|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
#include <strforce_impl.h>
Public Member Functions | |
| FollowerInternalForce (unsigned int uL, const StructNode *pN1, const StructNode *pN2, const TplDriveCaller< Vec3 > *pDC, const Vec3 &TmpArm1, const Vec3 &TmpArm2, flag fOut) | |
| ~FollowerInternalForce (void) | |
| virtual Force::Type | GetForceType (void) const |
| virtual std::ostream & | Restart (std::ostream &out) const |
| void | WorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| virtual VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, const VectorHandler &, const VectorHandler &, const VectorHandler &, InverseDynamics::Order iOrder) |
| virtual void | OutputPrepare (OutputHandler &OH) |
| virtual void | Output (OutputHandler &OH) const |
| virtual void | InitialWorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| virtual VariableSubMatrixHandler & | InitialAssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| virtual SubVectorHandler & | InitialAssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr) |
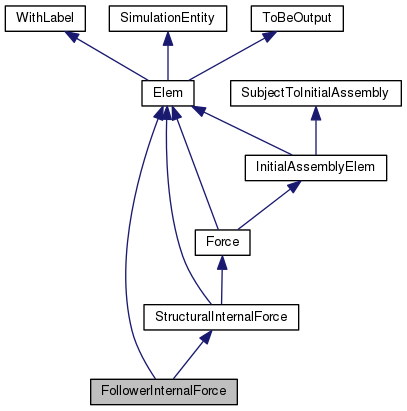
 Public Member Functions inherited from Elem Public Member Functions inherited from Elem | |
| Elem (unsigned int uL, flag fOut) | |
| virtual | ~Elem (void) |
| virtual unsigned int | iGetNumDof (void) const |
| virtual std::ostream & | DescribeDof (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeDof (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual std::ostream & | DescribeEq (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeEq (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual DofOrder::Order | GetDofType (unsigned int) const |
| virtual void | AssMats (VariableSubMatrixHandler &WorkMatA, VariableSubMatrixHandler &WorkMatB, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual bool | bInverseDynamics (void) const |
| void | SetInverseDynamicsFlags (unsigned uIDF) |
| unsigned | GetInverseDynamicsFlags (void) const |
| bool | bIsErgonomy (void) const |
| bool | bIsRightHandSide (void) const |
| virtual VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| virtual int | GetNumConnectedNodes (void) const |
| Public Member Functions inherited from WithLabel | |
| WithLabel (unsigned int uL=0, const std::string &sN="") | |
| virtual | ~WithLabel (void) |
| void | PutLabel (unsigned int uL) |
| void | PutName (const std::string &sN) |
| unsigned int | GetLabel (void) const |
| const std::string & | GetName (void) const |
| Public Member Functions inherited from SimulationEntity | |
| SimulationEntity (void) | |
| virtual | ~SimulationEntity (void) |
| virtual bool | bIsValidIndex (unsigned int i) const |
| virtual DofOrder::Order | GetEqType (unsigned int i) const |
| virtual void | SetValue (DataManager *pDM, VectorHandler &X, VectorHandler &XP, SimulationEntity::Hints *h=0) |
| virtual Hint * | ParseHint (DataManager *pDM, const char *s) const |
| virtual void | BeforePredict (VectorHandler &, VectorHandler &, VectorHandler &, VectorHandler &) const |
| virtual void | AfterPredict (VectorHandler &X, VectorHandler &XP) |
| virtual void | Update (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | DerivativesUpdate (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | Update (const VectorHandler &XCurr, InverseDynamics::Order iOrder) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP, const VectorHandler &XPP) |
| virtual unsigned int | iGetNumPrivData (void) const |
| virtual unsigned int | iGetPrivDataIdx (const char *s) const |
| virtual doublereal | dGetPrivData (unsigned int i) const |
| virtual std::ostream & | OutputAppend (std::ostream &out) const |
| virtual void | ReadInitialState (MBDynParser &HP) |
| Public Member Functions inherited from ToBeOutput | |
| ToBeOutput (flag fOut=fDefaultOut) | |
| virtual | ~ToBeOutput (void) |
| virtual void | Output (OutputHandler &OH, const VectorHandler &X, const VectorHandler &XP) const |
| virtual flag | fToBeOutput (void) const |
| virtual bool | bToBeOutput (void) const |
| virtual void | SetOutputFlag (flag f=flag(1)) |
| Public Member Functions inherited from StructuralInternalForce | |
| StructuralInternalForce (unsigned int uL, const StructNode *pN1, const StructNode *pN2, const TplDriveCaller< Vec3 > *pDC, flag fOut) | |
| virtual | ~StructuralInternalForce (void) |
| virtual void | GetConnectedNodes (std::vector< const Node * > &connectedNodes) const |
| Public Member Functions inherited from Force | |
| Force (unsigned int uL, flag fOut) | |
| virtual | ~Force (void) |
| virtual Elem::Type | GetElemType (void) const |
| virtual unsigned int | iGetInitialNumDof (void) const |
| Public Member Functions inherited from InitialAssemblyElem | |
| InitialAssemblyElem (unsigned int uL, flag fOut) | |
| virtual | ~InitialAssemblyElem (void) |
| Public Member Functions inherited from SubjectToInitialAssembly | |
| SubjectToInitialAssembly (void) | |
| virtual | ~SubjectToInitialAssembly (void) |
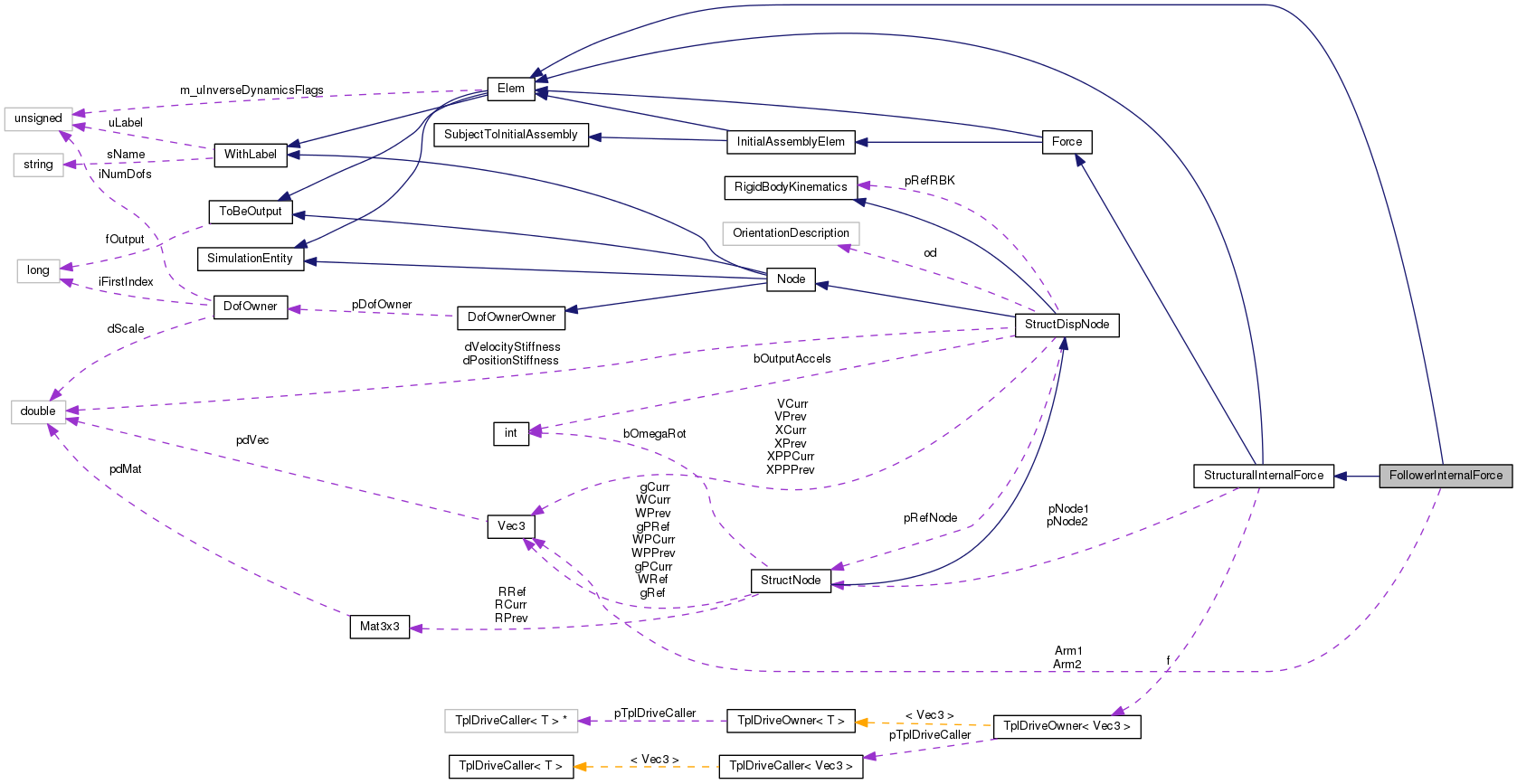
Protected Attributes | |
| const Vec3 | Arm1 |
| const Vec3 | Arm2 |
| Protected Attributes inherited from WithLabel | |
| unsigned int | uLabel |
| std::string | sName |
| Protected Attributes inherited from ToBeOutput | |
| flag | fOutput |
| Protected Attributes inherited from StructuralInternalForce | |
| TplDriveOwner< Vec3 > | f |
| const StructNode * | pNode1 |
| const StructNode * | pNode2 |
Definition at line 564 of file strforce_impl.h.
| FollowerInternalForce::FollowerInternalForce | ( | unsigned int | uL, |
| const StructNode * | pN1, | ||
| const StructNode * | pN2, | ||
| const TplDriveCaller< Vec3 > * | pDC, | ||
| const Vec3 & | TmpArm1, | ||
| const Vec3 & | TmpArm2, | ||
| flag | fOut | ||
| ) |
Definition at line 1843 of file strforce.cc.
References NO_OP.
| FollowerInternalForce::~FollowerInternalForce | ( | void | ) |
Definition at line 1861 of file strforce.cc.
References NO_OP.
|
virtual |
Implements Elem.
Definition at line 1903 of file strforce.cc.
References FullSubMatrixHandler::Add(), Arm1, Arm2, DEBUGCOUT, StructuralInternalForce::f, TplDriveOwner< T >::Get(), StructNode::GetRRef(), StructDispNode::iGetFirstMomentumIndex(), StructDispNode::iGetFirstPositionIndex(), MatCross, MatCrossCross, StructuralInternalForce::pNode1, StructuralInternalForce::pNode2, FullSubMatrixHandler::PutColIndex(), FullSubMatrixHandler::PutRowIndex(), FullSubMatrixHandler::ResizeReset(), VariableSubMatrixHandler::SetFull(), FullSubMatrixHandler::Sub(), and WorkSpaceDim().

|
virtual |
Implements Elem.
Definition at line 1954 of file strforce.cc.
References VectorHandler::Add(), Arm1, Arm2, Vec3::Cross(), DEBUGCOUT, StructuralInternalForce::f, TplDriveOwner< T >::Get(), StructNode::GetRCurr(), StructDispNode::iGetFirstMomentumIndex(), StructuralInternalForce::pNode1, StructuralInternalForce::pNode2, SubVectorHandler::PutRowIndex(), VectorHandler::ResizeReset(), VectorHandler::Sub(), and WorkSpaceDim().

|
virtual |
Reimplemented from Elem.
Definition at line 1990 of file strforce.cc.
References VectorHandler::Add(), Arm1, Arm2, Vec3::Cross(), DEBUGCOUT, StructuralInternalForce::f, TplDriveOwner< T >::Get(), StructNode::GetRCurr(), StructDispNode::iGetFirstPositionIndex(), StructuralInternalForce::pNode1, StructuralInternalForce::pNode2, SubVectorHandler::PutRowIndex(), VectorHandler::ResizeReset(), VectorHandler::Sub(), and WorkSpaceDim().

|
inlinevirtual |
Implements Force.
Definition at line 586 of file strforce_impl.h.
References Force::FOLLOWERINTERNALFORCE.
|
virtual |
Reimplemented from Force.
Definition at line 2099 of file strforce.cc.
References FullSubMatrixHandler::Add(), Arm1, Arm2, DEBUGCOUT, StructuralInternalForce::f, TplDriveOwner< T >::Get(), StructNode::GetRRef(), StructNode::GetWRef(), StructDispNode::iGetFirstPositionIndex(), MatCross, MatCrossCross, StructuralInternalForce::pNode1, StructuralInternalForce::pNode2, FullSubMatrixHandler::PutColIndex(), FullSubMatrixHandler::PutRowIndex(), FullSubMatrixHandler::ResizeReset(), VariableSubMatrixHandler::SetFull(), FullSubMatrixHandler::Sub(), and WorkSpaceDim().

|
virtual |
Implements SubjectToInitialAssembly.
Definition at line 2172 of file strforce.cc.
References VectorHandler::Add(), Arm1, Arm2, grad::Cross(), DEBUGCOUT, StructuralInternalForce::f, TplDriveOwner< T >::Get(), StructNode::GetRCurr(), StructNode::GetWCurr(), StructDispNode::iGetFirstPositionIndex(), InitialWorkSpaceDim(), StructuralInternalForce::pNode1, StructuralInternalForce::pNode2, SubVectorHandler::PutRowIndex(), VectorHandler::ResizeReset(), and VectorHandler::Sub().

|
virtual |
Implements SubjectToInitialAssembly.
Definition at line 1878 of file strforce.cc.
Referenced by InitialAssRes().
|
virtual |
Reimplemented from ToBeOutput.
Definition at line 2058 of file strforce.cc.
References Arm1, Arm2, ToBeOutput::bToBeOutput(), StructuralInternalForce::f, OutputHandler::FORCES, OutputHandler::Forces(), ToBeOutput::fToBeOutput(), TplDriveOwner< T >::Get(), OutputHandler::GetCurrentStep(), WithLabel::GetLabel(), StructNode::GetRCurr(), StructDispNode::GetXCurr(), StructuralForce::OUTPUT_REL, Vec3::pGetVec(), StructuralInternalForce::pNode1, StructuralInternalForce::pNode2, OutputHandler::UseNetCDF(), and OutputHandler::UseText().

|
virtual |
Reimplemented from ToBeOutput.
Definition at line 2026 of file strforce.cc.
References ASSERT, ToBeOutput::bToBeOutput(), OutputHandler::FORCES, ToBeOutput::fToBeOutput(), WithLabel::GetLabel(), OutputHandler::IsOpen(), OutputHandler::NETCDF, StructuralForce::OUTPUT_REL, and OutputHandler::UseNetCDF().

|
virtual |
Implements Elem.
Definition at line 1889 of file strforce.cc.
References Arm1, Arm2, StructuralInternalForce::f, WithLabel::GetLabel(), TplDriveOwner< T >::pGetDriveCaller(), StructuralInternalForce::pNode1, StructuralInternalForce::pNode2, TplDriveCaller< T >::Restart(), Force::Restart(), and Vec3::Write().

Implements Elem.
Definition at line 1868 of file strforce.cc.
Referenced by AssJac(), AssRes(), and InitialAssJac().
|
protected |
Definition at line 567 of file strforce_impl.h.
Referenced by AssJac(), AssRes(), InitialAssJac(), InitialAssRes(), Output(), and Restart().
|
protected |
Definition at line 568 of file strforce_impl.h.
Referenced by AssJac(), AssRes(), InitialAssJac(), InitialAssRes(), Output(), and Restart().
 1.8.7
1.8.7 
