|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
#include <rotor.h>
Public Member Functions | |
| Rotor (unsigned int uL, const DofOwner *pDO) | |
| Rotor (unsigned int uL, const DofOwner *pDO, const StructNode *pC, const Mat3x3 &rrot, const StructNode *pR, const StructNode *pG, ResForceSet **ppres, const doublereal &dR, unsigned int iMaxIt, const doublereal &dTol, const doublereal &dE, flag fOut) | |
| virtual | ~Rotor (void) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP) |
| virtual void | Output (OutputHandler &OH) const |
| virtual std::ostream & | Restart (std::ostream &out) const |
| virtual void | SetInitialValue (VectorHandler &) |
| virtual const Vec3 & | GetXCurr (void) const |
| virtual doublereal | dGetOmega (void) const |
| virtual doublereal | dGetRadius (void) const |
| virtual doublereal | dGetMu (void) const |
| virtual const Vec3 & | GetForces (void) const |
| virtual const Vec3 & | GetMoments (void) const |
| virtual void | GetConnectedNodes (std::vector< const Node * > &connectedNodes) const |
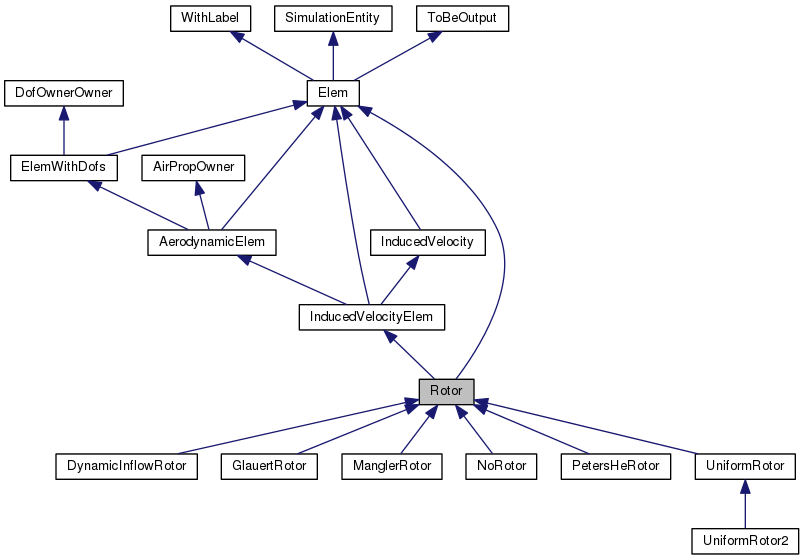
 Public Member Functions inherited from Elem Public Member Functions inherited from Elem | |
| Elem (unsigned int uL, flag fOut) | |
| virtual | ~Elem (void) |
| virtual std::ostream & | DescribeDof (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeDof (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual std::ostream & | DescribeEq (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeEq (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual void | AssMats (VariableSubMatrixHandler &WorkMatA, VariableSubMatrixHandler &WorkMatB, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr)=0 |
| virtual bool | bInverseDynamics (void) const |
| void | SetInverseDynamicsFlags (unsigned uIDF) |
| unsigned | GetInverseDynamicsFlags (void) const |
| bool | bIsErgonomy (void) const |
| bool | bIsRightHandSide (void) const |
| virtual VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| virtual SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr, const VectorHandler &XPrimePrimeCurr, InverseDynamics::Order iOrder=InverseDynamics::INVERSE_DYNAMICS) |
| virtual int | GetNumConnectedNodes (void) const |
| Public Member Functions inherited from WithLabel | |
| WithLabel (unsigned int uL=0, const std::string &sN="") | |
| virtual | ~WithLabel (void) |
| void | PutLabel (unsigned int uL) |
| void | PutName (const std::string &sN) |
| unsigned int | GetLabel (void) const |
| const std::string & | GetName (void) const |
| Public Member Functions inherited from SimulationEntity | |
| SimulationEntity (void) | |
| virtual | ~SimulationEntity (void) |
| virtual bool | bIsValidIndex (unsigned int i) const |
| virtual DofOrder::Order | GetEqType (unsigned int i) const |
| virtual Hint * | ParseHint (DataManager *pDM, const char *s) const |
| virtual void | BeforePredict (VectorHandler &, VectorHandler &, VectorHandler &, VectorHandler &) const |
| virtual void | AfterPredict (VectorHandler &X, VectorHandler &XP) |
| virtual void | Update (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | DerivativesUpdate (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | Update (const VectorHandler &XCurr, InverseDynamics::Order iOrder) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP, const VectorHandler &XPP) |
| virtual std::ostream & | OutputAppend (std::ostream &out) const |
| virtual void | ReadInitialState (MBDynParser &HP) |
| Public Member Functions inherited from ToBeOutput | |
| ToBeOutput (flag fOut=fDefaultOut) | |
| virtual | ~ToBeOutput (void) |
| virtual void | OutputPrepare (OutputHandler &OH) |
| virtual void | Output (OutputHandler &OH, const VectorHandler &X, const VectorHandler &XP) const |
| virtual flag | fToBeOutput (void) const |
| virtual bool | bToBeOutput (void) const |
| virtual void | SetOutputFlag (flag f=flag(1)) |
| Public Member Functions inherited from InducedVelocityElem | |
| InducedVelocityElem (unsigned int uL, const DofOwner *pDO, const StructNode *pCraft, ResForceSet **ppres, flag fOut) | |
| virtual | ~InducedVelocityElem (void) |
| virtual Elem::Type | GetElemType (void) const |
| virtual AerodynamicElem::Type | GetAerodynamicElemType (void) const |
| virtual DofOrder::Order | GetDofType (unsigned int i) const |
| Public Member Functions inherited from AerodynamicElem | |
| AerodynamicElem (unsigned int uL, const DofOwner *pDO, flag fOut) | |
| virtual | ~AerodynamicElem (void) |
| virtual bool | NeedsAirProperties (void) const |
| virtual const InducedVelocity * | pGetInducedVelocity (void) const |
| Public Member Functions inherited from ElemWithDofs | |
| ElemWithDofs (unsigned int uL, const DofOwner *pDO, flag fOut) | |
| virtual | ~ElemWithDofs (void) |
| Public Member Functions inherited from DofOwnerOwner | |
| DofOwnerOwner (const DofOwner *pDO) | |
| virtual | ~DofOwnerOwner () |
| virtual const DofOwner * | pGetDofOwner (void) const |
| virtual integer | iGetFirstIndex (void) const |
| Public Member Functions inherited from AirPropOwner | |
| AirPropOwner (void) | |
| virtual | ~AirPropOwner (void) |
| virtual void | PutAirProperties (const AirProperties *pAP) |
| virtual flag | fGetAirVelocity (Vec3 &Velocity, const Vec3 &X) const |
| virtual doublereal | dGetAirDensity (const Vec3 &X) const |
| virtual doublereal | dGetAirPressure (const Vec3 &X) const |
| virtual doublereal | dGetAirTemperature (const Vec3 &X) const |
| virtual doublereal | dGetSoundSpeed (const Vec3 &X) const |
| virtual bool | GetAirProps (const Vec3 &X, doublereal &rho, doublereal &c, doublereal &p, doublereal &T) const |
| Public Member Functions inherited from InducedVelocity | |
| InducedVelocity (unsigned int uL, const StructNode *pCraft, ResForceSet **ppres, flag fOut) | |
| virtual | ~InducedVelocity (void) |
| virtual unsigned int | iGetNumPrivData (void) const |
| virtual unsigned int | iGetPrivDataIdx (const char *s) const |
| virtual doublereal | dGetPrivData (unsigned int i) const |
| virtual bool | bSectionalForces (void) const |
| virtual unsigned int | iGetNumDof (void) const |
| virtual InducedVelocity::Type | GetInducedVelocityType (void) const =0 |
| virtual void | AddForce (const Elem *pEl, const StructNode *pNode, const Vec3 &F, const Vec3 &M, const Vec3 &X) |
| virtual void | AddSectionalForce (Elem::Type type, const Elem *pEl, unsigned uPnt, const Vec3 &F, const Vec3 &M, doublereal dW, const Vec3 &X, const Mat3x3 &R, const Vec3 &V, const Vec3 &W) |
| virtual void | ResetForce (void) |
| virtual Vec3 | GetInducedVelocity (Elem::Type type, unsigned uLabel, unsigned uPnt, const Vec3 &X) const =0 |
| virtual void | WorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| virtual VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | SetValue (DataManager *pDM, VectorHandler &, VectorHandler &, SimulationEntity::Hints *ph=0) |
Protected Member Functions | |
| virtual doublereal | dGetPsi (const Vec3 &X) const |
| virtual doublereal | dGetPos (const Vec3 &X) const |
| virtual void | GetPos (const Vec3 &X, doublereal &dr, doublereal &dp) const |
| virtual void | InitParam (bool bComputeMeanInducedVelocity=true) |
| virtual void | Init (const StructNode *pC, const Mat3x3 &rrot, const StructNode *pR, const StructNode *pG, ResForceSet **ppres, const doublereal &dR, unsigned int iMaxIt, const doublereal &dTol, const doublereal &dE, flag fOut) |
Protected Attributes | |
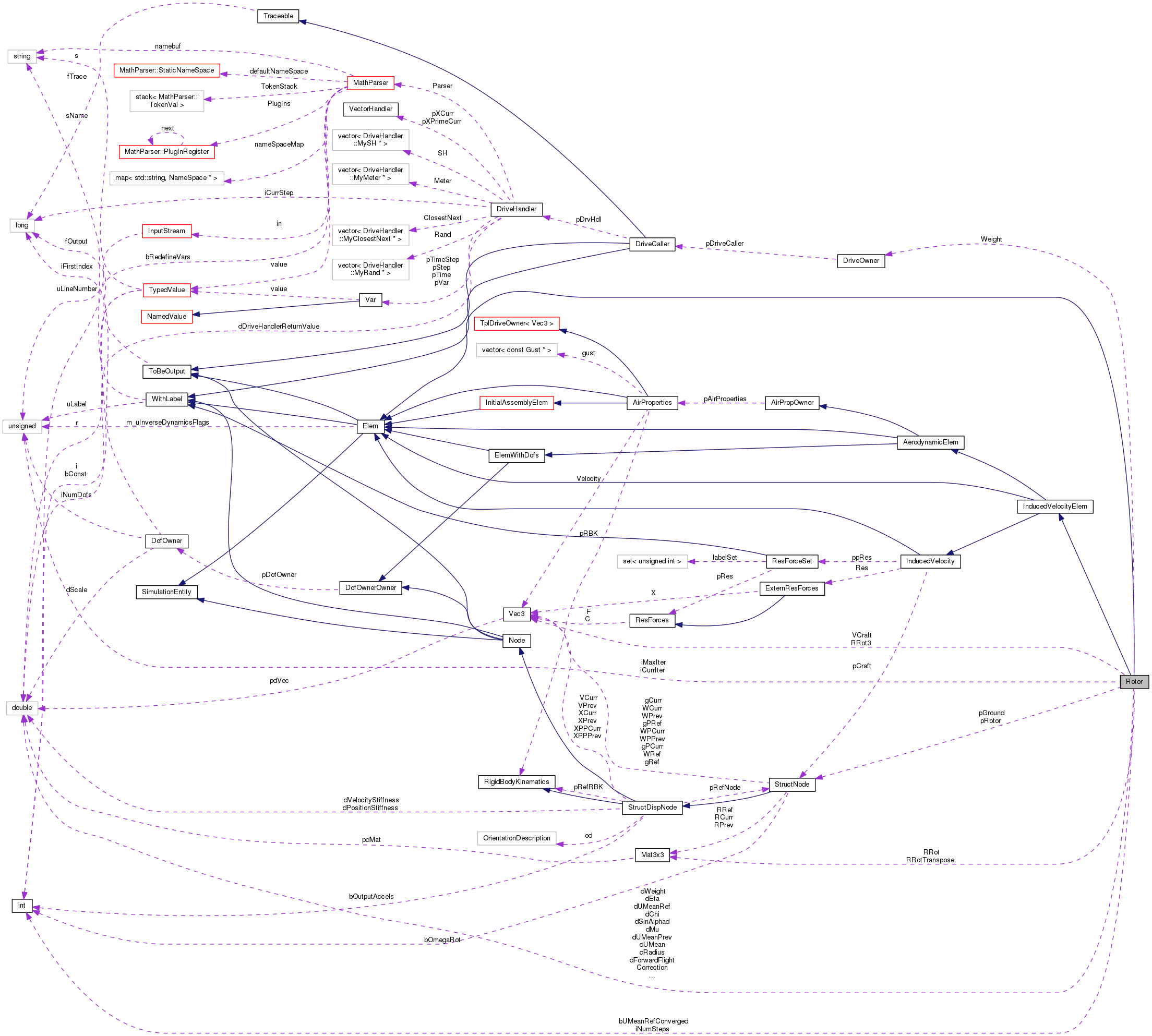
| const StructNode * | pRotor |
| const StructNode * | pGround |
| doublereal | dOmegaRef |
| doublereal | dRadius |
| doublereal | dVTipRef |
| doublereal | dArea |
| doublereal | dUMean |
| doublereal | dUMeanRef |
| doublereal | dUMeanPrev |
| unsigned int | iMaxIter |
| unsigned int | iCurrIter |
| doublereal | dTolerance |
| doublereal | dEta |
| bool | bUMeanRefConverged |
| DriveOwner | Weight |
| doublereal | dWeight |
| doublereal | dHoverCorrection |
| doublereal | dForwardFlightCorrection |
| Mat3x3 | RRotTranspose |
| Mat3x3 | RRot |
| Vec3 | RRot3 |
| Vec3 | VCraft |
| doublereal | dPsi0 |
| doublereal | dSinAlphad |
| doublereal | dCosAlphad |
| doublereal | dMu |
| doublereal | dLambda |
| doublereal | dChi |
| doublereal | dVelocity |
| doublereal | dOmega |
| int | iNumSteps |
| Protected Attributes inherited from WithLabel | |
| unsigned int | uLabel |
| std::string | sName |
| Protected Attributes inherited from ToBeOutput | |
| flag | fOutput |
| Protected Attributes inherited from AirPropOwner | |
| const AirProperties * | pAirProperties |
| Protected Attributes inherited from InducedVelocity | |
| const StructNode * | pCraft |
| ExternResForces | Res |
| ResForceSet ** | ppRes |
Definition at line 59 of file rotor.cc.
References NO_OP.
| Rotor::Rotor | ( | unsigned int | uL, |
| const DofOwner * | pDO, | ||
| const StructNode * | pC, | ||
| const Mat3x3 & | rrot, | ||
| const StructNode * | pR, | ||
| const StructNode * | pG, | ||
| ResForceSet ** | ppres, | ||
| const doublereal & | dR, | ||
| unsigned int | iMaxIt, | ||
| const doublereal & | dTol, | ||
| const doublereal & | dE, | ||
| flag | fOut | ||
| ) |
Definition at line 82 of file rotor.cc.
References Init().

|
virtual |
|
virtual |
Reimplemented from InducedVelocity.
Definition at line 152 of file rotor.cc.
References InducedVelocity::AfterConvergence(), DriveOwner::dGet(), dUMean, dUMeanPrev, dWeight, WithLabel::GetLabel(), iNumSteps, DriveOwner::pGetDriveCaller(), and Weight.

|
inlinevirtual |
|
inlinevirtual |
Definition at line 151 of file rotor.h.
References dOmega.
Referenced by AerodynamicBody::AssJac(), AerodynamicBeam::AssJac(), AerodynamicBeam2::AssJac(), AerodynamicBody::AssVec(), AerodynamicBeam::AssVec(), AerodynamicBeam2::AssVec(), and RotorTrim::GetData().
|
protectedvirtual |
Definition at line 296 of file rotor.cc.
References GetPos().
Referenced by UniformRotor::AssRes(), and ManglerRotor::AssRes().

|
protectedvirtual |
Definition at line 286 of file rotor.cc.
References GetPos().
Referenced by UniformRotor::AssRes(), and ManglerRotor::AssRes().

|
inlinevirtual |
Definition at line 158 of file rotor.h.
References dRadius.
Referenced by ReadGenel(), and RotorTrim::RotorTrim().
|
inlinevirtual |
Reimplemented from Elem.
Definition at line 190 of file rotor.h.
References InducedVelocity::pCraft, pGround, and pRotor.
Referenced by RotorTrim::GetConnectedNodes().
|
inlinevirtual |
Reimplemented from InducedVelocity.
Definition at line 172 of file rotor.h.
References ResForces::Force(), and InducedVelocity::Res.

|
inlinevirtual |
Reimplemented from InducedVelocity.
Definition at line 179 of file rotor.h.
References ResForces::Moment(), and InducedVelocity::Res.

|
protectedvirtual |
Definition at line 304 of file rotor.cc.
References ASSERT, grad::atan2(), dPsi0, dRadius, ExternResForces::Pole(), InducedVelocity::Res, RRotTranspose, and grad::sqrt().
Referenced by DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), dGetPos(), dGetPsi(), GlauertRotor::GetInducedVelocity(), ManglerRotor::GetInducedVelocity(), DynamicInflowRotor::GetInducedVelocity(), and PetersHeRotor::GetInducedVelocity().

|
inlinevirtual |
Reimplemented from InducedVelocity.
Definition at line 146 of file rotor.h.
References StructDispNode::GetXCurr(), and pRotor.
Referenced by DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), RotorTrim::GetData(), and InitParam().

|
protectedvirtual |
Definition at line 112 of file rotor.cc.
References dEta, dRadius, dTolerance, WithLabel::GetLabel(), StructNode::GetRCurr(), Mat3x3::GetVec(), iMaxIter, InducedVelocity::pCraft, pGround, InducedVelocity::ppRes, pRotor, RRot, and ToBeOutput::SetOutputFlag().
Referenced by NoRotor::Init(), UniformRotor::Init(), GlauertRotor::Init(), ManglerRotor::Init(), DynamicInflowRotor::Init(), PetersHeRotor::Init(), and Rotor().

Definition at line 323 of file rotor.cc.
References ASSERT, grad::atan2(), bUMeanRefConverged, copysign(), dArea, dChi, dCosAlphad, dEta, dForwardFlightCorrection, AirPropOwner::dGetAirDensity(), dHoverCorrection, dLambda, dMu, dOmega, dPsi0, dRadius, dSinAlphad, dTolerance, dUMean, dUMeanPrev, dUMeanRef, dVelocity, dVTipRef, dVTipTreshold, dWeight, AirPropOwner::fGetAirVelocity(), ResForces::Force(), WithLabel::GetLabel(), StructNode::GetRCurr(), StructDispNode::GetVCurr(), Mat3x3::GetVec(), StructNode::GetWCurr(), GetXCurr(), StructDispNode::GetXCurr(), iCurrIter, iMaxIter, MBDYN_EXCEPT_ARGS, grad::Norm(), InducedVelocity::pCraft, pGround, pRotor, ExternResForces::PutPole(), InducedVelocity::Res, RRot, RRot3, RRotTranspose, grad::sqrt(), Mat3x3::Transpose(), VCraft, and Zero3.
Referenced by NoRotor::AssRes(), UniformRotor::AssRes(), GlauertRotor::AssRes(), ManglerRotor::AssRes(), DynamicInflowRotor::AssRes(), and PetersHeRotor::AssRes().

|
virtual |
Reimplemented from ToBeOutput.
Reimplemented in PetersHeRotor, and DynamicInflowRotor.
Definition at line 183 of file rotor.cc.
References grad::atan2(), ToBeOutput::bToBeOutput(), bUMeanRefConverged, dChi, dCosAlphad, dLambda, dMu, dPsi0, dSinAlphad, dUMean, dVelocity, ResForces::Force(), WithLabel::GetLabel(), iCurrIter, ResForces::Moment(), InducedVelocity::ppRes, InducedVelocity::Res, OutputHandler::Rotors(), and RRotTranspose.

|
virtual |
Implements Elem.
Reimplemented in PetersHeRotor, DynamicInflowRotor, ManglerRotor, GlauertRotor, UniformRotor, and NoRotor.
Definition at line 535 of file rotor.cc.
References WithLabel::GetLabel(), InducedVelocity::pCraft, and pRotor.
Referenced by NoRotor::Restart(), UniformRotor::Restart(), GlauertRotor::Restart(), ManglerRotor::Restart(), DynamicInflowRotor::Restart(), and PetersHeRotor::Restart().

|
inlinevirtual |
Reimplemented from InducedVelocity.
Reimplemented in PetersHeRotor, and DynamicInflowRotor.
Definition at line 142 of file rotor.h.
References NO_OP.
|
protected |
Definition at line 63 of file rotor.h.
Referenced by InitParam(), Output(), DynamicInflowRotor::Output(), and PetersHeRotor::Output().
|
protected |
Definition at line 53 of file rotor.h.
Referenced by DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), UniformRotor::Init(), GlauertRotor::Init(), ManglerRotor::Init(), DynamicInflowRotor::Init(), PetersHeRotor::Init(), and InitParam().
|
protected |
Definition at line 84 of file rotor.h.
Referenced by DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), GlauertRotor::GetInducedVelocity(), GlauertRotor::Init(), InitParam(), Output(), DynamicInflowRotor::Output(), and PetersHeRotor::Output().
|
protected |
Definition at line 81 of file rotor.h.
Referenced by UniformRotor::AssRes(), ManglerRotor::AssRes(), DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), InitParam(), Output(), DynamicInflowRotor::Output(), and PetersHeRotor::Output().
|
protected |
Definition at line 62 of file rotor.h.
Referenced by Init(), and InitParam().
|
protected |
Definition at line 72 of file rotor.h.
Referenced by DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), UniformRotor::Init(), GlauertRotor::Init(), ManglerRotor::Init(), DynamicInflowRotor::Init(), PetersHeRotor::Init(), InitParam(), UniformRotor::Restart(), GlauertRotor::Restart(), ManglerRotor::Restart(), DynamicInflowRotor::Restart(), and PetersHeRotor::Restart().
|
protected |
Definition at line 70 of file rotor.h.
Referenced by DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), UniformRotor::Init(), GlauertRotor::Init(), ManglerRotor::Init(), DynamicInflowRotor::Init(), PetersHeRotor::Init(), InitParam(), UniformRotor::Restart(), GlauertRotor::Restart(), ManglerRotor::Restart(), DynamicInflowRotor::Restart(), and PetersHeRotor::Restart().
|
protected |
Definition at line 83 of file rotor.h.
Referenced by UniformRotor::AssRes(), ManglerRotor::AssRes(), DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), GlauertRotor::GetInducedVelocity(), GlauertRotor::Init(), InitParam(), Output(), DynamicInflowRotor::Output(), and PetersHeRotor::Output().
|
protected |
Definition at line 82 of file rotor.h.
Referenced by UniformRotor::AssRes(), ManglerRotor::AssRes(), DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), dGetMu(), GlauertRotor::GetInducedVelocity(), GlauertRotor::Init(), InitParam(), Output(), DynamicInflowRotor::Output(), and PetersHeRotor::Output().
|
protected |
Definition at line 87 of file rotor.h.
Referenced by UniformRotor::AssRes(), ManglerRotor::AssRes(), DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), dGetOmega(), DynamicInflowRotor::GetInducedVelocity(), PetersHeRotor::GetInducedVelocity(), DynamicInflowRotor::Init(), PetersHeRotor::Init(), and InitParam().
|
protected |
Definition at line 49 of file rotor.h.
Referenced by UniformRotor::Init(), GlauertRotor::Init(), ManglerRotor::Init(), DynamicInflowRotor::Init(), and PetersHeRotor::Init().
|
protected |
Definition at line 79 of file rotor.h.
Referenced by UniformRotor::AssRes(), ManglerRotor::AssRes(), DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), GetPos(), GlauertRotor::Init(), ManglerRotor::Init(), DynamicInflowRotor::Init(), PetersHeRotor::Init(), InitParam(), Output(), DynamicInflowRotor::Output(), and PetersHeRotor::Output().
|
protected |
Definition at line 51 of file rotor.h.
Referenced by UniformRotor::AssRes(), ManglerRotor::AssRes(), DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), dGetRadius(), DynamicInflowRotor::GetInducedVelocity(), PetersHeRotor::GetInducedVelocity(), GetPos(), Init(), UniformRotor::Init(), GlauertRotor::Init(), ManglerRotor::Init(), DynamicInflowRotor::Init(), PetersHeRotor::Init(), InitParam(), UniformRotor::Restart(), GlauertRotor::Restart(), ManglerRotor::Restart(), DynamicInflowRotor::Restart(), and PetersHeRotor::Restart().
|
protected |
Definition at line 80 of file rotor.h.
Referenced by UniformRotor::AssRes(), ManglerRotor::AssRes(), DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), ManglerRotor::GetInducedVelocity(), ManglerRotor::Init(), InitParam(), Output(), DynamicInflowRotor::Output(), and PetersHeRotor::Output().
|
protected |
Definition at line 61 of file rotor.h.
Referenced by Init(), and InitParam().
|
protected |
Definition at line 54 of file rotor.h.
Referenced by AfterConvergence(), UniformRotor::AssRes(), ManglerRotor::AssRes(), DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), InitParam(), Output(), DynamicInflowRotor::Output(), and PetersHeRotor::Output().
|
mutableprotected |
Definition at line 56 of file rotor.h.
Referenced by AfterConvergence(), UniformRotor::GetInducedVelocity(), GlauertRotor::GetInducedVelocity(), ManglerRotor::GetInducedVelocity(), UniformRotor::Init(), GlauertRotor::Init(), ManglerRotor::Init(), and InitParam().
|
protected |
Definition at line 55 of file rotor.h.
Referenced by InitParam().
|
protected |
Definition at line 86 of file rotor.h.
Referenced by UniformRotor::AssRes(), ManglerRotor::AssRes(), DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), InitParam(), Output(), DynamicInflowRotor::Output(), and PetersHeRotor::Output().
|
protected |
Definition at line 52 of file rotor.h.
Referenced by DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), UniformRotor::Init(), GlauertRotor::Init(), ManglerRotor::Init(), DynamicInflowRotor::Init(), PetersHeRotor::Init(), and InitParam().
|
protected |
Definition at line 68 of file rotor.h.
Referenced by AfterConvergence(), DynamicInflowRotor::Init(), PetersHeRotor::Init(), and InitParam().
|
protected |
Definition at line 60 of file rotor.h.
Referenced by InitParam(), Output(), DynamicInflowRotor::Output(), and PetersHeRotor::Output().
|
protected |
Definition at line 59 of file rotor.h.
Referenced by Init(), and InitParam().
|
mutableprotected |
Definition at line 92 of file rotor.h.
Referenced by AfterConvergence().
|
protected |
Definition at line 47 of file rotor.h.
Referenced by GetConnectedNodes(), Init(), and InitParam().
|
protected |
Definition at line 46 of file rotor.h.
Referenced by UniformRotor::AssRes(), ManglerRotor::AssRes(), DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), GetConnectedNodes(), GetXCurr(), Init(), InitParam(), and Restart().
|
protected |
Definition at line 76 of file rotor.h.
Referenced by Init(), and InitParam().
|
protected |
Definition at line 77 of file rotor.h.
Referenced by DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), UniformRotor::GetInducedVelocity(), GlauertRotor::GetInducedVelocity(), ManglerRotor::GetInducedVelocity(), DynamicInflowRotor::GetInducedVelocity(), PetersHeRotor::GetInducedVelocity(), UniformRotor::Init(), GlauertRotor::Init(), ManglerRotor::Init(), DynamicInflowRotor::Init(), PetersHeRotor::Init(), and InitParam().
|
protected |
Definition at line 75 of file rotor.h.
Referenced by DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), GetPos(), GlauertRotor::Init(), ManglerRotor::Init(), DynamicInflowRotor::Init(), PetersHeRotor::Init(), InitParam(), Output(), DynamicInflowRotor::Output(), and PetersHeRotor::Output().
|
protected |
Definition at line 78 of file rotor.h.
Referenced by UniformRotor::AssRes(), ManglerRotor::AssRes(), DynamicInflowRotor::AssRes(), PetersHeRotor::AssRes(), and InitParam().
|
protected |
Definition at line 65 of file rotor.h.
Referenced by AfterConvergence(), UniformRotor::Init(), GlauertRotor::Init(), ManglerRotor::Init(), UniformRotor::Restart(), GlauertRotor::Restart(), and ManglerRotor::Restart().
 1.8.7
1.8.7 
