|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
#include <inertia.h>
Public Member Functions | |
| CenterOfMass (std::set< const ElemGravityOwner * > &elements) | |
| virtual | ~CenterOfMass (void) |
Protected Member Functions | |
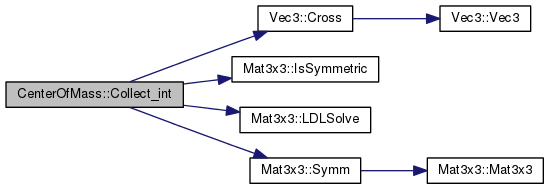
| virtual void | Collect_int (void) |
| virtual std::ostream & | Output_int (std::ostream &out) const |
Protected Attributes | |
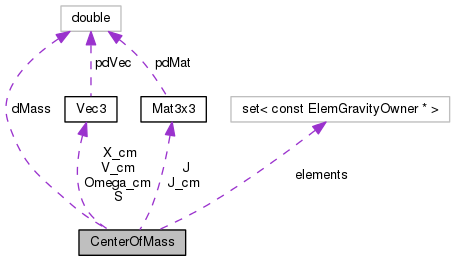
| std::set< const ElemGravityOwner * > | elements |
| doublereal | dMass |
| Vec3 | S |
| Mat3x3 | J |
| Vec3 | X_cm |
| Vec3 | V_cm |
| Vec3 | Omega_cm |
| Mat3x3 | J_cm |
| CenterOfMass::CenterOfMass | ( | std::set< const ElemGravityOwner * > & | elements | ) |
|
virtual |
Definition at line 108 of file inertia.cc.
References NO_OP.
|
protectedvirtual |
Reimplemented in Inertia.
Definition at line 59 of file inertia.cc.
References ASSERT, Vec3::Cross(), dMass, elements, Mat3x3::IsSymmetric(), J, J_cm, Mat3x3::LDLSolve(), MatCrossCross, Omega_cm, S, Mat3x3::Symm(), V_cm, X_cm, Zero3, and Zero3x3.
Referenced by Inertia::Collect_int().
|
protectedvirtual |
Reimplemented in Inertia.
Definition at line 47 of file inertia.cc.
References dMass, J, J_cm, Omega_cm, V_cm, and X_cm.
Referenced by Inertia::Output_int().
|
mutableprotected |
Definition at line 47 of file inertia.h.
Referenced by Collect_int(), Inertia::Collect_int(), Inertia::dGetM(), Inertia::dGetPrivData(), Inertia::Output(), Output_int(), and Inertia::Output_int().
|
protected |
Definition at line 45 of file inertia.h.
Referenced by Collect_int().
|
mutableprotected |
Definition at line 49 of file inertia.h.
Referenced by Collect_int(), Inertia::Collect_int(), Inertia::GetJ_int(), and Output_int().
|
protected |
Definition at line 55 of file inertia.h.
Referenced by Collect_int(), Inertia::Collect_int(), Output_int(), and Inertia::Output_int().
|
protected |
Definition at line 54 of file inertia.h.
Referenced by Collect_int(), Inertia::dGetPrivData(), Inertia::Output(), and Output_int().
|
mutableprotected |
Definition at line 48 of file inertia.h.
Referenced by Collect_int(), and Inertia::GetS_int().
|
protected |
Definition at line 53 of file inertia.h.
Referenced by Collect_int(), Inertia::dGetPrivData(), Inertia::Output(), and Output_int().
|
protected |
Definition at line 52 of file inertia.h.
Referenced by Collect_int(), Inertia::Collect_int(), Inertia::dGetPrivData(), Inertia::Output(), Output_int(), and Inertia::Output_int().
 1.8.7
1.8.7 
