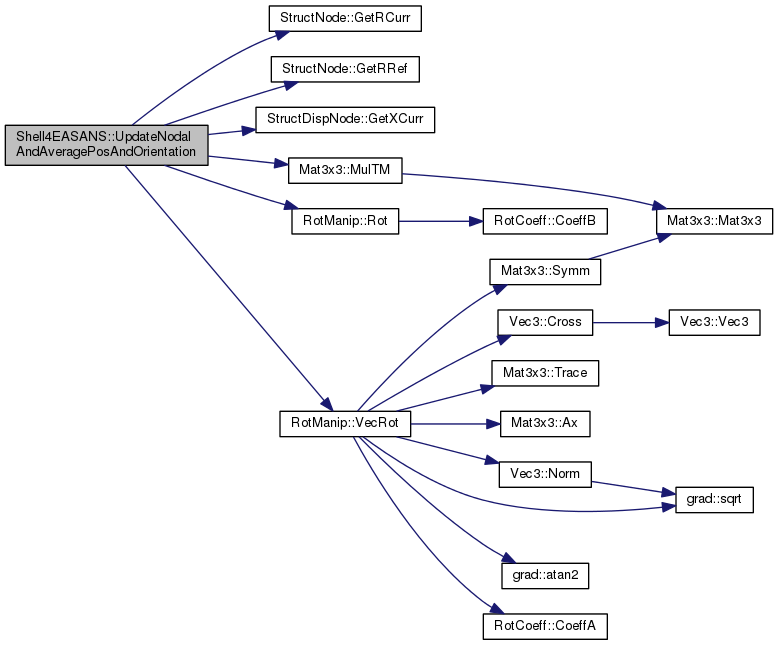
| void | UpdateNodalAndAveragePosAndOrientation () |
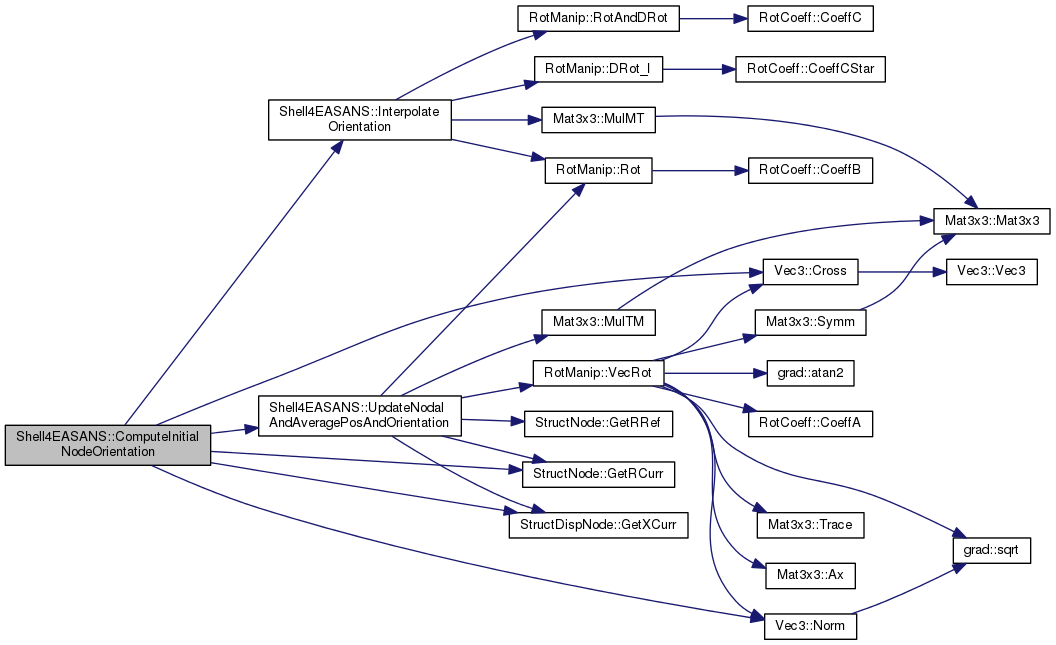
| void | ComputeInitialNodeOrientation () |
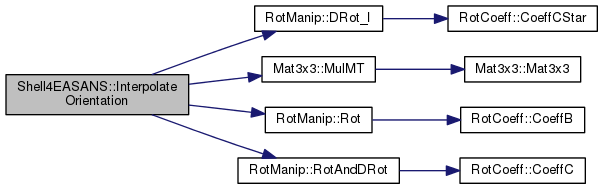
| void | InterpolateOrientation () |
| void | ComputeIPCurvature () |
Definition at line 70 of file shelleasans.h.
| Enumerator | |
|---|---|
| STRAIN | |
| CURVAT | |
| NUMDEFORM | |
Definition at line 144 of file shelleasans.h.
| Enumerator | |
|---|---|
| IP_1_1 | |
| IP_1_2 | |
| IP_1_3 | |
| IP_2_1 | |
| IP_2_2 | |
| IP_2_3 | |
| IP_3_1 | |
| IP_3_2 | |
| IP_3_3 | |
| NUMIP | |
Definition at line 102 of file shelleasans.h.
| Enumerator | |
|---|---|
| NODE1 | |
| NODE2 | |
| NODE3 | |
| NODE4 | |
| NUMNODES | |
Definition at line 131 of file shelleasans.h.
| Enumerator | |
|---|---|
| SSEP_1 | |
| SSEP_2 | |
| SSEP_3 | |
| SSEP_4 | |
| NUMSSEP | |
Definition at line 120 of file shelleasans.h.
| Shell4EASANS::Shell4EASANS | ( | unsigned int | uL, |
| const DofOwner * | pDO, | ||
| const StructNode * | pN1, | ||
| const StructNode * | pN2, | ||
| const StructNode * | pN3, | ||
| const StructNode * | pN4, | ||
| const Mat3x3 & | R1, | ||
| const Mat3x3 & | R2, | ||
| const Mat3x3 & | R3, | ||
| const Mat3x3 & | R4, | ||
| const fmh & | pDTmp, | ||
| const vh & | PreStress, | ||
| flag | fOut | ||
| ) |
Definition at line 253 of file shelleasans.cc.
References alpha_0, alpha_i, ComputeInitialNodeOrientation(), ComputeIPCurvature(), DRef, eps_tilde_1_0_A, eps_tilde_1_0_i, eps_tilde_2_0_A, eps_tilde_2_0_i, Mat3x3::GetCol(), iGetNumDof(), k_1_i, k_2_i, k_tilde_1_0_i, k_tilde_2_0_i, L_alpha_beta_A, L_alpha_beta_i, MatrixHandler::MatMatMul(), MatrixHandler::MatTMatMul(), Mat3x3::MulTV(), NODE1, NODE2, NODE3, NODE4, NUMIP, NUMNODES, NUMSSEP, P_i, pNode, S_alpha_beta_0, S_alpha_beta_A, S_alpha_beta_i, SAFENEWWITHCONSTRUCTOR, T0_overline, T_0, T_0_0, T_0_A, T_0_i, T_A, T_i, T_overline, xa, xa_0, xi_0, xi_A, xi_i, y_i_1, and y_i_2.

|
virtual |
Definition at line 476 of file shelleasans.cc.
References ASSERT, NUMIP, and SAFEDELETE.
|
inlineprotectedvirtual |
Definition at line 294 of file shelleasans.h.
References NO_OP.
|
virtual |
Implements Elem.
Definition at line 715 of file shelleasans.cc.
References FullSubMatrixHandler::Add(), FullSubMatrixHandler::AddT(), alpha_i, B_overline_i, D_overline_i, DRef, G_i, DofOwnerOwner::iGetFirstIndex(), StructDispNode::iGetFirstMomentumIndex(), StructDispNode::iGetFirstPositionIndex(), iGetNumDof(), MatrixHandler::MatMatMul(), NUMIP, P_i, pNode, FullSubMatrixHandler::PutColIndex(), FullSubMatrixHandler::PutRowIndex(), FullSubMatrixHandler::ResizeReset(), VariableSubMatrixHandler::SetFull(), w_i, and WorkSpaceDim().
|
virtual |
Implements Elem.
Definition at line 488 of file shelleasans.cc.
References alpha_i, B_overline_i, beta, bPreStress, ComputeIPCurvature(), FullMatrixHandler::CopyMatrixRow(), D_overline_i, Vec3::Dot(), DRef, eps_tilde_1_0_A, eps_tilde_1_0_i, eps_tilde_1_A, eps_tilde_1_i, eps_tilde_2_0_A, eps_tilde_2_0_i, eps_tilde_2_A, eps_tilde_2_i, epsilon, epsilon_hat, G_i, DofOwnerOwner::iGetFirstIndex(), StructDispNode::iGetFirstMomentumIndex(), iGetNumDof(), InterpolateOrientation(), k_1_i, k_2_i, k_tilde_1_0_i, k_tilde_1_i, k_tilde_2_0_i, k_tilde_2_i, Kappa_delta_i_1, Kappa_delta_i_2, L_alpha_beta_A, L_alpha_beta_i, MatCross, MatrixHandler::MatMatMul(), mb_deye< Mat3x3 >(), Mat3x3::MulTV(), NUMIP, NUMNODES, NUMSSEP, P_i, Phi_Delta_A, Phi_Delta_i, phi_tilde_n, pNode, PreStress, MyVectorHandler::Put(), FullMatrixHandler::Put(), SubVectorHandler::PutRowIndex(), FullMatrixHandler::PutT(), FullMatrixHandler::Reset(), VectorHandler::ResizeReset(), stress_i, T_A, T_i, Vec3::Tens(), UpdateNodalAndAveragePosAndOrientation(), w_i, WorkSpaceDim(), xa, xi_A, xi_i, y_i_1, y_i_2, and Zero3.
|
private |
Definition at line 138 of file shelleasans.cc.
References Vec3::Cross(), Eye3, StructNode::GetRCurr(), StructDispNode::GetXCurr(), InterpolateOrientation(), iTa, iTa_A, iTa_i, Vec3::Norm(), NUMIP, NUMNODES, NUMSSEP, pNode, T_A, T_i, UpdateNodalAndAveragePosAndOrientation(), xa, xi_A, xi_i, and xi_n.
Referenced by Shell4EASANS().
|
private |
Definition at line 229 of file shelleasans.cc.
References RotManip::DRot(), RotManip::DRot_I(), RotManip::Elle(), k_1_i, k_2_i, Kappa_delta_i_1, Kappa_delta_i_2, L_alpha_beta_i, Mat3x3::MulMT(), NUMIP, NUMNODES, Phi_Delta_i, phi_tilde_i, phi_tilde_n, T_overline, xi_i, and Zero3.
Referenced by AssRes(), and Shell4EASANS().

|
inlinevirtual |
Reimplemented from Elem.
Definition at line 452 of file shelleasans.h.
References NUMNODES, and pNode.
|
inlinevirtual |
Reimplemented from Elem.
Definition at line 341 of file shelleasans.h.
References DofOrder::ALGEBRAIC, ASSERT, and iGetNumDof().

|
inlinevirtual |
|
inlinevirtual |
Reimplemented from SimulationEntity.
Definition at line 346 of file shelleasans.h.
References DofOrder::ALGEBRAIC, ASSERT, and iGetNumDof().

|
inlinevirtual |
Definition at line 327 of file shelleasans.h.
References Shell::ELASTIC.
|
inlinevirtual |
Implements SubjectToInitialAssembly.
Definition at line 417 of file shelleasans.h.
|
inlinevirtual |
Reimplemented from Elem.
Definition at line 336 of file shelleasans.h.
Referenced by AssJac(), AssRes(), GetDofType(), GetEqType(), Shell4EASANS(), and WorkSpaceDim().
|
virtual |
Implements SubjectToInitialAssembly.
Definition at line 817 of file shelleasans.cc.
References VariableSubMatrixHandler::SetNullMatrix().

|
virtual |
Implements SubjectToInitialAssembly.
Definition at line 825 of file shelleasans.cc.
References VectorHandler::Resize().

|
inlinevirtual |
Implements SubjectToInitialAssembly.
Definition at line 422 of file shelleasans.h.
|
private |
Definition at line 185 of file shelleasans.cc.
References RotManip::DRot_I(), iTa_A, iTa_i, Mat3x3::MulMT(), NUMIP, NUMNODES, NUMSSEP, Phi_Delta_A, Phi_Delta_i, phi_tilde_0, phi_tilde_A, phi_tilde_i, phi_tilde_n, RotManip::Rot(), RotManip::RotAndDRot(), T_0, T_A, T_i, T_overline, xi_0, xi_A, and xi_i.
Referenced by AssRes(), and ComputeInitialNodeOrientation().
|
virtual |
Reimplemented from ToBeOutput.
Definition at line 848 of file shelleasans.cc.
References ToBeOutput::bToBeOutput(), WithLabel::GetLabel(), NUMIP, OutputHandler::PLATES, OutputHandler::Plates(), stress_i, and OutputHandler::UseText().
|
virtual |
Definition at line 833 of file shelleasans.cc.
References ASSERT, MBDYN_EXCEPT_ARGS, and pNode.
|
virtual |
Implements Elem.
Definition at line 802 of file shelleasans.cc.
|
inlinevirtual |
Initialize state vector used in initial assembly. May set internal states of the element. Do not rely on being always called, because initial assembly could be implicitly or explicitly skipped
Reimplemented from DofOwnerOwner.
Definition at line 427 of file shelleasans.h.
References NO_OP.
|
virtual |
Reimplemented from SimulationEntity.
Definition at line 809 of file shelleasans.cc.
References NO_OP.
|
private |
Definition at line 116 of file shelleasans.cc.
References StructNode::GetRCurr(), StructNode::GetRRef(), StructDispNode::GetXCurr(), iTa, Mat3x3::MulTM(), NUMNODES, phi_tilde_n, pNode, RotManip::Rot(), T_overline, RotManip::VecRot(), xa, and Zero3x3.
Referenced by AssRes(), and ComputeInitialNodeOrientation().
|
inlinevirtual |
Implements Elem.
Definition at line 366 of file shelleasans.h.
References iGetNumDof().
Referenced by AssJac(), and AssRes().

|
protected |
Definition at line 252 of file shelleasans.h.
Referenced by Shell4EASANS().
|
protected |
Definition at line 253 of file shelleasans.h.
Referenced by AssJac(), AssRes(), and Shell4EASANS().
|
protected |
Definition at line 257 of file shelleasans.h.
|
protected |
Definition at line 269 of file shelleasans.h.
Referenced by AssRes().
|
protected |
Definition at line 289 of file shelleasans.h.
|
protected |
Definition at line 278 of file shelleasans.h.
Referenced by AssRes().
|
protected |
Definition at line 259 of file shelleasans.h.
|
protected |
Definition at line 283 of file shelleasans.h.
Referenced by AssJac(), AssRes(), and Shell4EASANS().
Definition at line 215 of file shelleasans.h.
Referenced by AssRes(), and Shell4EASANS().
Definition at line 213 of file shelleasans.h.
Referenced by AssRes(), and Shell4EASANS().
Definition at line 220 of file shelleasans.h.
Referenced by AssRes().
Definition at line 218 of file shelleasans.h.
Referenced by AssRes().
Definition at line 216 of file shelleasans.h.
Referenced by AssRes(), and Shell4EASANS().
Definition at line 214 of file shelleasans.h.
Referenced by AssRes(), and Shell4EASANS().
Definition at line 221 of file shelleasans.h.
Referenced by AssRes().
Definition at line 219 of file shelleasans.h.
Referenced by AssRes().
|
protected |
Definition at line 271 of file shelleasans.h.
Referenced by AssRes().
|
protected |
Definition at line 270 of file shelleasans.h.
Referenced by AssRes().
|
protected |
Definition at line 277 of file shelleasans.h.
|
protected |
Definition at line 260 of file shelleasans.h.
Definition at line 165 of file shelleasans.h.
Referenced by ComputeInitialNodeOrientation(), and UpdateNodalAndAveragePosAndOrientation().
Definition at line 167 of file shelleasans.h.
Referenced by ComputeInitialNodeOrientation(), and InterpolateOrientation().
Definition at line 166 of file shelleasans.h.
Referenced by ComputeInitialNodeOrientation(), and InterpolateOrientation().
Definition at line 206 of file shelleasans.h.
Referenced by AssRes(), ComputeIPCurvature(), and Shell4EASANS().
Definition at line 207 of file shelleasans.h.
Referenced by AssRes(), ComputeIPCurvature(), and Shell4EASANS().
|
protected |
Definition at line 264 of file shelleasans.h.
Definition at line 225 of file shelleasans.h.
Referenced by AssRes(), and Shell4EASANS().
Definition at line 228 of file shelleasans.h.
Referenced by AssRes().
Definition at line 226 of file shelleasans.h.
Referenced by AssRes(), and Shell4EASANS().
Definition at line 229 of file shelleasans.h.
Referenced by AssRes().
Definition at line 193 of file shelleasans.h.
Referenced by AssRes(), and ComputeIPCurvature().
Definition at line 194 of file shelleasans.h.
Referenced by AssRes(), and ComputeIPCurvature().
|
protected |
Definition at line 255 of file shelleasans.h.
Referenced by AssRes(), and Shell4EASANS().
|
protected |
Definition at line 254 of file shelleasans.h.
Referenced by AssRes(), ComputeIPCurvature(), and Shell4EASANS().
|
protected |
Definition at line 262 of file shelleasans.h.
Referenced by AssJac(), AssRes(), and Shell4EASANS().
Definition at line 192 of file shelleasans.h.
Referenced by AssRes(), and InterpolateOrientation().
Definition at line 191 of file shelleasans.h.
Referenced by AssRes(), ComputeIPCurvature(), and InterpolateOrientation().
|
protected |
Definition at line 174 of file shelleasans.h.
Referenced by InterpolateOrientation().
Definition at line 173 of file shelleasans.h.
Referenced by InterpolateOrientation().
Definition at line 172 of file shelleasans.h.
Referenced by ComputeIPCurvature(), and InterpolateOrientation().
Definition at line 169 of file shelleasans.h.
Referenced by AssRes(), ComputeIPCurvature(), InterpolateOrientation(), and UpdateNodalAndAveragePosAndOrientation().
|
protected |
Definition at line 153 of file shelleasans.h.
Referenced by AssJac(), AssRes(), ComputeInitialNodeOrientation(), GetConnectedNodes(), pGetNode(), Shell4EASANS(), and UpdateNodalAndAveragePosAndOrientation().
|
protected |
Definition at line 279 of file shelleasans.h.
Referenced by AssRes().
Definition at line 203 of file shelleasans.h.
Definition at line 202 of file shelleasans.h.
|
protected |
Definition at line 249 of file shelleasans.h.
Referenced by Shell4EASANS().
|
protected |
Definition at line 251 of file shelleasans.h.
Referenced by Shell4EASANS().
|
protected |
Definition at line 250 of file shelleasans.h.
Referenced by Shell4EASANS().
|
protected |
Definition at line 286 of file shelleasans.h.
|
protected |
Definition at line 177 of file shelleasans.h.
Referenced by Shell4EASANS().
|
protected |
Definition at line 187 of file shelleasans.h.
Referenced by InterpolateOrientation(), and Shell4EASANS().
|
protected |
Definition at line 183 of file shelleasans.h.
Referenced by Shell4EASANS().
Definition at line 185 of file shelleasans.h.
Referenced by Shell4EASANS().
Definition at line 184 of file shelleasans.h.
Referenced by Shell4EASANS().
Definition at line 189 of file shelleasans.h.
Referenced by AssRes(), ComputeInitialNodeOrientation(), InterpolateOrientation(), and Shell4EASANS().
Definition at line 188 of file shelleasans.h.
Referenced by AssRes(), ComputeInitialNodeOrientation(), InterpolateOrientation(), and Shell4EASANS().
|
protected |
Definition at line 179 of file shelleasans.h.
Referenced by ComputeIPCurvature(), InterpolateOrientation(), Shell4EASANS(), and UpdateNodalAndAveragePosAndOrientation().
|
static |
Definition at line 117 of file shelleasans.h.
Definition at line 163 of file shelleasans.h.
Referenced by AssRes(), ComputeInitialNodeOrientation(), Shell4EASANS(), and UpdateNodalAndAveragePosAndOrientation().
Definition at line 162 of file shelleasans.h.
Referenced by Shell4EASANS().
|
static |
Definition at line 142 of file shelleasans.h.
Referenced by InterpolateOrientation(), and Shell4EASANS().
|
static |
Definition at line 129 of file shelleasans.h.
Referenced by AssRes(), ComputeInitialNodeOrientation(), InterpolateOrientation(), and Shell4EASANS().
|
static |
Definition at line 116 of file shelleasans.h.
Referenced by AssRes(), ComputeInitialNodeOrientation(), ComputeIPCurvature(), InterpolateOrientation(), and Shell4EASANS().
|
static |
Definition at line 140 of file shelleasans.h.
Referenced by ComputeInitialNodeOrientation().
Definition at line 266 of file shelleasans.h.
Referenced by AssRes(), and Shell4EASANS().
Definition at line 267 of file shelleasans.h.
Referenced by AssRes(), and Shell4EASANS().
 1.8.7
1.8.7 
